

1.2.2. Класифікація моделей
По iєрархii моделі можна поділити на "структурні", "функціонально - логичнi", "адекватні" і "компонентнi".
На "структурному" рівні використаються моделі у вигляді вероятностно-статистичних, інформаційних, iммiтационних подань. На цьому рівні основою є система команд управління і тестування.
На "функціонально-логичном" рівні моделі представляються у вигляді графа з наступним застосуванням синхроного, асинхроного і собитійного моделювання. Перемінними на цьому рівні є час затримкi, логичнi змінні. До нього відносяться лічильникі, суматори і т. д.
На "адекватному" рівні моделі представляються у вигляді упрощенних схем (макромоделi, регрессiоннi моделі). На цьому рівні роздивляються окремі каскади, генератори, підсилювачи і т. д. Перемінними є струм і напруга.
На "компонентному" рівні моделі представляються у вигляді докладних еквівалентних схем. Роздивляються окремі iоннi, напівпровідникові та ін. прилади. Перемінними є струми, напруги, потокосцепління, заряд і т. д.
Слідуюче ділення моделей виробляють по динамічним властивостям на статичнi, безинерционні і динамічні. Статична модель описується слідуючим чином
Y AX; Y=G(X);
Yi=gi( x1, x2, ... xn), i=1,m,
де g- аналітична функція.
Безінерционні моделі описуються:
Y(t) = A X(t); Y(t) = F[X(t)];
yi(t) = fi (x1(t), ... xn(t)), i=1,m
Динамічні моделі описуються:
Y(t) = A X(t);
![]()
![]()
Слідуюче ділення моделей на лiнійнi і нелiнійнi.
Лiнійнi статичнi: Y = B X + C;
лiнійнi безінерцiйнi: Y(t) = B X(t) + C;
лiнійнi динамічні: Y(t) = K dx/dt + C(t),
![]()
![]()
Нелiнійнi статичнi: Y = G(x,t);
нелiнійнi безінерцiйнi: Y(t) = F [ X(t), t ];
нелiнійнi динамічні: Y(t) = Ф [dx/dt, X() d, t];
Моделі, в яких функції G, F, Ф володіють властивостями реального гiстерeзiса, називаються гiстерeзеснимi.


Також розглядаються моделі з розподіленими і зосередженими просторовими параметрами.
![]()
![]()
Існують детерміновані і стохастистичні моделі. Якщо оператор носить визначений характер, тоді ми маємо справу з моделлю, що детермінована. Якщо оператор має випадкову величину, тоді це стохастична модель.
1. 3. Параметри моделей і їх iдентифікація
Iдентифікація - це процес визначення оператора А, шляхом визначення параметрів С, при цьому базовою операцією є апроксiмація.
А=А(С), де С={Сi}.
Розрізняють слідуючі критерії апроксiмації (якості апроксiмацiї):

де - апроксіміруюча функція,
- апроксіміруема функція.

![]()
![]()
![]()


В останній час застосовується сплайн апроксімація. Лінія розбиваєтсья на дільниці, а потім при допомозі лiнійки апроксимується.

PK(x(K))=PK+1(x(K));
PK(x(K))=P′K+1(x(K)).
Визначення коефіціентів функції (x) базується на рішенні систем нелiнійних алгебраїчних рівнянь, і інколи на мiнiмiзацiї богатомірних функцій.
Процес апроксiмації треба для побудови статичних і безiнерціонних моделей. Для iдентифікацiї динамічних моделей необхідно використати спеціальні тестовi сигнали
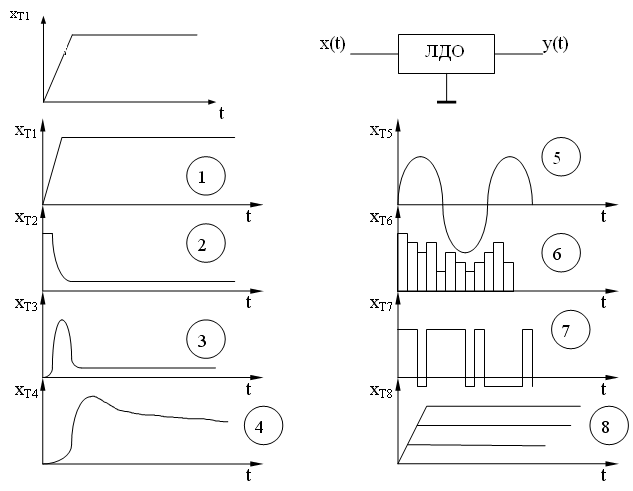
де 1- тестування лiнійних динаміних об'єктів для одержання перехідних функцій;
2- тестування лiнійних динамічних об'єктів для одержання iмпульсних функцій;
3- сгладжуванний сигнал для ІІ-го сигналу;
4- сгладжуванний сигнал для I-го сигналу;
5- гармонійний сигнал для одержання частотних характеристик;
6- шумовий сигнал для дослідження стахостичних об'єктів;
7- двоічний шум для об'єктів роботаючих в двоічной системі;
8- гiпермодель для нелiнійного динамічного об'єкту.
xT(t)=1(t);
![]()
![]()
Можна записати:
![]()
![]()

Якщо Е<EЗАД, тоді модель адекватна.
Якщо моделюємий об'єкт не детермiнован, тоді для оцінки його якості використовується статистичний критерій. Відтворюються моделі по критерію Кохрена. Значимість коефіціенту моделі по критерію Стьюдента. Адекватність моделі по критерію Фiшера.
В процесі моделювання і аналізу роботи електричних пристроїв виробляєтсья дiскретизація в часу сигналу.
![]()
де FГР- межова частота;
![]() ;
;
Крім погрішностi ми зштовхується з погрішностью квантованiя.
![]() —
погрішність квантованiя, яка залежить
від розрядної сітки машини.
—
погрішність квантованiя, яка залежить
від розрядної сітки машини.
![]() gy – дисперсія.
gy – дисперсія.

Бо W розмірність зворотна часу, тоді часто представляє інтерес процес функції об'єкту в частотної області. Для перехіду використовується перетворення Фур'є і Лапласа.
![]() –
пряме перетворея Фур’є;
–
пряме перетворея Фур’є;
![]() –
зворотнє перетворея
Фур’є;
–
зворотнє перетворея
Фур’є;
p=+jr; p=jW;
![]() –
пряме перетворея Фур’є;
–
пряме перетворея Фур’є;
![]() –
зворотнє перетворея
Фур’є.
–
зворотнє перетворея
Фур’є.
x(t)X(jf); y(t)Y(jf).
Порівнюємо вхідний і вихідний сигнали для нелiнійного об'єкту.
Перетворення Фур'є пов'язане з перетворенням Лапласа.
![]() Усі
перетворення використовуються на
визначенних частотах.
Усі
перетворення використовуються на
визначенних частотах.
Якщо FРАБ>FГРАН, тоді переходимо до рівняння Максвела.
rotH=+EaE/t,
де - плотність струму провіднику;
![]() – электромагнітна індукція;
– электромагнітна індукція;
rotE=![]() -
электромагнітна індукція;
-
электромагнітна індукція;
divB=0;
divE=PСВ/Еа.