33. Динамика тягового привода II класса с учетом вертикальных перемещений рамы тележки.
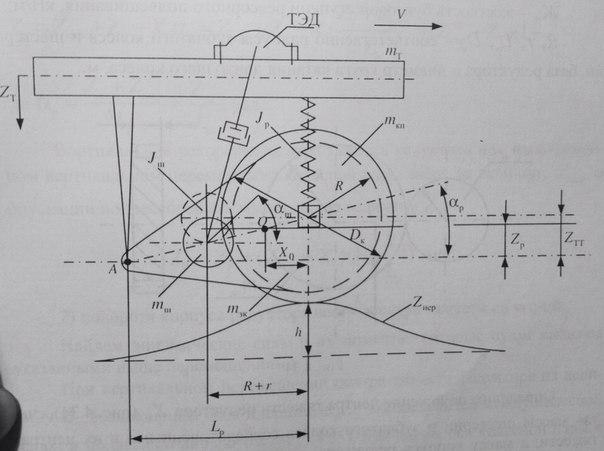
Определим положение центра тяжести редуктора:
![]()
Тогда поворот корпуса редуктора на угол αp можно представить как результат двух движений:
1) Вертикального перемещения центра его тяжести вверх на величину
![]() где
Zт
-
перемещение центра тяжести.
где
Zт
-
перемещение центра тяжести.
2) Поворота корпуса редуктора вокруг центра тяжести на угол αp
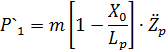
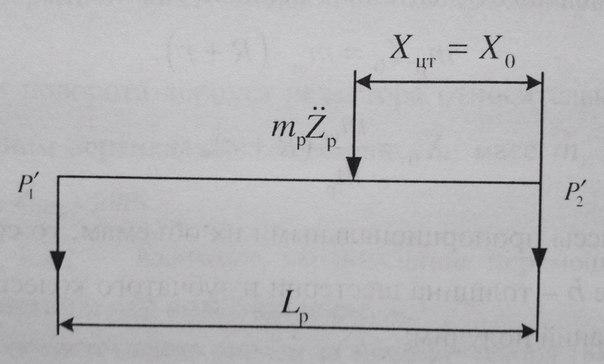
При вертикальном перемещении центра тяжести редуктора на величину Zp, возникающая сила инерции mpZp.. распределится между колесной парой и подвесным аппаратом, причем на ось колесной пары в плоскости зубчатого колеса будет действовать сила :
При
повороте корпуса редуктора на угол αp
происходит
поворот на угол ![]() под действием вертикальной силы Zд
,
возникающий в зацеплении (см. рис.)
под действием вертикальной силы Zд
,
возникающий в зацеплении (см. рис.)
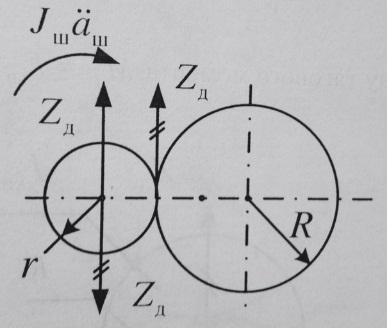
Величина этой силы:

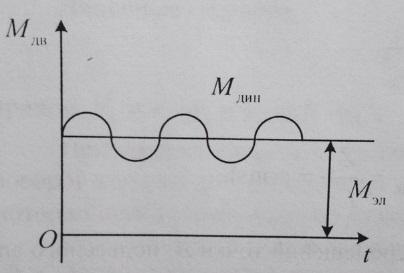
Сила Zд через зубчатое зацепление действует на зубчатое колесо с динамическим моментом:
![]()
Таким образом можно сделать след-е выводы:
1) Результирующая максимальная вертикальная сила:
![]()
2) На подвесной аппарат действуют результирующая вертикальная сила:
![]()
34 Силы, возникающие при работе тягового привода III класса
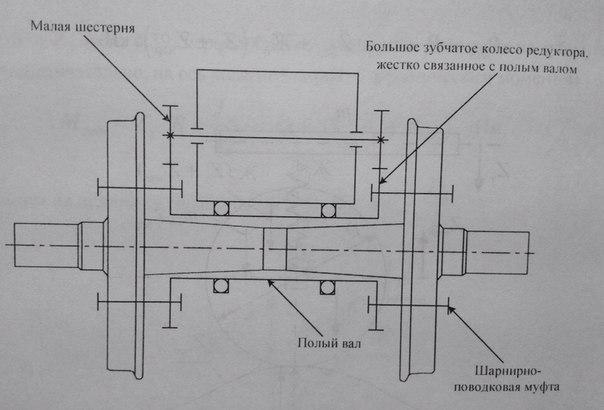
Опорно-рамное подвешивание тягового двигателя и редуктора. Передача момента от вала якоря к КП осуществляется посредством полого вала, охватывающего ось КП и 2ух шарнирно-поводковых муфт. Перемещение рамы тележки относительно оси КП обеспечивается зазором между осью и полым валом.
Расчетная схема тяг.привода 3 класса.
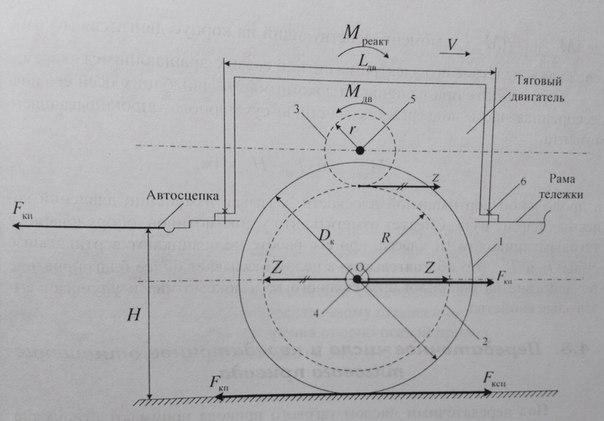
Lдв, Dk,R, r-база двигателя, диаметр круга катания движущего колеса, радиусы зубчатого колеса и шестерни, м
Н- высота оси автосцепки над уровнем головок рельсов, м
О- центр оси КП и зубчатого колеса
1 Движущее колесо 2 Зубчатое колесо, посаженное на вал 3 Шестерня редуктора, посаженная на вал якоря 4 Полый вал, установленный и вращающийся в подшипниках корпуса тяг.двигателя 5 Вал якоря тяг.двигателя 6 Крепление тяг.двиг. к раме тележки
Вращающий момент касательных сил на оси КП.
Mкп=Fкп*Dk/2, где Fкп – касательная сила на ободе движущего колеса
К полому валу приложена сила Z, направленная направо. Нормальное качение колеса по рельсу без проскальзывания: Fкп≤Fксц. Если Fкп>Fксц, возникают условия для боксования. Fкп, приложенная к оси КП, через боксовый узел , раму тележки и автосцепку, передает усилие поезду, обеспечивая его поступательное движение. Надрессорное строение локомотива подвергается действию опрокидывающего момента.
![]()
│Мреакт│=│Мдв│- момент, действующий на корпус двигателя из-за его электромагнитной связи с вращ. Якорем. При наличии на локо n движущих осей его подрессоренная часть подвергается- Мопр=n*Fкп*Н, кНм, в продольной вертикальной плоскости, вызывая изм давлений КП на путь.
35 Передаточное число и передаточное отношение тягового привода
Передаточное число – отношение диаметра большого зубчатого колеса к диаметру шестерни, на валу якоря ТЭД.
![]()
![]() -число
зубьев большого зубчатого колеса и
шестерни
-число
зубьев большого зубчатого колеса и
шестерни
Передаточное отношение-отношение числа оборотов или угловых скоростей вала якоря ТЭД и оси колёсной пары
![]()
При изменении V, сопровождающейся вертикальными колебаниями подресс массы тележки на валу якоря возникает динамический момент, который созд доп нагрузку на элементы привода и на КП, ухудшая тяговые и динамические хар-ки. Его появление свидетельствует о несовершенстве данного типа привода по передаточному отношению.
![]()
Рассмотрим опорно-осевой привод
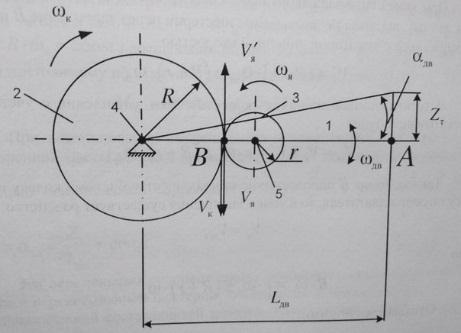
1-корпус ТЭД 2-зубчатое колесо 3-шестерня редуктора 4-ось колёсной пары 5-вал ТЭД А-связь 1 с кронштейном поперечного крепления рамы тележки В-точка зацепления зубчатого колеса и шестерни
Для передаточного отношения тяговой передачи:
![]()
wк wдв – угловые скорости поворота оси КП и корпуса двигателя.
![]()