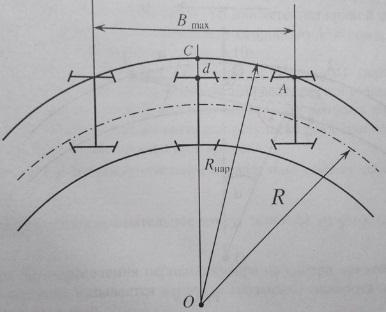
19 Максимальная база экипажа
Максимальная база – база экипажа, при которой она еще вписывается в кривую заданного радиуса.
![]()
![]()
![]()
![]() ,
м
,
м
![]()
![]()
![]()
![]()
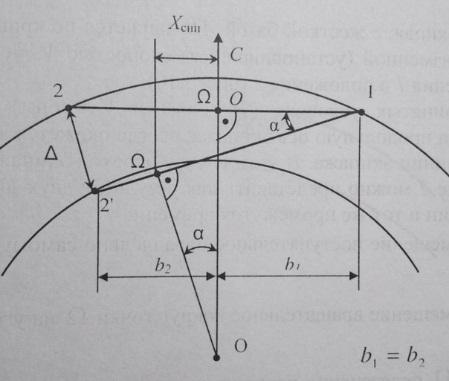
Положение экипажа в кривой при его движении.
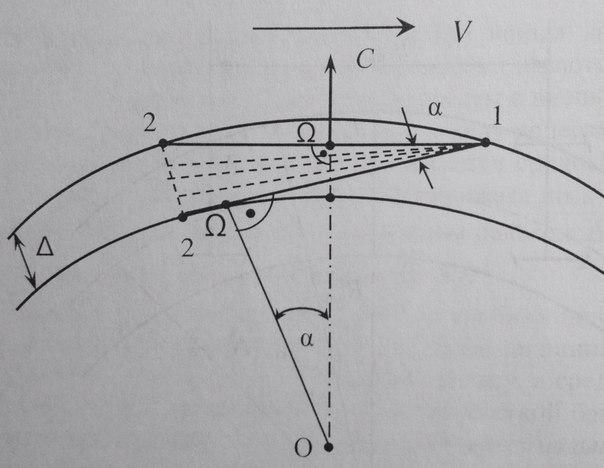
При принятом направление движения в зависимости от скорости ( величины центробежной силы С ) первая колесная пара является набегающей ( направляющей ) поэтому будет всегда прижата к внешнему рельсу.
Последняя по ходу колесная пара ( точка 2 ) в зависимости от скорости движения может быть также прижата к внешнему рельсу расположившись по хорде, либо занять положение когда она окажется прижатой к внутреннему рельсу.
Первое положение экипажа называется хордовым (положение высоких скоростей, а второе наибольшим перекосом ( положение малых скоростей ). Между этими двумя крайними положениями теоретически может быть множество промежуточных соответствующих различным скоростям движения ( показаны пунктиром ).
Понятие о центре поворота экипажа при его движении по кривой
(.)Ω – пересечение перпендикуляров из центра кривой с продольной осью экипажа называется центром (полюсом) поворота экипажа при его движении в кривой.
Наибольшего перекоса
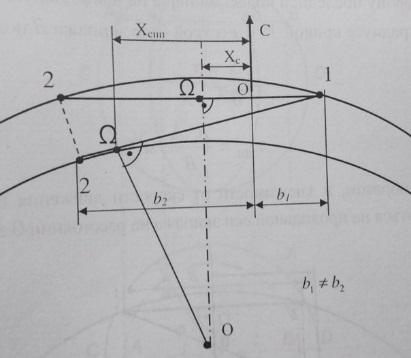
Хордовое положение:
![]()
В
зависимости от скорости движения центр
поворота может находится на продольной
оси экипажа
![]()
У экипажей с малой базой в кривой значит. радиуса центр поворота может оказаться за пределами базы. И так при хордовом торможении хс=0, а при наибольшем перекосе хс=хснп.
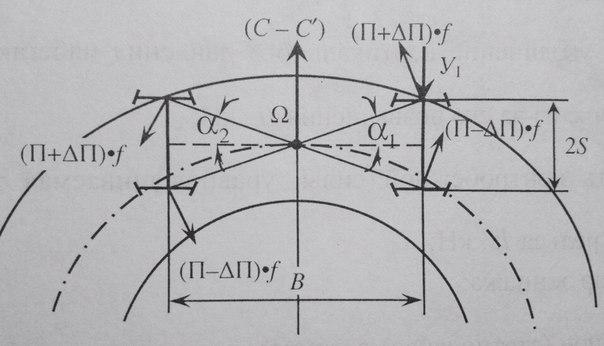
20 Определение направляющего усилия, действующего на набегающую колесную пару
Расчетная схема
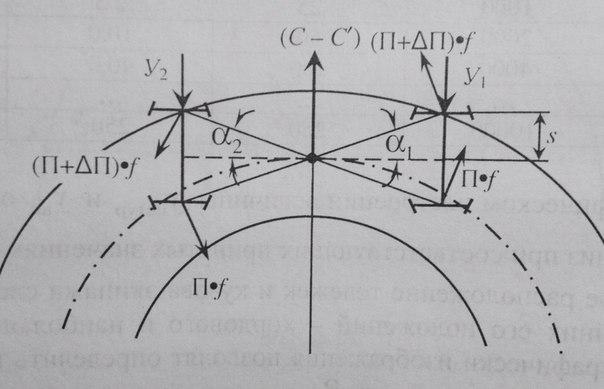
Составим уравнения равновесия сил, действующих на первую (направляющую) колесную пару: Y₁ –(C-C’)-(П+∆П)*f*cosλ₁=0
Отсюда находим Yн=Y₁=(C-C’)-(П+∆П)*f*cosλ₁=0 где C=mV^2/2R –центробежная сила, кН;
m-масса жкипажа, т;
V- скорость, м/c;
R-радиус кривой, м.
![]() где
B- база тележки,м, 2S=1.6-расстояние между
кругами катания колес,м;
hc-
высота центра тяжести экипажа над
уровнем головок рельсов,м; h- возвышение
внешнего рельса,м.
где
B- база тележки,м, 2S=1.6-расстояние между
кругами катания колес,м;
hc-
высота центра тяжести экипажа над
уровнем головок рельсов,м; h- возвышение
внешнего рельса,м.
![]() увеличение вертикального давления
набегающего колеса на внешний рельс
изза его возвышения h,
кН;
увеличение вертикального давления
набегающего колеса на внешний рельс
изза его возвышения h,
кН;
![]() – часть центробежной илы , уравновешиваемая
за счет возвышения внешнего рельса h
,кН; n-число колесных пар экипажа
– часть центробежной илы , уравновешиваемая
за счет возвышения внешнего рельса h
,кН; n-число колесных пар экипажа
![]() –номинальное вертикальное давление
набегающего колеса на внешний
рельс,кН;
f=0.25 –коэффициент трения
между колесом и рельсом.
После
подстановки указанных значений в
выражение для Yн=Y1
и некоторых преобразований получим:
–номинальное вертикальное давление
набегающего колеса на внешний
рельс,кН;
f=0.25 –коэффициент трения
между колесом и рельсом.
После
подстановки указанных значений в
выражение для Yн=Y1
и некоторых преобразований получим:
![]() с
учетом возвышения наружного рельса,
т.е. при
с
учетом возвышения наружного рельса,
т.е. при ![]() Соответственно
без учета возвышения наружного рельса,
т.е. при
Соответственно
без учета возвышения наружного рельса,
т.е. при ![]() (написать).
Необходимо
помнить, что полученные выражения для
Yн
справедливы только для хордового
положения экипажа, когда xc=0
и α1
= α2
=α.
(написать).
Необходимо
помнить, что полученные выражения для
Yн
справедливы только для хордового
положения экипажа, когда xc=0
и α1
= α2
=α.
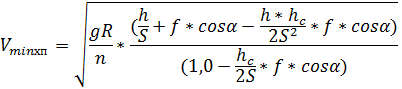
21 Определение скорости начала хордового положения экипажа
Рассмотрим момент времени, когда экипаж уже занял хордовое положение, но Y2= 0.
Расчетная схема
Уравнение сил, действующих на заднее колесо, имеет вид
(П+∆П)*f*cosα=C-C’
Где
![]()
![]()
После подстановки исходных данных получаем уравнение вида
![]()
После преобразований получим:
![]()
При учете возвышения наружного рельса (h=/=0):
Без учета возвышения внешнего рельса (h= 0) (написать).
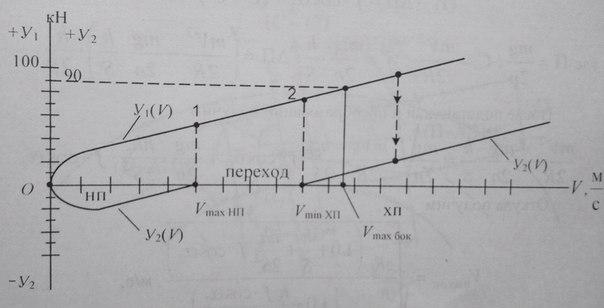
При всех скоростях Vхп≥Vminхп положение экипажа в кривой заданного радиуса будет оставаться хордовым.
Подставляя последовательно выбранные значения V > Vminхп в выражения для Y1 полученные для хордового положения, найдем величины Y1 при этих V.
Значения Y2 при этих же значениях V получим, решая уравнение сил хордового положения экипажа: Y1-Y2=C-C’, откуда Y2=(C-C’)-Y1