

6.1.4 Декомпозиція логічних функцій
f( x1, x2, ..., xk, ..., xn) = xk f0 (x1, x2, ..., xk-1, xk+1..., xn) +
+ xk f1 (x1, x2, ..., xk-1, xk+1..., xn),
f0 (x1, x2, ..., xk-1, xk+1..., xn) = f Xk = 0
f1 (x1, x2, ..., xk-1, xk+1..., xn) = f Xk = 1
6.1.5. Реалізація функціонально-логічних властивостей цифрових ез
Функціонально повні набори
Логичний елемент звичайно виконує одну логічну функцію.
Будь-яку функцію можна реалізувати на елементах І, ІЛІ, НЕ. Цей набір є iзбиточним. Повними є І-НЕ, ІЛІ-НЕ, стрілка Пiрса, штриіт Шефера. Для простоти реалізації використають iзбиточний набір.
Два напряму реалізації: комбiнаційні схеми; послідовністi.
Комбiнаційні описуються:
W (k) = F [X(k)]

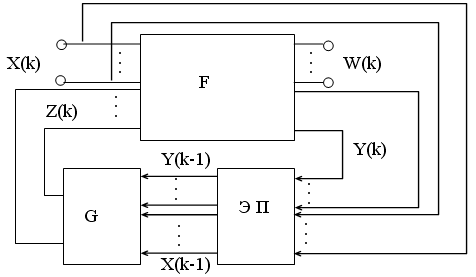
Послідовні описуються:
W (k) = F [X(k), Z(k)], Z (k) = G [X(k-1), Y(k-1)]
При функціонально-логичном моделюваннi цифрових ЕЗ використовуються слідуючі особливості:
-
стан елементів характеризується перемінними одного типу (не конкретизуються I, U т. і.);
2) перемінна приймає дискретні значення (0, 1 або декілька рівней);
3) аналіз схем діється в дiскретні моменти часу по тактам, при цьому зміна хоч би однієї перемінной називається подією.
6.2. Методи моделювання функціонально-логічних схем
Моделювання функціонально-логичних схем ЕЗ здійснюється на основі синхронного, асинхронного моделювання і моделювання на основі богатозначної логіки. Синхронне - описує роботу схеми без обліку затримок, асинхронне - враховує фіксовані затримкi, а богатозначна логіка - дозволяє
враховувати ризик статичного і динамічного сбоя.
6.2.1. Синхронне моделювання
Усі сигнали Про {0, 1}, усі затримки дорівнюють нулю. Стан елементів пам'яті за такт змінюється один раз. Стан системи описується:
yi(k) = fi[x1(k), ...xn(k), y1(k), ... ym(k)], i = 1, m
Вирішує, використовуючи засіб простій iтерацiї:
yi(p+1)(k) = fi[x(k), y1(p)(k), ... ym(p)(k)], i = 1, m
Iтерація діється до виконання умови:
yi(p+1)(k) = yi(p)(k) , i = 1, m
Цей засіб вимагає великих ресурсів, тому на практиці часто використовують засіб Зейделя:

При цьому, необхідно застосовувати ранжiровання. R=0- для вхідних сигналів. Але цей приклад для нагоди відсутності зворотних зв'язків.
Якщо при цьому: процес закінчений, якщо немає- знов перевіряємо умову. Одержуємо діаграму.
6.2.2. Асинхронне моделювання

- элемент затримки;
Zk - сигнал збудження, {Zk(k)} R;
Yk - сигнал реакції, {Yk(k)} P.
Асинхронне моделювання сводиться до обчислення функцій, що виконуються окремими елементами схеми. При цьому аргументи беруться з безлічі Р, а обчислені значення записуваються в масив R (збудження). Кожний розрахунковий такт відповідає одному такту роботи.
За цей такт сигнал минає на один елемент схеми наперед. Порядок обчислення Yk проiзволен, вихідні надані беруться з одного масиву і передаються в інший. Після кожного розрахунку діється пеЕАапис з масиву R в масив P, що і є iмiтація затримкі. Для обчислення скорочування застосовують собитійне моделювання. Для цього вводять масив А:
A(k) = 0 - якщо стан не змінюється
1 - якщо змінюється
6.2.3. Моделювання функціонально-логічних схем на основі трьохзначної логіки
З метою вияву можливості ризика сбою і критичних состязаній, в схемах з затримкою застосовується трьохзначна логіка.
Критични состязання - це наявність в схемах ряду елементів, що переключають пам'ять з ризиком сбою. Наприклад, розглянемо таблицю iстиностi:
x1 x2 x1 x2
|
x1\ x2 |
0 |
1/2 |
1 |
|
|
|
x1\ x2 |
0 |
1/2 |
1 |
|
0 |
0 |
0 |
0 |
|
|
|
0 |
0 |
1/2 |
1 |
|
1/2 |
0 |
1/2 |
1/2 |
|
|
|
1/2 |
1/2 |
1/2 |
1 |
|
1 |
0 |
1/2 |
1 |
|
|
|
1 |
1 |
1 |
1 |


= min (xi ), i = 1, m = max (xi), i = 1, m
X = 1–X
Моделювання трьохзначної логіки виробляється не тільки для вихідних Х, але і для перехідних сигналів.
A = {a1, ..., an} и
B = {b1, ... ,bm}, то будують:

C = {C1, ..., Cm}
Якщо f(A)=f(B) і f(C)=1/2, оте кажуть, що є ризик сбою. На основі трьохзначної логіки можна аналізувати критичні состязання, але при цьому зворотні зв'язки розривають і вводять ранжiровання як в асинхронному випадку. Якщо внаслідок аналізу визначимо, що сигнал дорівнює 1/2, то це означає, що є ризик сбоя.