

Эконометрика. Тихомиров
.pdfНесложно заметить, что при наличии ошибок измерения у зависимой и независимых переменных эконометрическая модель может быть представлена в следующем виде:
~ |
~ |
(10.12) |
y |
X ( u–V ), |
где – вектор ошибки истинной модели; u – вектор ошибки измерений зависимой переменной, V – матрица ошибок измерений независимых переменных.
Даже при вполне естественных предположениях о взаимной независимости ошибок , u и V, истинных значений переменных хi и этих ошибок, используя примененные в двух других случаях подходы, можно показать, что:
а) дисперсия такой модели увеличивается по сравнению с моделью,
исходные данные которой измерены без ошибок;
б) использование обычного МНК дает смещенные оценки ее параметров.
В частности, заметим, что дисперсия модели (10.12) при этих предположениях определяется следующим выражением:
2=M[( u–V ) ( u–V )]=M[( )+(u u)+( V V )= |
|
= 2+ u2+ v2, |
(10.13) |
а величины смещения при конечном Т и при Т определены выражениями
(10.9) и (10.10) соответственно.
Как следует из полученных выше результатов, наибольшие трудности при построении эконометрических моделей с ошибками в исходной информации на основе обычного МНК возникают в случае наличия ошибок измерений у независимых переменных. Они связаны с необходимостью устранения смещения в получаемых оценках. Основным методом, который получил достаточно убедительное теоретическое обоснование и широкое



аппроксимирующих функций |
~ |
i = (wi, t), |
~ |
i = (t), где wi |
– набор новых |
x |
x |
||||
|
|
переменных, определяющих тенденции развития фактора хi, а t – фактор времени.
В отсутствии таких “сглаженных переменных”, удовлетворительные
результаты можно получить, используя в качестве инструментальных
значений переменных zi ранги соответствующих переменных |
~ |
i , т. е. числа |
|
x |
|||
|
|
типа 1,2,3,..., характеризующие порядковые номера уровней этих переменных в их ранжированном ряду. Иными словами, 1 присваивается значению zi ,
если переменная |
~ |
принимает наименьшее значение в ряду переменных |
~ |
|||
x i |
x it |
|||||
при t=1,2,....,Т; значение zik=2, если значение |
~ |
|
является наименьшим среди |
|||
x |
ik |
|||||
|
||||||
всех оставшихся значений переменных и т. д.
10.2. Модели с фиктивными независимыми переменными
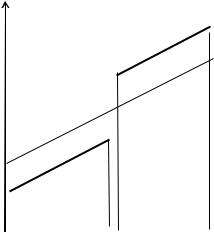
Фиктивные переменные вводятся в эконометрическую модель обычно с целью учета воздействия качественных аспектов на закономерности развития рассматриваемых процессов. К таким аспектам, например, относится различие в условиях развития процессов, предопределивших разницу их уровней в разные периоды времени при сохранении их общих тенденций (см.
рис. 10.1).
На рис. 10.1 показано, что в период (0, T1) для развития процесса была характерна тенденция (1), а в период (T1+1, T2) – тенденция (2) (например, до дефолта и после дефолта, если дефолт не повлиял на характер самой тенденции).
При этом динамические характеристики этих тенденций (темпы роста,
первая производная) совпадают.
у
2

1
t
0 |
T1 T1+1 |
T2 |
Рис. 10.1. Пример различий в условиях развития процесса
Если не принимать во внимание отмеченные различия и попытаться построить единую, обобщенную модель для периода (0, T2), то , очевидно,
что ее уравнение будет соответствовать пунктирной линии, проходящей между сплошными линиями, характеризующими реальные тенденции процесса в рассматриваемых периодах.
Из рис. (10.1), в частности, также вытекает, что, если эконометрическая модель строится только на основе информации первого периода, то ее уравнение будет иметь следующий вид:
уt=01 f( ,x)+ t1, |
(10.26) |
а, если только по информации второго периода, то
уt=02 f( ,x)+ t2, |
(10.26) |
Отличаются эти выражения, если не принимать во внимание возможные различия в их ошибках, только величиной свободного коэффициента, т. е. 0.
Если ввести фиктивную переменную x0i, i=1,2, со следующими свойствами:
1, в первый период;
х01=
0, во второй период;

0, в первый период;
х02=
1, во второй период;
то выражения (10.26) и (10.27) могут быть объединены в рамках одной модели следующего вида:
уt= 01 х01 02х02 f( ,x)+ t. |
(10.26) |
Матрица исходных данных для такой модели будет иметь следующий вид:
|
1 |
0 |
|
|
|
|
|
1 |
0 |
|
|
|
|
|
... ... |
|
|
|
||
X |
1 |
0 |
X it |
, |
(10.29) |
|
0 |
1 |
|||||
|
|
|
|
|||
|
0 |
1 |
|
|
|
|
|
... ... |
|
|
|
||
|
0 |
1 |
|
|
|
|
Xit – матрица значений основных независимых переменных модели, i=1,2,...,
п; t=1,2,....,Т2.
Очевидно, что в этом случае условное математическое ожидание переменной у будет иметь следующий вид:
M[y/ х1 1, х2 0, Xit]= 01 f( ,x) для t=1,2,..., Т1;
и
M[y/ х1 0, х2 1, Xit]= 02 f( ,x) для t= Т1+1,..., Т2;
Заметим, что для рассматриваемого случая может быть предложена и другая модификация модели (10.28), например, с одной фиктивной

переменной (пусть х02), но содержащая свободный член. Ее вид определен следующим уравнением:
уt= 0 02 х02 f( ,x)+ t, |
(10.26) |
и матрица исходных данных для такой модели примет следующий вид:
|
1 |
0 |
|
|
|
|
1 |
0 |
|
|
|
|
... ... |
|
|
|
|
X |
1 |
0 |
X it |
, |
(10.31) |
|
1 |
1 |
|
|
|
|
... ... |
|
|
|
|
|
1 |
1 |
|
|
|
Вместе с тем, несложно увидеть, что введение свободного члена в модели
(10.28) невозможно, поскольку следствием этого является появление единичного столбца в матрице (10.29), что влечет за собой ее необратимость,
поскольку единичный столбец представляет собой линейную комбинацию столбцов значений фиктивных переменных.
Модели типа (10.28) и (10.30) легко могут быть сформированы и на случай большего числа групп фиктивных переменных. Они могут выражать определенные временные периоды (например, с целью учета сезонности),
статус объекта и т. п. В частности, в рассматриваемой в первой главе модели заболеваемости такие переменные могут выражать время года (весна, лето,
осень зима), половозрастную группу населения (взрослые и дети, мужчины и женщины). В этом случае вводятся две группы переменных – временная и половозрастная (всего восемь). Обозначим эти переменные как s1, s2, s3, s4; q1, q2, q3, q4. При этом

1, если наблюдения относятся к i-му времени года, i=1,2,3,4;
si=
0, в остальных случаях;
1, если наблюдения относятся к j-й половозрастной группе j=1,2,3,4;
qj=
0, в остальных случаях;
Тогда эконометрическая модель типа (10.28), описывающая заболеваемость в регионе в зависимости от условий жизнедеятельности,
времени года и половозрастной группы индивидуума, может быть представлена в следующем виде:
y |
t |
|
01 |
|
s1 |
|
02 |
|
s2 |
|
03 |
|
s3 |
|
04 |
|
s4 |
|
|
02 |
q |
|
03 |
q |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
n |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
04 |
|
i |
x it |
t |
, |
(10.32) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
где хit – факторы жизнедеятельности.
Оставление свободного члена в модели заболеваемости, как и в модели
(10.30), приведет к уменьшению числа ее фиктивных переменных. В этом случае выражение (10.32) преобразуется к виду:
y |
t |
|
0 |
|
02 |
|
s2 |
|
03 |
|
s3 |
|
04 |
|
s4 |
|
01 |
q |
|
|
02 |
q |
|
03 |
q |
|
|
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
3 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
n |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
04 |
|
i |
x it |
t |
, |
(10.33) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
i 1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При этом для первого временного сезона и первой половозрастной группы получим 0= 01+ 01.
Заметим, что модели типа (10.32) и (10.33) корректны, если все группы населения одинаково реагируют на изменение условий жизнедеятельности и,
кроме того, заболеваемость характеризуется параллельными сдвигами со сменой времени года.