

5. 3. Система стабилизации заданного угла тангажа
маневренного С-та
Автоматическая стабилизация угла тангажа С-та может быть как самостоятельной функциональной задачей СУ, так и вспомагательной, промежуточной. Первая функция выполняется, например, при аэрофотосъемке, вторая – при управлении траекторией полета путем изменения угла тангажа по определенной программе.
Систему
стабилизации заданного угла тангажа
можно построить либо как самостоятельный
контур, либо на базе существующей системы
стабилизации заданной нормальной
перегрузки, формируя сигнал nyзад
=()
по алгоритму, обеспечивающему требуемое
поведение угла тангажа. Разделив ПФ
свободного С-та
![]() ;
;
выразим z через hy
![]()
Это позволяет условно представить контур стабилизации заданной перегрузки, используемый в качестве подсистемы СУ тангажом, так как показано на рис.
z

В случае С9 =0 ПФ примет вид
![]()
Следует отметить, что ( 2.30 ) и ( 2.31 ) являются ПФ кинематических звеньев (математических моделей, которые отображают связи параметров движения), поэтому к ним не предъявляются требования технической реализации.
5.3.1. Статическая система стабилизации
заданного угла тангажа
Система строится на базе статического контура перегрузки с законом
![]()
Заданная перегрузка формируется в виде функции, пропорциональной разности заданного и текущего угла тангажа
![]()
Закон формирования сигнала управления будет иметь вид
![]()
На рис. ниже приведена расчетная структурная схема системы стабилизации заданного угла тангажа.
ny

В
ней использована упрощенная модель
контура перегрузки, в которой пренебрегают
динамикой привода и подъемной силой
РВ, так как рабочие частоты контура
тангажа лежат значительно левее
собственной частоты привода и частоты,
определяемой нулями ПФ свободного с-та.
На рис. выше
![]() - возмущение, обусловленное погрешностью
датчика угла тангажа;
- возмущение, обусловленное погрешностью
датчика угла тангажа;
![]() - погрешности, обусловленные возмущающим
моментом, ветровым возмущением
- погрешности, обусловленные возмущающим
моментом, ветровым возмущением
![]() , погрешностями датчиков
, погрешностями датчиков
![]() , приведенными к выходу контура
перегрузки.
, приведенными к выходу контура
перегрузки.
Основные свойства системы.
1.Система
отрабатывает команду
![]() без статической ошибки.
без статической ошибки.
Ошибка отработки, найденая по пф ошибки, имеет вид

Поэтому статическая ошибка
![]()
2.Система имеет статические ошибки стабилизации:
-
при постоянной ошибке ДУ тангажа
![]()
![]() ,
,
![]()
при
возмущающем воздействии в контуре
перегрузки, приведенном к его выходу -
![]()
 ;
;![]()
Анализ качества переходных процессов. Основные требования:
tp = 3 – 5 сек; 5%
ПФ
разомкнутого контура тангажа имеет вид

где
![]() - коэффициент передачи разомкнутой
системы.
- коэффициент передачи разомкнутой
системы.
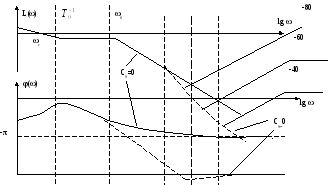
Соответствующие
ей логарифмические амплитудные
![]() и фазовые
и фазовые
![]() частотные характеристики ЛАФЧХ имеют
вид
частотные характеристики ЛАФЧХ имеют
вид
-2
Для получения оптимального переходного процесса частоту среза выбирают в пределах
![]()
При этом переходный процесс в замкнутой системе будет апериодическим и длительность его можно оценить по формуле
![]()
Так
как
![]()
то условием обеспечения заданного быстродействия является выражение
![]()