

38 Коэффициент использования сцепного веса двухосного электровоза с опорно-осевым тяговым приводом
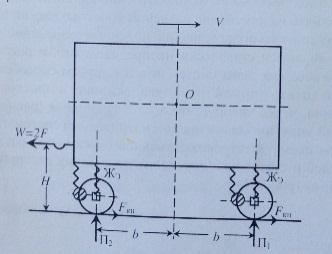
Изменение давление КП на путь являются результатом действия сил, приложенных к надрессорному строению и передающихся через рессорное подвешивание на колесные пары. Суммируясь с силами , действующими на колесную пару со стороны тягового привода, они и определяют итоговое изменение давления колесных пар локомотива на путь.
К статически определимым относятся системы рессорного подвешивания следующих типов электровозов:
1 Рамные эл.возы с числом эквивалентных точек подвешивания не более 4х на весь эл.воз или не более 2х на одну его сторону, не более 2х групп продольно сбалансированных осей
2 Тележечные эл.возы с несочлененными тележками с числом эквивалентных точек не более четырех в каждой из тележек на обе стороны
3 Эл.возы с двумя сочлененными тележками с числом эквивалентных точек подвешивания не более шести в двух тележках на обе стороны или не более 3х групп продольно сбалансированных осей в двух тележках.
Системы рессорного подвешивания не удовлетворяющие указанным выше условиям, являются статически не определимыми( расчет с исп-т центра упруг)
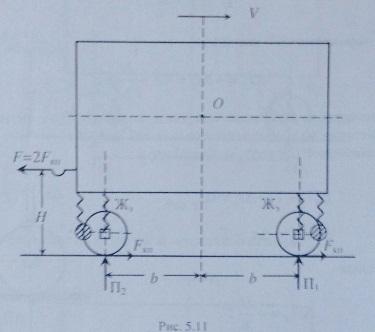
При реализации силы тяги на надрессорное строение действуют силы Fэл (на оси автосцепки) и T(над каждой из осей)
INCLUDEPICTURE
"https://pp.vk.me/c622230/v622230906/3b1ac/eQRWJdpy-8M.jpg"
\* MERGEFORMATINET INCLUDEPICTURE
"https://pp.vk.me/c622230/v622230906/3b1ac/eQRWJdpy-8M.jpg"
\* MERGEFORMATINET INCLUDEPICTURE
"https://pp.vk.me/c622230/v622230906/3b1ac/eQRWJdpy-8M.jpg"
\* MERGEFORMATINET
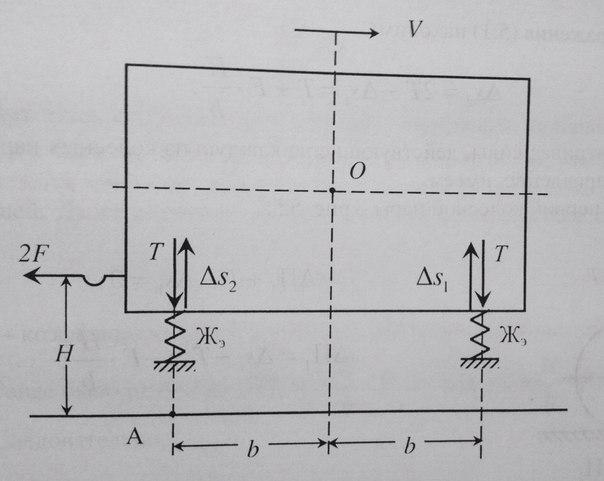
Уравнение равенства суммы сил и реакций в условиях равновесия
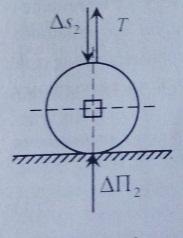
∑Y=0; ∆s1+Δs2 – 2T = 0 ∆s2 = 2*T – Δs1
Уравнение моментов
∑МА=0 ∆s1*2b+2FH – T*2b=0 Δs1=T-F*H/b
Рассматривая силы, действующие на каждую из колесных пар и учитывая их направления
а для первой колесной пары ∆П1+T – Δs1=0 ∆П1=-F*H/b
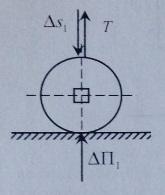
б для второй колесной пары ΔП2+ Т - ∆s2 = 0 ΔП2=+F*H/b
Так как при реализации силы тяги полный вес локомотива остается неизменным, а происходит лишь его перераспределение между отдельными колесными парами, часть из которых догружается, а оставшаяся часть – разгружается, то сумма полученных изменений давлений колесных пар на путь в пределах всего локомотива должна быть равной нулю . ∑∆П1=0
Коэффициент использования сцепного веса ἐ = 1 - £*ψ где £=H/b - коэффициент при F у наиболее разгруженной колесной пары
Полученный после подстановки значений коэф сцепного веса дает возможность оценить тяговые св-ва локомотива.Рассматривая все вар-ты двухосного эл.воза и решая задачу использования его сцепного веса общим способом и используя метод внешних сил, получаемодинаковые рез-ты. Метод внешн.сил экономит время и уменьшает вер-ть ошибки
В двухосном электровозе изменение давления колесных пар не зависит от расположения тяговых двигателей относительно колесных пар. На эл-зе у которого система рессорного подвешиванияи расположение тяговых двигателей относительно колесных пар будут алогичны двухосному,разгрузка движущих колесных пар не зависит от типа тягового привода и может быть определена методом внешних сил.