

1.Явное задание многоугольников.
Многоугольник Р описывается:
P((x1,y1,z1),…(xn,yn,zn))
P – список координат вершин в порядке обхода многоугольника.
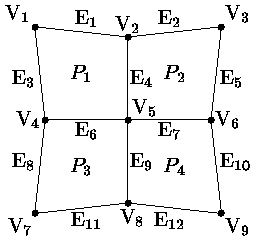
Пример полигональной сетки: Pi - многоугольники, Vj - вершины, Ek – ребра
Недостаток:
-двойная прорисовка ребер
-для поиска многоугольников с одной вершиной необходимо сравнение пар ребер всех примыкающих многоугольников
-неоднозначность определения вершин при сравнении координат (потеря точности)
2.Указатели в список вершин.
Узел сетки запоминается лишь один раз в списке вершин:
V=((x1,y1,z1)…(xn,yn,zn))
Многоугольник определяется ссылкой на элемент списка.
Пример:
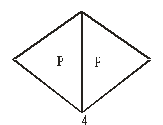
Список вершин:
V=(V1,V2,V3,V4) =((x1,y1,z1)…(xn,yn,zn))
Описание многоугольников:
P2=(1,2,4); P1=(4,2,3)
Преимущество:
- экономия памяти за счет однократного описания каждой вершины
- при преобразовании модели координаты вершин легко меняются.
Недостаток: трудно искать многоугольники с одинаковыми ребрами.
3.Явное задание ребер.
Имеется список вершин V. Имеется список ребер Е, каждый элемент
которого описывает тетраэдр:
Е=( V1,V2, P1,P2)
V1 – вершина 1
V2 – вершина 2
P1 – многоугольник 1
P2 – многоугольник 2
Если ребро принадлежит одному многоугольнику, то одна из ссылок а – пуста.
Многоугольник определяется как ссылка на ребра Р=(Е1,... Еn)
Пример:
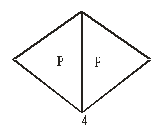
V=(V1,V2,V3,V4)=(x1,y1,z1,...)
E1=(V1,V2,P1, l )
E2=(V2,V3,P2, l )
E3=(V3,V4,P2, l)
E4=(V4,V2,P1,P2)
E5=(V4,V1,P1, l )
P1=(E1,E4,E5)
P2=(E1,E3,E4) E4 – не прорисовывается т.к. ссылка на P1
l = пусто
Вычеркиваются все ребра.
Для определения произвольной точки внутри многоугольника на плоскости можно пользоваться системой уравнений:
Ax+By+Cz+D=0 – уравнение плоскости
Ax1+By1+Cz1+D=0
Ax2+By2+Cz2+D=0
Ax3+By3+Cz3+D=0
Уравнения решаются относительно x,y,z.
Где: коэффициенты A,B,C,D определяются для плоскости по трем вершинам.
6. Параметрическое описание поверхностей
Поверхности, заданные в форме
Х = Х(u,t),
Y = Y(u,t),
Z = Z(u,t),
где u,t - параметры, изменяющиеся в заданных пределах, относятся к классу параметрических. Для одной пары значений (u,t) вычисляется одна точка поверхности.
Параметрическое задание плоскостей
Плоскость, проходящая через точку r0 =(х0,y0,z0) и векторы
![]()
исходящие из этой точки, определяются уравнением
![]()
![]()
или
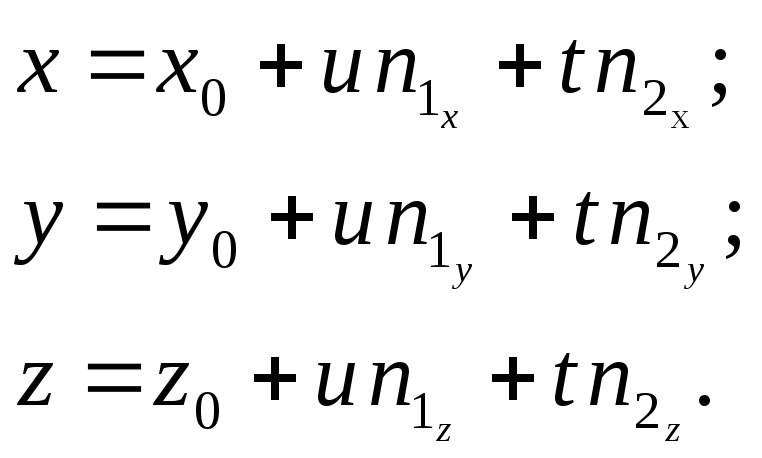
![]()
Данное уравнение
описывает прямоугольник со сторонами,
равными
![]() и
и
![]() ,
если
,
если
![]() , а u,t[0,1].
Нормаль к поверхности можно получить,
вычислив векторное произведение:
, а u,t[0,1].
Нормаль к поверхности можно получить,
вычислив векторное произведение:
![]() .
.
Преимущества параметрического описания поверхности
-
Важным преимуществом параметрического описания поверхностей является возможность передачи очень сложных геометрических форм, описание которых другими методами затруднительно.
-
Параметрическое описание поверхности приспособлено к физическим процессам управления резцом в станках с числовым программным управлением. Резец вытачивает деталь, двигаясь в пространстве по закону, заданному параметрическим описанием.
-
Параметрический подход, единственно приемлемый для моделирования сложных, гладких участков поверхностей при помощи сплайновой аппроксимации.