

2. Машины переменного тока
Принцип действия машин переменного тока (синхронных и асинхронных) обусловлен взаимодействием вращающегося магнитного поля, создаваемого обмотками статора, с током ротора. Поэтому, прежде чем приступить к анализу электромагнитных процессов в машинах переменного тока, рассмотрим, как образуется вращающееся магнитное поле.
2.1. Получение кругового вращающегося магнитного поля
Круговым вращающимся магнитным полем называется поле, вектор результирующей магнитной индукции которого неизменен и вращается с постоянной угловой скоростью. Рассмотрим, как изменяется магнитное поле катушки, по которой протекает переменный ток (рис. 2.1):
![]()
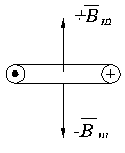
Рис. 2.1. К определению направления вектора НС катушки с переменным током.
Из рис. 2.1 видно,
что вектор магнитной индукции
![]() изменяется по величине от
изменяется по величине от
![]() до
до
![]() ,
но направление его неизменно.
,
но направление его неизменно.
Р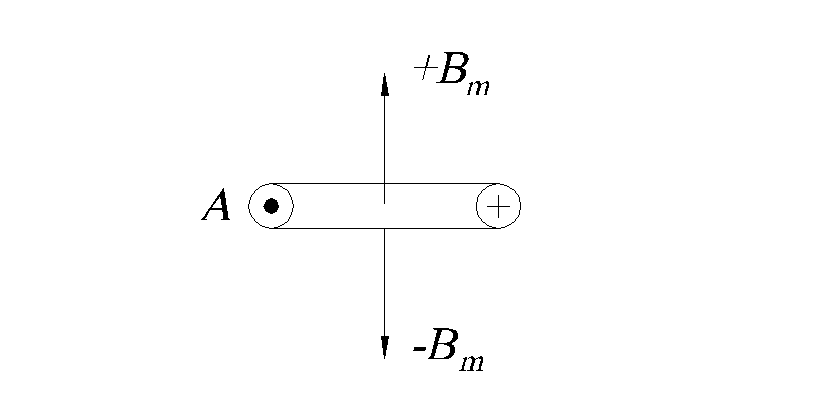
 ассмотрим,
как получить вращающееся магнитное
поле в двухфазной электрической сети
с помощью двух катушек А и В (рис. 2.2).
ассмотрим,
как получить вращающееся магнитное
поле в двухфазной электрической сети
с помощью двух катушек А и В (рис. 2.2).
Рис. 2.2. К получению кругового вращающегося магнитного поля в двухфазной электрической цепи.
Если оси двух
катушек
![]() и
и
![]() ,
сдвинутые в пространстве относительно
друг друга на 90 пространственных
градусов, обтекаются токами
,
сдвинутые в пространстве относительно
друг друга на 90 пространственных
градусов, обтекаются токами
![]() ;
;
![]() ,
(2.1)
,
(2.1)
то векторы магнитной индукции катушек сдвинуты относительно друг друга также на 90 электрических градусов.
Так как обе катушки совмещены в пространстве, то они создают магнитное поле, модуль вектора результирующей магнитной индукции которого будет равен

Рис. 2.3. К расчету модуля вектора результирующей магнитной индукции.
![]() ;
(2.2)
;
(2.2)
![]() ,
,
отсюда
![]() .
(2.3)
.
(2.3)
За один период изменения тока двухфазной питающей сети вектор результирующей магнитной индукции сделает один полный оборот:
![]() .
.
За
одну секунду результирующий вектор
магнитной индукции делает
![]() оборотов, а за 60 с. он сделает
оборотов, а за 60 с. он сделает
![]()
![]() .
.
Вращающееся
магнитное поле является круговым при
соблюдении следующих условий: сдвиг
катушек в пространстве на угол
![]() ;
сдвиг токов катушек во времени на угол
;
сдвиг токов катушек во времени на угол
![]() ;
равенство магнитодвижущих сил (МДС)
обмоток катушек. Нарушение любого из
условий образования кругового вращающегося
магнитного поля приводит к образованию
эллиптического поля, при котором конец
вектора результирующей магнитной
индукции описывает не окружность, а
эллипс (рис.2.4). В этом случае вектор
результирующей магнитной индукции
изменяется по амплитуде.
;
равенство магнитодвижущих сил (МДС)
обмоток катушек. Нарушение любого из
условий образования кругового вращающегося
магнитного поля приводит к образованию
эллиптического поля, при котором конец
вектора результирующей магнитной
индукции описывает не окружность, а
эллипс (рис.2.4). В этом случае вектор
результирующей магнитной индукции
изменяется по амплитуде.
Эллиптическое
поле можно представить как сумму двух
неравных по амплитуде круговых полей,
вращающихся с синхронной частотой
![]() в противоположные стороны.
в противоположные стороны.
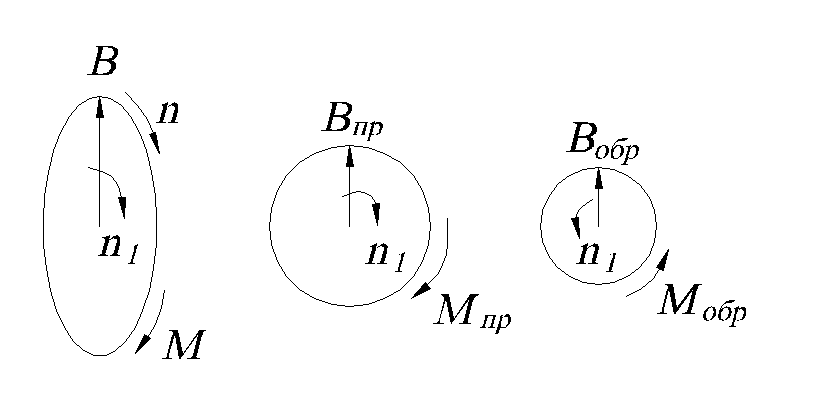
Рис.2.4. Образование эллиптического вращающегося магнитного поля.
Круговое
поле
![]() ,
вращающееся в одном направлении с
эллиптическим, называется прямым, а
второе поле
,
вращающееся в одном направлении с
эллиптическим, называется прямым, а
второе поле
![]() -
обратным.
-
обратным.
Прямое
поле создает вращающий момент двигателя
![]() ,
а обратное – тормозящий момент
,
а обратное – тормозящий момент
![]() .
С увеличением эллиптичности поля за
счет изменения углов сдвигов во времени
.
С увеличением эллиптичности поля за
счет изменения углов сдвигов во времени
![]() и в пространстве
и в пространстве
![]() или уменьшении магнитодвижущей силы
одной из обмоток статора прямая
составляющая поля и момента убывает, а
обратная – возрастает. Уменьшение
результирующего момента
или уменьшении магнитодвижущей силы
одной из обмоток статора прямая
составляющая поля и момента убывает, а
обратная – возрастает. Уменьшение
результирующего момента
![]() при неизменном моменте нагрузки приводит
к снижению частоты вращения ротора.
Когда полностью не выполняется хотя бы
одно из условий кругового поля, т. е.
при неизменном моменте нагрузки приводит
к снижению частоты вращения ротора.
Когда полностью не выполняется хотя бы
одно из условий кругового поля, т. е.
![]() ,
или
,
или
![]() ,
или
,
или
![]() ,
или
,
или
![]() ,
поле статора становится пульсирующим.
В этом случае двигатель не развивает
вращающего момента при неподвижном
роторе. Для объяснения этого явления
пульсирующее магнитное поле
,
поле статора становится пульсирующим.
В этом случае двигатель не развивает
вращающего момента при неподвижном
роторе. Для объяснения этого явления
пульсирующее магнитное поле
![]() можно заменить двумя полями
можно заменить двумя полями
![]() и
и
![]() ,
вращающимися в противоположные стороны
с синхронной частотой
,
вращающимися в противоположные стороны
с синхронной частотой
![]() .
Амплитуды этих полей равны половине
амплитуды пульсирующего поля.
.
Амплитуды этих полей равны половине
амплитуды пульсирующего поля.
При
неподвижном роторе оба поля вращаются
относительно ротора с одинаковой
частотой и скольжением. Каждое из них
наводит в обмотке ротора токи, равные
по амплитуде вследствие равенства полей
и скольжений. Возникают равные по модулю
вращающие моменты
![]() и
и
![]() ,
направление которых противоположно,
как и направление полей. Результирующий
момент равен нулю, поэтому ротор не
вращается.
,
направление которых противоположно,
как и направление полей. Результирующий
момент равен нулю, поэтому ротор не
вращается.
Таким
образом, изменяя форму поля от пульсирующего
через эллиптическое до кругового, можно
регулировать вращающий момент от нуля
при пульсирующем поле до максимального
при круговом. Соответственно частота
вращения ротора будет изменяться от
нуля при пульсирующем поле до максимальной
при круговом. Способ управления,
основанный на изменении амплитуды
напряжения управления
![]() ,
называется амплитудным, на изменении
угла
,
называется амплитудным, на изменении
угла
![]() - фазовым, на изменении угла
- фазовым, на изменении угла
![]() - пространственным. Последний способ
применим только для двигателей специальной
конструкции, позволяющей поворачивать
обмотки возбуждения (
- пространственным. Последний способ
применим только для двигателей специальной
конструкции, позволяющей поворачивать
обмотки возбуждения (![]() )
и управления (
)
и управления (![]() )
относительно друг друга.
)
относительно друг друга.
Рассмотрим теперь получение кругового вращающегося магнитного поля в трехфазной электрической цепи.
Возьмем три одинаковые катушки с токами:
![]() .
.
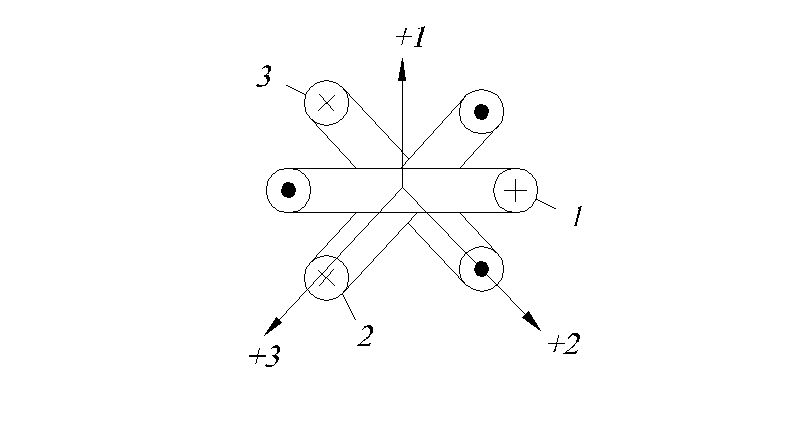
Рис.2.5. К образованию кругового вращающегося магнитного поля в трехфазной цепи.
П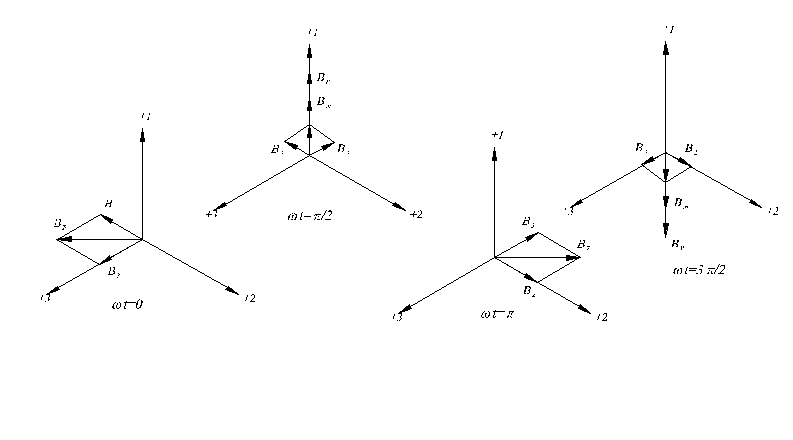 оложительные
направления осей катушек обозначим как
оложительные
направления осей катушек обозначим как
![]() .
Индукцию первой катушки обозначим
.
Индукцию первой катушки обозначим
![]() ,
второй-
,
второй-![]() ,
третьей -
,
третьей -![]() .
Построим вектор результирующей индукции
для моментов времени
.
Построим вектор результирующей индукции
для моментов времени
![]() (рис.2.6).
(рис.2.6).
![]()
Рис.2.6.
Вращение вектора результирующей
магнитной индукции![]() .
.
Вектор
результирующей магнитной индукции
равен
![]() и вращается с постоянной угловой
скоростью
и вращается с постоянной угловой
скоростью
![]() в сторону катушки с отстающим током.
Если ток
в сторону катушки с отстающим током.
Если ток
![]() пропустить по третьей катушке, а ток
пропустить по третьей катушке, а ток
![]() по второй, то направление вращения
вектора результирующей магнитной
индукции изменится на обратное.
по второй, то направление вращения
вектора результирующей магнитной
индукции изменится на обратное.
С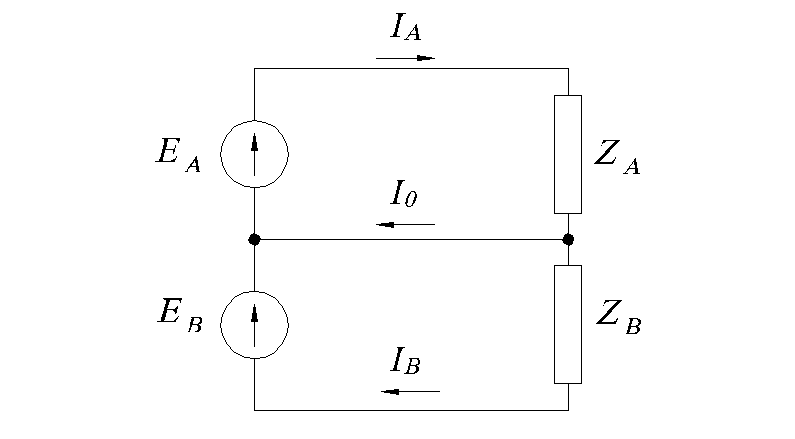 равним
двухфазную (рис.2.7а) и трехфазную
(рис.2.7б) электрические цепи.
равним
двухфазную (рис.2.7а) и трехфазную
(рис.2.7б) электрические цепи.
а)
![]()
![]()

б)
![]()
Рис.2.7. Распределение токов в двухфазной (а) и трехфазной (б) электрических цепях.
При
симметричной нагрузке
![]() в двухфазной и трехфазной системе
необходимо иметь три провода. Но в
трехфазной системе все три провода
обтекаются одинаковым током
в двухфазной и трехфазной системе
необходимо иметь три провода. Но в
трехфазной системе все три провода
обтекаются одинаковым током
![]() ,
а в двухфазной через третий провод
протекает ток в
,
а в двухфазной через третий провод
протекает ток в
![]() раз больше фазного тока. Поэтому сечение
этого провода должно быть больше. Кроме
того, магнитная индукция вращающегося
магнитного поля в трехфазной системе
в 1,5 раза выше. По этим причинам двухфазный
ток применяется только в специальной
аппаратуре.
раз больше фазного тока. Поэтому сечение
этого провода должно быть больше. Кроме
того, магнитная индукция вращающегося
магнитного поля в трехфазной системе
в 1,5 раза выше. По этим причинам двухфазный
ток применяется только в специальной
аппаратуре.