

Системы мобильного картографирования
Используемое на западе название «системы мобильного картографирования» СМК является дословным переводом англоязычного термина «mobile mapping systems». Иногда также в западной литературе используется термин «mobile mapper». Его можно не вполне корректно перевести как «мобильный картограф». И в том и в другом случае используемые названия нельзя признать удачными, по крайней мере, они никак не вписываются в отечественную традицию, которая уже на уровне терминологическом четко разграничивает работы по топографо-геодезической съемке и по составлению карт. В нашем российском понимании это безусловно связанные, но ни в коем случае не тождественные виды деятельности.
Такая неопределенность, а местами и путаница вокруг понятий «карта», «картография» и других, объясняется специалистами двумя главными причинами:
-
Успехи цифровых технологий в фотограмметрии, картографии, появление и широкое распространения геоинформационных систем, общедоступных данных космического и авиационного дистанционного зондирования, значительно снизили порог технологической сложности создания как собственно топографических (в традиционном понимании) карт, так и многочисленных подобных продуктов. Эти продукты не являются, строго говоря, картами, но несут в себе многие их родовые признаки. Здесь речь идет о цифровых ортофотопланах, фотокартах, навигационных картах-схемах, «цифровых картах», цифровых моделях рельефа и местности и др. Несмотря на предпринимаемые попытки стандартизировать данные категории или хотя бы систематизировать и добиться единообразия в трактовке этих терминов, необходимой строгости в их использовании пока нет. Как следствие, термин «карта» («map») в своем наиболее общем значении — уменьшенное подобное, координированное и формализованное представление земной поверхности и объектовой среды — остается самым приемлемым и не вызывающим возражения.
-
0бщая коммерциализация современной нашей жизни не обошла стороной и картографо-геодезическую сферу. В значительной степени размыты границы между чисто рекламной (то есть коммерческой), научно-популярной и научно-технической литературой. Большинство печатных материалов представляют собой некоторую их смесь.
С учетом этих замечания будем рассматривать СМК, как сложный топографо-геодезический инструмент, включающий в себя информационно-измерительные и вычислительные средства, самодвижущуюся платформу, а также совокупность программных и методических средств, предназначенных для выполнения топографической съемки земной поверхности.
Главной отличительной чертой СМК, как средства топографической съемки, является наличие в ее составе сканирующего лазерного дальномера (лазерного сканера), а также возможность работы в динамическом режиме, то есть в процессе движения платформы. Последнее обстоятельство существенным образом отличает методологию выполнения съемки СМК от съемки с использованием традиционных наземных лазерных сканеров в статическом положении. По этой причине в России существует ещё одно название – Мобильные Сканирующие Системы (МСС), которое подчёркивает динамический характер инструмента данной съёмки, в принципе, это название можно отнести как к наземному, так и к воздушному лазерному сканированию.
Создание наземных мобильных сканирующих систем является дальнейшим развитием технологии наземного лазерного сканирования за счёт фактической модернизации и внедрения основных элементов технологии воздушного лазерного сканирования (ВЛС), направленными на увеличение производительности, повышение качества и комфортности проведения полевых и камеральных работ. Только в качестве движущейся платформы здесь используются наземные средства передвижения: автомобили, железнодорожные дрезины и локомотивы, речные и морские суда, причем в современных моделях рабочая скорость движения платформы достигает магистральной скорости в 100 км/ч.
Сбор пространственной информации с помощью мобильного лазерного сканера был бы невозможен без интегрального объединения и совместной обработки трех потоков данных:
-
GPS —траектория движения платформы,
-
Position and Orientation System (POS) — угловая ориентация платформы,
-
LIDAR - дальномерных лазерных измерений.
Рисунок 1
Обновление 20 Гц
Обновл. 500 Гц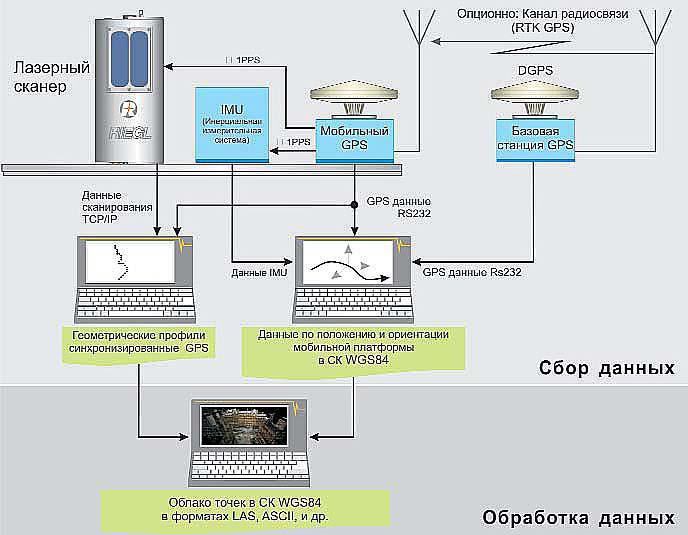
На рисунках 1 мы видим схему получения исходных данных и их обработку.
-
Бортовой GPS приемник регистрирует траекторию движения автомобиля. GPS данные подвергаются дифференциальной коррекции на основе данных неподвижной базовой GPS станции. Спутниковые данные обновляются с частотой 2 - 20 Гц,
-
Инерциальная система обеспечивает измерение и регистрацию параметров угловой ориентации платформы. Инерциальные данные обновляются с частотой от 200 до 500 Гц, т.е. значительно чаще, чем спутниковые, но имеют дрейф;
-
Лазерные импульсы отражаются от поверхности земли, зданий, объектов инфраструктуры и др., регистрируются приемником излучения и преобразуются в цифровую форму.
-
Продольная развертка осуществляется за счет движения платформы.
-
Каждый из сканеров реализует развертку и при отсутствии препятствий обеспечивает получение съемочных данных в с радиусом, который доступен для данной модели, например до100 м (модель VI00), до 200 м (модель V200) или 300 м для системы StreetMapper 360.
Для того чтобы объединить отдельные «облака точек», полученные в движении, в единое «облако точек» в заданной системе координат, например, в WGS-84, наземные лазерные сканеры объединены с интегральным навигационным комплексом GPS/IMU, включающем спутниковый навигационный приемник GPS и инерциальную систему [3]. Такой комплекс позволяет определять положение и ориентацию мобильной платформы, на которой устанавливается наземный лазерный сканер, в геоцентрической системе координат WGS-84.
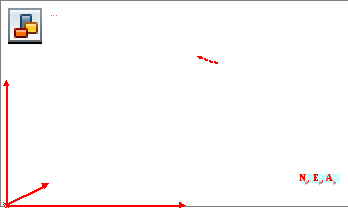
П ринципиальную
схему согласования данных инерциальной
и спутниковой навигационной систем и
процесс исключения влияния дрейфа
гироскопов и акселерометров блока IMU
можно показать на примере коррекции
траектории, спроектированной на
координатную плоскость OXZ
(рис. 2):
ринципиальную
схему согласования данных инерциальной
и спутниковой навигационной систем и
процесс исключения влияния дрейфа
гироскопов и акселерометров блока IMU
можно показать на примере коррекции
траектории, спроектированной на
координатную плоскость OXZ
(рис. 2):
-
в точках A, B, C, D, E и F, где выполнены спутниковые и инерциальные измерения, реальная траектория (3) совпадает с траекториями, вычисленными по данным инерциальных (1) и спутниковых (2), что обусловлено «сбросом» влияния накопленного к этому моменту дрейфа акселерометров и гироскопов;
-
по мере удаления от точек спутниковых измерений точки проекции траектории, найденной по данным инерциальных измерений, все более удаляются от реальной (3), и в итоге по данным IMU будут получены фрагменты траектории AB′, BC′, CD′ DF′ (1);
-
в процессе послеполетной обработки (постобработки) данных инерциальных и спутниковых измерений:
-
точки B′, C′, D′, F′ фрагментов (1) совмещаются с точками спутниковых измерений B, C, D, F;
-
фрагменты (1) траектории AB′, BC′, CD′ и DF′ разворачиваются вокруг начальных точек A, B, C, D, в результате чего преобразуются во фрагменты траектории AB, BC, CD и DF (4) соответственно, и оказываются в непосредственной близости от фактической траектории.
Разумеется, приведенная интерпретация несколько условна, но она отражает принцип согласования результатов инерциальных и спутниковых данных, дает ключ к пониманию причин относительно невысокой их точности в реальном режиме и объясняет необходимость постобработки.
Данные лазерного сканирования, полученные с помощью МСС, представляют собой «облака точек» с определенным количеством одиночных лазерных измерений. Каждое одиночное лазерное измерение имеет собственную временную метку в формате UTC или GPS-времени. Для синхронизации данных сканирования используются данные спутникового приемника GPS, а для коррекции мгновенных изменений положения мобильной платформы — данные инерциальной системы.
 Очевидно,
что
технология, в
плане
конструктивных
решений,
имеет
много
общего
с методом
воздушного
лазерного
сканирования
(Рис.3). С чисто математической точки
зрения в СМК используется абсолютно
аналогичный принцип измерения, что и в
других приборах, относящихся к категории
«лазерные сканеры» или другое название
«лазерные локаторы» или «лидары».
Обратимся к рисунку 3.
Очевидно,
что
технология, в
плане
конструктивных
решений,
имеет
много
общего
с методом
воздушного
лазерного
сканирования
(Рис.3). С чисто математической точки
зрения в СМК используется абсолютно
аналогичный принцип измерения, что и в
других приборах, относящихся к категории
«лазерные сканеры» или другое название
«лазерные локаторы» или «лидары».
Обратимся к рисунку 3.
Векторные пространства, образованные системой координат СК ONEA и сканерного блока СК OXYZ, обозначим соответственно через G и S. Положение любой точки в указанных пространствах будем характеризовать векторами g и s.
Переход из одной трёхмерной СК в другую осуществляется на основе матрицы третьего порядка АGS и вектора, определяющего начало одной СК в другой СК. Матрица АGS может быть определена через величины направляющих косинусов, т. е. через разложение орт СК сканера OXYZ по базису обобщённой СК ONEA, определяемые по известным формулам аналитической геометрии по трём углам ориентирования.
 (
)
(
)
На основании уравнения (11.15) выполняется расчет всех координат лазерных точек
![]() =
=
![]() +
+![]()
![]() (
( -
-![]() ).
(11.15)
).
(11.15) ![]() -
вектор в пространстве G
, координаты которого определяются
непосредственно GPS измерениями.
-
вектор в пространстве G
, координаты которого определяются
непосредственно GPS измерениями.
Вектор s на этом рисунке соответствует зондирующему лучу, а его длина s соответствует измеренному значению наклонной дальности. Текущее положение определяется параметром - фазой сканирования. При выводе уравнения дальномерного измерения учтено, что xS = 0; yS = s sin(); zS = s cos(). Возможны другие варианты конструкций.
Здесь через
![]() обозначен вектор в СК сканера, определяющий
местоположение антенны. Этот, чрезвычайно
важный в метрологическом отношении
вектор, имеет двойное значение:
обозначен вектор в СК сканера, определяющий
местоположение антенны. Этот, чрезвычайно
важный в метрологическом отношении
вектор, имеет двойное значение:
-
С его помощью можно полностью записать уравнение связи для сканерного блока и, следовательно, корректно интерпретировать результаты сканирования в процессе постобработки.
-
Точное знание вектора
 является абсолютно необходимым условием
корректной работы навигационного
компьютера по интегрированию GPS и IMU
данных для получения навигационного
решения.
является абсолютно необходимым условием
корректной работы навигационного
компьютера по интегрированию GPS и IMU
данных для получения навигационного
решения.
Наземная мобильная система имеет существенно более низкую стоимость по сравнению с воздушной за счет использования различных типов наземных лазерных сканеров, которые на порядок дешевле воздушных лазерных сканирующих систем. Кроме того, наземное мобильное лазерное сканирование, в отличие от метода ВЛС, не требует аренды дорогостоящих летательных аппаратов, кроме того, нет такой зависимости от погоды как у ВЛС.
Существует еще одно важное отличие — наземные мобильные сканирующие системы можно использовать непосредственно в населенных зонах, так как применяемые в них наземные лазерные сканеры безопасны для зрения. По аналогии с ВЛС логично было бы назвать этот метод съёмки - Наземное Мобильное Лазерное Сканирование (НМЛС) и в отличии от статичного Наземного Лазерного Сканирования (НЛС). Для сокращенного названия «ВЛС» нет необходимости включать «М» - мобильное, так как другого способа в этом случае нет.
Сложный инструмент, которым являются мобильные сканирующие системы (МСС) интересен и универсален настолько, что самим фактом своего появления определил целый метод топографо-геодезической съемки, с присущими только ему технологическими приемами работы в полевых и камеральных условиях, характером выходных данных, средствами метрологического обеспечения и т.д.
О сновной
областью применения НМЛС являются
объекты городской инфраструктуры и
архитектуры, а также протяженные линейные
объекты, такие как линии электропередачи,
автомобильные и железные дороги,
аэродромы, трубопроводы, береговая
линия и пр. НМЛС используется не только
для создания новых и обновления
существующих топографических карт и
планов крупных масштабов, но и для
решения разнообразных инженерно-геодезических,
изыскательских, землеустроительных,
электроэнергетических, лесотехнических
и других задач.
сновной
областью применения НМЛС являются
объекты городской инфраструктуры и
архитектуры, а также протяженные линейные
объекты, такие как линии электропередачи,
автомобильные и железные дороги,
аэродромы, трубопроводы, береговая
линия и пр. НМЛС используется не только
для создания новых и обновления
существующих топографических карт и
планов крупных масштабов, но и для
решения разнообразных инженерно-геодезических,
изыскательских, землеустроительных,
электроэнергетических, лесотехнических
и других задач.
Модуль мобильной системы лазерного
картографирования представляют собой
единую платформу, жестко установленную
на крышу стандартных транспортных
средств. В нем размещены один или
несколько лазерных сканеров с углом
обзора до 360 градусов, GPS и инерциальной
системой (Рис.3) Кроме того, такие системы
комплектуются цифровыми фотоаппаратами.
При начале движения автомобиля сканеры
и фотокамера начинают свою работу, в
результате чего на экране компьютера
мы видим получаемые от них данные. Это
очень наглядно, оператор сразу имеет
возможность оценить степень достаточности
получаемых данных и наличие мертвых
зон в тех или иных местах (рис.4). На случай
остановки система может прекратить
сбор данных и возобновить его при
продолжении движения.
Рис. 4. Типичное место оператора
StreetMapper
360 Указанные
системы п
Указанные
системы п
|
Скорость км / час |
25 |
40 |
60 |
80 |
100 |
|
Плотность, точек / м2 |
1440 |
900 |
600 |
450 |
360 |
Данные, накопленные за один час съемки, могут быть полностью обработаны в течение 1 часа.
Технология лазерной съемки достигла такой ступени развития, когда она позволяет формировать графические изображения исключительного качества, насыщенные структурными и топографическими деталями. В отличие от фотографий, и плоских изображений, получаемые данные на основе лазерного сканирования, являются трехмерными по своей природе, не требуют ортотрансформирования и могут быть получены в ночное время. Работа лазера не зависит от окружающего освещения, что является существенным для мобильной наземной съемки, поскольку сканирование можно проводить ночью, когда движение минимально.