

-
Стандартные формы записи дифференциального уравнения звена.
(2.10)
Для представления уравнения (2.10) в первой стандартной форме записи, разделим все его коэффициенты на коэффициент при выходной координате (на a2), введя обозначения:

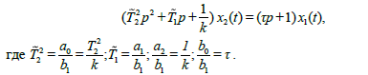
Тогда дифференциальное уравнение звена (2.10), записанное в первой стандартной форме принимает вид:
![]()
Уравнение вида x2=kx1 будет являться уравнением статического режима этого звена.
Если все коэффициенты уравнения (2.10) разделить на коэффициент при входной величине b1, то получим так называемую вторую стандартную форму записи дифференциального уравнения звена:
Для составления общего уравнения САУ уравнение каждого от- дельного динамического звена записывается в специальной форме.
Рассмотрим динамическое звено (рис. 2.2):
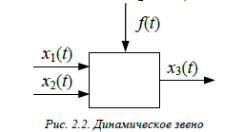
При этом в левой части уравнения записываются все внутренние координаты системы управления со своими дифференциальными операторами; справа- внешние воздействия для системы в целом.
![]()
В ряде случаев отличие от линейности бывает столь незначительным, что даже в сравнительно большом диапазоне отклонений Δхi можно считать систему линейной. В случае же ярко выраженной нелинейной зависимости, линеаризация будет справедлива лишь на соответствующем более узком участке отклонений Δхi. Линеаризация может быть совершенно недопустимой при скачкообразных зависимостях (релейные характеристики, сухое трение), такого рода зависимости называются нелинейными.
-
Передаточные функции системы автоматического управления.
Понятие передаточной функции динамического звена связано с операционным методом решения дифференциальных уравнений, основанном на применении преобразования Лапласа-Карсона.
Преобразованием Лапласа называют соотношение:
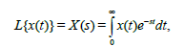
где x(t) – оригинал; X(s) – изображение, ставящее функции x(t) вещественного переменного t в соответствие функцию X(s) комплексной переменной s (s = σ + jω).
Преобразование Карсона имеет вид:

![]()
Примеры преобразований:
-
Свойства передаточной функции динам звена (системы).
1. Передаточная функция линейного звена (системы) с постоянными параметрами является дробно рациональной функцией переменной преобразования Лапласа-Карсона комплексной переменной s = σ + jω.
2. Все коэффициенты b0 ÷ bm и a0 ÷ an полиномов числителя и знаменателя передаточной функции вещественны, т. к. они являются функциями от параметров САУ, которые могут быть только вещественными.
3. Невещественные нули и полюсы передаточной функции могут быть только комплексно-сопряженными.
4. Количество передаточных функций, которыми описывается звено с одной выходной координатой, равно числу его входов. Если звено (система) имеет несколько входов, то оно описывается количеством передаточных функций, равным количеству входов (рис. 2.9); при определении передаточной функции относительно какой-либо одной входной величины другие входные величины условно полагают равным нулю (согласно принципу суперпозиции).
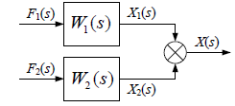
Рис. 2.9. Динамическое звено с двумя входными и одной выходной координатами