10 Главные парциальные частоты
Частоты Ω1 и Ω2 свободных колебаний являются главными частотами и определяют соответственно критические скорости. В каждом из главных колебаний проявляет себя только одна из главных частот: Ω1 или Ω2.
Ω1 – низкая частота
Ω2 – высокая частота
В состав главных частот входят парциальные (частные) частоты отдельных элементов(M, m, mнп)
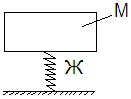
k1, k2, k3, - парциальные (частные) частоты
![]() –соответствует
свободным колебаниям системы
–соответствует
свободным колебаниям системы
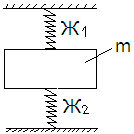
![]() –соответствует
колебаниям массы m относительно массы
кузова M неподрессоренных частей
–соответствует
колебаниям массы m относительно массы
кузова M неподрессоренных частей
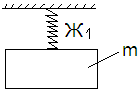
![]() –характеризует
колебания подрессоренной массы тележки
только относительно массы кузова M
–характеризует
колебания подрессоренной массы тележки
только относительно массы кузова M
Главные колебания и их формы
Колебания системы любой из главных частот Ω1 и Ω2 являются резонансными, они определяют соответствующие критические скорости, и являются главными колебаниями.
Величина амплитуд колебаний:
![]()
Зависят от параметров системы и от характера и величины возбуждающей силы Р(t)
Соотношение амплитуд
Соотношение вертикальных перемещений или их амплитуд в котором из главных колебаний определяют формы главных колебаний и называется коэффициентом распределения амплитуд.
В
реальных системах
![]() ,
,
![]()
В
1ом главном колебании:
![]()
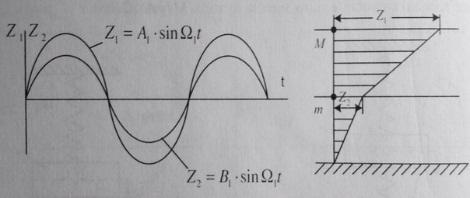
В первом главном колебании обе массы (M и m) перемещаются синхронно с частотой Ω1. Амплитуда колебаний кузова превосходит амплитуду колебаний массы подрессоренных частей.
Во
втором главном колебании:
![]() ,
,
![]()
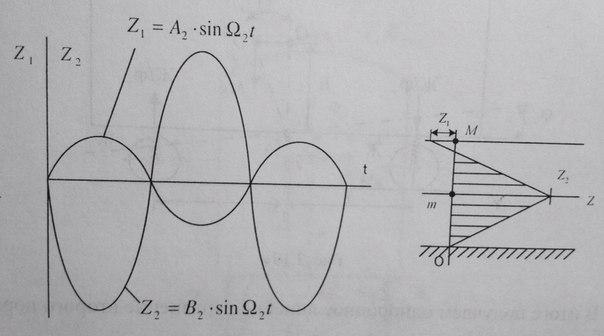
В рассматриваемом случае имеет мест синхронный характер колебаний, амплитуды колебаний подрессоренной массы М значительно превышает амплитуду колебаний массы кузова m. Необходимо отметить, что имеется точка, где колебания массы кузова отсутствуют.
11 Свободные колебания галопирования.
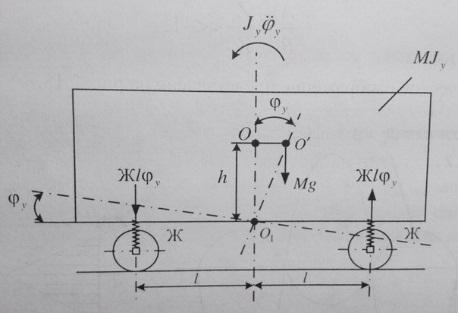
Уравнения свободных колебаний:
![]()

![]() -момент
инерции надрессор. строения относительно
горизонтальной поперечной оси y,
k2г
- квадрат круговой частоты свободных
колебаний галопирования.
-момент
инерции надрессор. строения относительно
горизонтальной поперечной оси y,
k2г
- квадрат круговой частоты свободных
колебаний галопирования.
![]()
![]()
2l
-жёсткая
база экипажа. Ж-
жёсткость рессорного подвешивания,
отнесённая к одной колесной паре.
h-высота
центра тяжести надрессор. строения над
верхней плоскость рессорного подвешивания.
![]() -угол
поворота надрессор. строения вокруг
оси y.
-угол
поворота надрессор. строения вокруг
оси y.
Свободные колебания боковой качки.
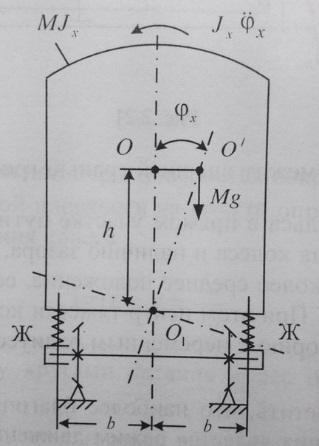
![]() -момент
инерции надрессор. строения относительно
оси X.
2b
-расстояние
между осями рессорных комплектов
колесной пары.
-момент
инерции надрессор. строения относительно
оси X.
2b
-расстояние
между осями рессорных комплектов
колесной пары. ![]() -угол
поворота надрессор. строения вокруг
оси x.
k2бк
- квадрат круговой частоты свободных
колебаний боковой качки.
-угол
поворота надрессор. строения вокруг
оси x.
k2бк
- квадрат круговой частоты свободных
колебаний боковой качки.
Уравнение свободных колебаний:
![]()
![]()
Решение:
![]()
12 Свободные колебания виляния
Общая схема движения отдельной КП в горизонтальной плоскости вдоль оси пути
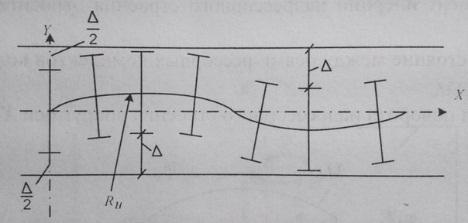
Где
![]() - зазор между внешней гранью гребня
бандажа и внутренней гранью рельса в
прямом участке пути, Ru
– радиус кривизны извилистого движения.
- зазор между внешней гранью гребня
бандажа и внутренней гранью рельса в
прямом участке пути, Ru
– радиус кривизны извилистого движения.
Благодаря конусности круга катания колеса и наличию зазора, колесная пара стремится занять в рельсовой колие среднее положение, совершая перемещение в поперечной плоскости. При этом центр тяжести КП описывает криволинейную траекторию с переменным радиусом кривизны извилистого движения.
Наиболее благоприятные для возникновения колебаний виляний является режим экипажа на выбеге в прямом и горизонтальном участке пути.
Схема расположения КП в рельсовой колее на прямом участке пути:
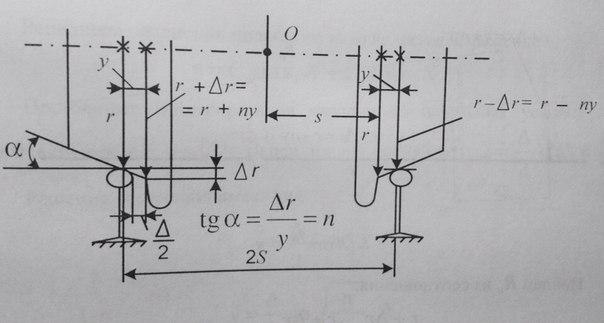
2S – расстояние между кругами катания колес, r – радиус кругов катания.
Ru=S*r/(n*y)
Период извилистого движения КП: