

4. Вторичные телефонные сети
4.1. Принципы телефонной передачи и телефонные аппараты
Телефонная передача может осуществляться по схемам, приведенным на рис.4.1.
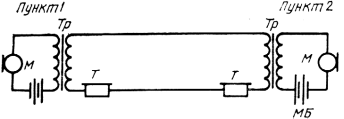
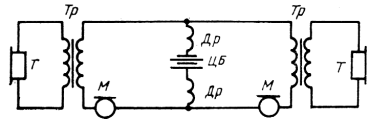
Рис.4.1. Схемы простейшей телефонной передачи: а – по системе с МБ;
б – по системе с ЦБ
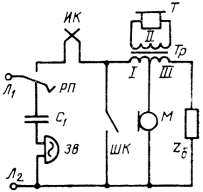
Рис.4.2. Противоместная
схема телефонного аппарата мостового
типа
![]() .
Кроме того, в телефонном аппарате имеется
номеронабиратель, содержащий импульсный
ИК и шунтирующий ШК контакты. Вызывные
и разговорные приборы поочередно
подключаются к линии (Л1 и Л2)
рычажным переключателем РП.
.
Кроме того, в телефонном аппарате имеется
номеронабиратель, содержащий импульсный
ИК и шунтирующий ШК контакты. Вызывные
и разговорные приборы поочередно
подключаются к линии (Л1 и Л2)
рычажным переключателем РП.
4.2. Коммутационные системы
4.2.1. Коммутационные устройства
Коммутационным прибором (КП) называется
устройство, которое под воздействием
управляющих сигналов может изменять
состояние своей проводимости, осуществляя
соединение входа с выходом. В общем
случае КП представляет собой многополюсник,
имеющий
![]() входов,
входов,
![]() выходов и
выходов и
![]() входов управления. В таком многополюснике
при поступлении одного или нескольких
сигналов на входы управления осуществляется
соединение одного из
входов управления. В таком многополюснике
при поступлении одного или нескольких
сигналов на входы управления осуществляется
соединение одного из
![]() входов с любым из
входов с любым из
![]() выходов. В технике автоматической
коммутации часто используются реле,
бесконтактные элементы, искатели,
многократные соединители.
выходов. В технике автоматической
коммутации часто используются реле,
бесконтактные элементы, искатели,
многократные соединители.
Реле и бесконтактные элементы имеют один вход и один выход.
Искатели имеют один вход и
![]() выходов.
выходов.
Соединители содержат
![]() входов и
входов и
![]() выходов.
выходов.
КП должен удовлетворять следующим требованиям:
1) малое сопротивление в состоянии соединения входа с выходом (сотые доли Ома);
2) большое сопротивления отключения входа от выхода (не менее 109 Ома);
3) высокое быстродействие;
4) достаточные коммутационные возможности.
Существуют нейтральные электромагнитные реле, герконовые, ферритовые и поляризационные реле.
К искателям относятся шаговые и декадно-шаговые искатели.
Электромеханический шаговый искатель состоит из статора (поля) и ротора (подвижной части) и движущего механизма (рис. 4.3). Статор представляет собой совокупность контактов (ламелей), образующих выходы искателя. На ротор крепится щетка, подключенная к входному проводу. Движущийся механизм предназначен для перемещения щетки с ламеля на ламель.
В исходном положении шагового вращательного искателя щетка находится вне поля и якорь не притянут (рис. 4.3). При поступлении первого импульса тока в обмотку электромагнита ЭМ якорь Я притягивается к сердечнику электромагнита. Собачка С упирается в зуб храповика Х и приводит во вращение ротор со щетками. При вращении ротора щетка подключается к первому контакту выхода. После окончания импульса под действием пружины П якорь возвращается в исходное состояние, захватывая собачкой С следующий зуб храповика. При каждом последующем импульсе щетка передвигается на один шаг. Имеются искатели на 11 и 17 выходов.
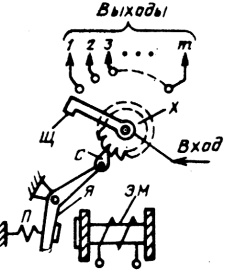
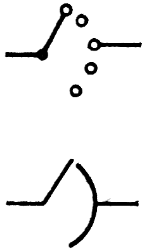
Рис.4.3. Кинематическая схема и условное обозначение шагового искателя
Декадно-шаговый искатель на 100 выходов состоит из контактного поля (статора), ротора (Р) со щетками (Щ) и движущегося механизма (ДМ) (рис.4.4). Контактное поле имеет десятичное (декадное) построение и содержит десять рядов (декад), в каждом из которых содержится по десять контактов. Ротор со щетками совершает два движения – подъем, при котором выбирается декада, и вращение, при котором щетка движется по контактам декады. Движущий механизм содержит два электромагнита, один из которых управляет подъемом щеток, а другой – их движением по контактам декады.
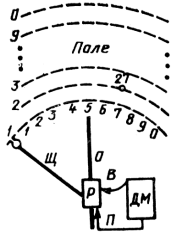
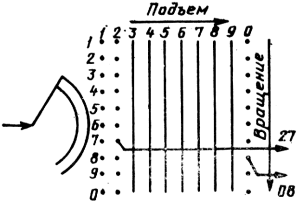
Рис.4.4. Кинематическая схема и условное обозначение декадно-шагового искателя
Многократные соединители. В зависимости от конструкции и типа элемента, используемого для соединения входа с выходом, различают многократные координатные соединители (МКС), выполненные на многоконтактных реле с групповым управлением, многоконтактные герконовые (МГС) и ферритовые (МФС) соединители, у которых в каждой точке коммутации входа с выходом находится герконовое или ферридовое реле.
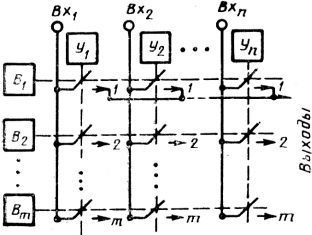
Многоконтактный координатный соединитель
содержит ряд вертикальных колонок
контактов, каждой из которых придан
удерживающий электромагнит и ряд
выбирающих электромагнитов, приданных
горизонталям. Группу контактов с
приданным ей удерживающим электромагнитом
называют вертикалью. Такая вертикаль
по своим коммутационным возможностям
эквивалентна искателю, имеющему один
вход и
![]() выходов. При установлении соединения
между входом вертикали и одним из ее
выходов сначала срабатывает один из
выбирающих
выходов. При установлении соединения
между входом вертикали и одним из ее
выходов сначала срабатывает один из
выбирающих
![]() ,
а затем один из удерживающих
,
а затем один из удерживающих
![]() электромагнитов. При срабатывании
электромагнитов. При срабатывании
![]() подготавливаются к замыканию контакты
вертикалей, расположенные в данном
горизонтальном ряду, а при срабатывании
подготавливаются к замыканию контакты
вертикалей, расположенные в данном
горизонтальном ряду, а при срабатывании
![]() замыкается контакт, расположенный на
пересечении выбранной вертикали и
горизонтали, и вход вертикали подключается
к одному из
замыкается контакт, расположенный на
пересечении выбранной вертикали и
горизонтали, и вход вертикали подключается
к одному из
![]() выходов. Конструктивно МКС выполнен
так, что после срабатывания одного из
выходов. Конструктивно МКС выполнен
так, что после срабатывания одного из
![]() отпускается выбирающий электромагнит,
но контакт остается замкнутым до тех
пор, пока не отпустит удерживающий
электромагнит.
отпускается выбирающий электромагнит,
но контакт остается замкнутым до тех
пор, пока не отпустит удерживающий
электромагнит.
|
а) |
б) |
в) |
г) |
д) |
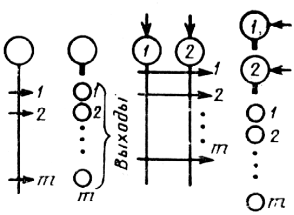
Рис.4.5. Принцип работы МКС (а), условное координатное (б), символическое (в) изображения вертикали, запараллеливание выходов вертикалей в координатном (г) и символическом (д) изображениях
Условное изображение вертикали показано
на рис.4.5,б, в. Первое называется
координатным, второе – символическим.
Выходы вертикалей могут быть запараллелены
между собой (рис.4.5,г, д). Такая
схема, имеющая несколько входов и один
выход, называется коммутатором. Наряду
с запараллеливанием выходов возможно
и запаралеллеливание входов. Все МКС
характеризуются числом входов
(вертикалей), выходов в вертикали и
числом коммутируемых проводов. Наиболее
распространенными являются МКС типов
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Первая цифра определяет число вертикалей,
вторая – число выходов в вертикали,
третья – проводность.
.
Первая цифра определяет число вертикалей,
вторая – число выходов в вертикали,
третья – проводность.
Герконовые, ферридовые и гезаконовые соединители отличаются от МКС типом коммутационных устройств. Аналогичным образом строятся и электронные соединители. В них используются диоды, транзисторы, оптроны.