

Rudenko_O.G.Teormeh_1
.pdf
|
|
Технічна механіка |
M = ∑n |
Mk . |
(3.9) |
k =1 |
|
|
3.5. Умова рівноваги системи пар сил
Виведемо тепер умову рівноваги системи пар сил, розташованих в одній площині.
Система пар сил, розміщених в одній площині, як було доведено вище, може бути замінена еквівалентною парою, момент якої дорівнює алгебраїчній сумі моментів заданих пар сил (3.10).
Для того, щоб система пар сил, розміщених в одній площині, зрівноважувалася, необхідно і достатньо щоб алгебраїчна сума моментів усіх даних пар дорівнювала нулю.
M = ∑n |
Mk = 0. |
(3.10) |
k =1 |
|
|
Якщо система пар сил розміщена в просторі, то вираз 3.8 необхідно прирівняти до нуля.
Для того, щоб система пар сил, розміщених у різних площинах врівноважувалась, необхідно і достатньо, щоб геометрична сума моментів всіх пар сил дорівнювала нулю.
r |
n r |
(3.11) |
M = ∑Mk = 0. |
||
k=1
4.Довільна плоска і просторова система сил, що діють на тверде тіло
4.1. Зведення довільної системи сил до даного центра. Головний вектор і головний момент
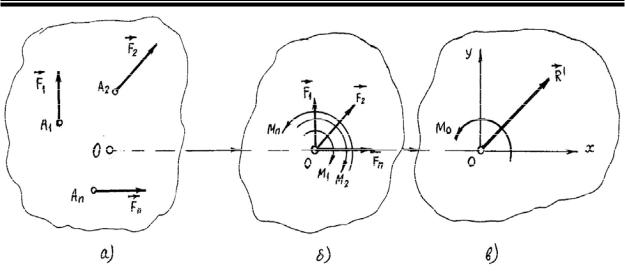
Розглянемо спочатку плоску довільно розміщену систему сил. Як завжди, ми повинні розв’язати дві основні задачі статики: 1) спростити цю систему сил (якщо це можливо) і 2) знайти умови рівноваги цієї системи сил.
31
Частина 1. Теоретична механіка
Рис 4.1
Нехай в одній площині діє п сил, розташованих довільно (рис. 4.1, а).
Візьмемо в площині дії сил довільну точку О, яку назвемо
центром зведення. Використовуючи теорему 3.2, перенесемо сили |
|||
uur |
uur |
uur |
паралельно самим собі в центр О. Це можна зробити, |
F1 |
, F2 |
...Fn |
|
якщо до цих сил приєднати пари сил з моментами M1, M2 ...Mn (рис.
4.1, б). Як видно з рисунка 3.7, б), ми одержали приведену систему |
||||
збіжних сил |
uur |
uur |
uur |
і зведену плоску систему пар сил. Зведену |
F1 |
, F2 |
...Fn |
||
|
|
|
|
ur |
систему збіжних сил можна замінити однією силою R/ (дивись п. 2.1), а зведену плоску систему пар сил можна замінити однією парою сил з моментом Mо (дивись п. 3.4).
|
|
uur |
n |
uur |
|
|
Тоді |
|
R/ =∑Fk , |
|
(4.1) |
||
|
|
Mо = ∑n |
k=1 |
= ∑n |
Mо(uFurk ). |
|
|
|
M k |
(4.2) |
|||
|
uur |
k =1 |
|
k =1 |
|
|
|
|
|
|
|
|
|
Величина R/ , що дорівнює геометричній сумі всіх сил системи
(4.1), називається головним вектором цієї системи.
Величина Mо, що дорівнює алгебраїчній сумі моментів всіх сил відносно центра зведення (4.2), називається головним моментом системи відносно центра зведення О.
Ми довели теорему Пуансо. (Луї Пуансо (1777-1859) - французький
механік, математик, член паризької АН).
Теорема 4.1. (Теорема Пуансон). Довільну плоску систему сил, що діє на тверде тіло, в загальному випадку можна замінити однією
32
Технічна механіка
ur
силою, рівною головному вектору R/ системи, прикладеною в довільно вибраному центрі зведення О, і однією парою сил з моментом, рівним головному моменту Mо системи відносно центра зведення О (рис. 4.1,в).
Примітка : між поняттям рівнодійної і головного вектора є така різниця.
Рівнодійна – це одна сила, що замінює дію всієї системи сил. Головний вектор – це сила, що замінює дію зведеної системи
збіжних сил, і крім нього, діє ще пара сил (головний момент).
Розглянемо тепер довільну просторову систему сил. Спочатку доведемо наступну лему.
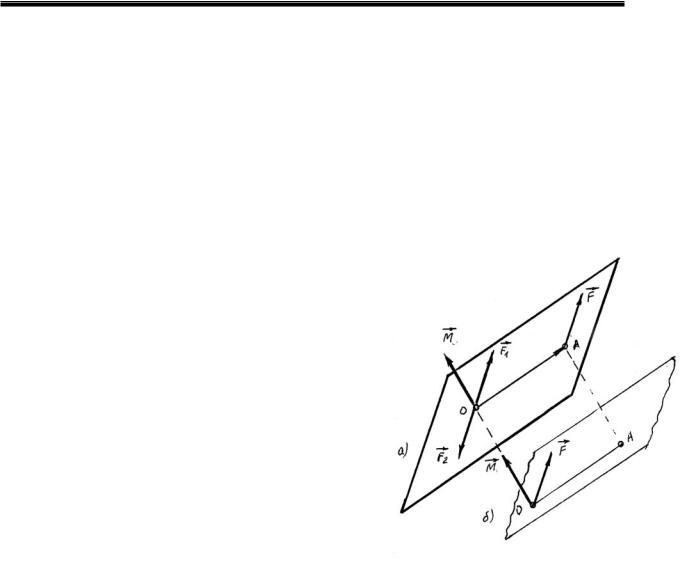
Лема. Силу можна переносити паралельно самій собі в довільну точку твердого тіла, якщо при цьому приєднати пару сил, векторний момент якої дорівнює векторному моменту сили, що переноситься, відносно нової точки прикладання сили.
Доведення. |
Нехай у просторі в точці |
|
ur |
. Потрібно силу |
r |
А діє силаF |
F |
|
перенести паралельно самій собі в точку О (рис. 4.2, а). Прикладемо |
|||
|
r |
r |
ur |
в точці О зрівноважені сили F1 |
і F 2 |
паралельно силі F , причому |
|
F1 |
= F2 = F . Це можливо зробити згідно з аксіомами статики. Сили |
||
ur |
ur |
|
uur |
F |
і F 2 утворилиur пару сил, вектор-момент якої M . Крім цього в |
||
точці О діє сила F1 . Утворену пару сил назвемо приєднаною парою |
|||
|
ur |
uuur |
ur |
сил. Вектор-момент цієї пари M |
=OA×F . Цей вектор напрямлений |
||
перпендикулярно площині, в якій діє пара сил. Таким чином, якщо переносити силу паралельно самій собі в іншу точку, то необхідно приєднати до неї пару сил. Лему доведено. У подальшому саму
пару сил показувати не будемо, а показуватимемо її вектор-момент uur
M (рис. 4.2, б)
Теорема (теорема Пуансо). Довільну просторову систему сил, що діє на абсолютне тверде тіло, можна привести до сили, рівній головному вектору системи сил, і до пари сил, векторний момент якої дорівнює головному моменту системи сил відносно точки, вибраної за центр зведення.
33

Частина 1. Теоретична механіка
Доведення. Нехай у просторі діє n сил:
центр зведення довільну точку О (рис. 4.3, а). uur uuur uur
Перенесемо сили F1, F2 ...Fn паралельно самим собі в точку О.
Згідно з лемою, в точці О до цих сил необхідно приєднати пари сил |
|||||||||||
з векторами-моментами |
uuur uuuur |
uuur |
(рис. 4.3, б) |
|
|
|
|
||||
M1, |
M2 ,...Mn |
uur |
|
|
|
||||||
uuur |
uuur uur |
uur |
uur |
uuur |
uuur |
uur |
uur |
|
|
|
|
M1 = Mo (F1 ) = (r 1 |
×F1 ), M2 |
= Mo (F2 ) = (r 2 |
×F2 ), |
|
(4.3) |
||||||
uuur |
uuur uur |
uur |
uur |
|
|
|
|
|
|
||
M K |
= Mo (FK ) = (r K ×FK ) |
|
|
|
|
uur uur |
uur |
||||
У точці О одержали просторову збіжну систему сил F |
, F |
...F і |
|||||||||
просторову систему пар сил з моментами |
uur |
uuur |
uuur |
1 |
2 |
n |
|||||
M1, |
M2 ,...Murn |
. Дію збіжної |
|||||||||
приведеної системи сил можна замінити дією сили R' |
(рис. 4.3, в). |
||||||||||
|
uur |
uur |
uuuur uuuur |
n uur |
|
|
|
|
|
||
|
R' |
= F1 |
+ F2 +...+Fn = ∑Fk . |
|
|
|
(4.4) |
||||
uur |
k=1 |
|
Вектор R' , рівний геометричній сумі всіх сил довільної просторової системи сил, називається головним вектором цієї системи.
Дію приведених n пар сил, що розташовані в просторі, можна замінити дією однієї пари сил з моментом Muuro (рис. 4.3, в).
Рис. 4.3
uuur |
uuur |
uuur |
uuur |
n uuur |
|
Mo |
= M1 |
+ M2 |
+... + Mn |
= ∑Mk . |
(4.5) |
k =1
Використовуючи вираз (4.3), запишемо вираз (4.5) в іншому вигляді:
34

Технічна механіка
uuur |
uuur uur uuur uur |
uuur uur |
n |
uuur uur |
n |
ur |
uur |
Mo |
= Mo (F1 ) + Mo (F2 ) +... + Mn (Fn ) = ∑Mo (Fk ) = ∑(rk |
×Fk ) . (4.6) |
|||||
|
|
|
k=1 |
|
k=1 |
|
|
Вектор Muuro , рівний геометричній сумі векторів-моментів усіх
сил довільної просторової системи сил відносно центра зведення О, називається головним моментом цієї системи сил відносно того ж центра зведення.
Таким чином, у результаті зведення довільної системи сил до даного центра одержали силу, рівну головному вектору цієї системи сил, і пару сил з моментом, рівним головному моменту системи сил відносно центра зведення.
Теорема доведена.
4.2. Аналітичний спосіб знаходження головного вектора і головного момента просторової системи сил
Виберемо початок координат у точці Оur, точці зведення (рис.
4.3, в). Знайдемо спочатку головний вектор R' . Спроектуємо вираз (4.4) на координатні осі:
Rx' = ∑n |
Fkx , Ry' = ∑n |
Fky , Rz' = ∑n |
Fkz . |
(4.7) |
k =1 |
k=1 |
k =1 |
|
|
Модуль головного вектора
n |
n |
n |
|
R' = (∑Fkx )2 |
+(∑Fky )2 |
+(∑Fkz ) . |
(4.8) |
k=1 |
k =1 |
k=1 |
|
Напрям головного вектора знайдемо за напрямними косинусами:
uur′ r |
R'x |
uur′ r |
R' y |
uur′ r |
R'z |
|
|
cos(R ,i) = |
|
, cos(R , j) = |
|
, cos(R ,k) = |
|
. |
(4.9) |
R' |
R' |
R' |
|||||
Щоб аналітичним шляхом знайти головний вектор, необхідно:
1)за формулами (4.7) знайти проекції головного вектора на осі координат;
2)за формулою (4.8) знайти модуль головного вектора;
3)за формулами (4.9) знайти напрям дії головного вектора.
Знайдемо головний момент Muuro системи сил. Спроектуємо
вираз (4.6) на координатні осі:
n |
uur |
n |
uur |
n |
uur |
|
Mox = ∑M x (Fk ), |
Moy = ∑M y (Fk ), |
Moz = ∑M z (Fk ), |
(4.10) |
|||
k=1 |
|
k=1 |
|
k=1 |
|
|
Модуль головного момента
35
Частина 1. Теоретична механіка
n |
uur |
n |
uur |
n |
uur |
Mo = (∑M x (Fk ))2 |
+(∑M y (Fk ))2 |
+(∑M z (Fk ))2 . (4.11) |
|||
k=1 |
|
k=1 |
|
k=1 |
|
Напрям головного момента знайдемо за напрямними косинусами
uuur r |
M |
o x |
|
uuur r |
Mo y |
uuur r |
M |
o z |
. (4.12) |
cos(Mo ,i) = |
|
, |
cos(Mo , j) = |
|
, cos(Mo , k) = |
|
|||
|
|
Mo |
|
|
|||||
|
Mo |
|
|
Mo |
|||||
|
|
|
|
|
|
|
uur |
||
Щоб аналітичним шляхом знайти головний момент Mo |
, необхідно: |
||||||||
1)за формулами (4.10) знайти проекції головного момента на осі координат;
2)за формулою (4.11) знайти модуль головного момента,
3)за формулами (4.12) знайти напрям дії головного момента.
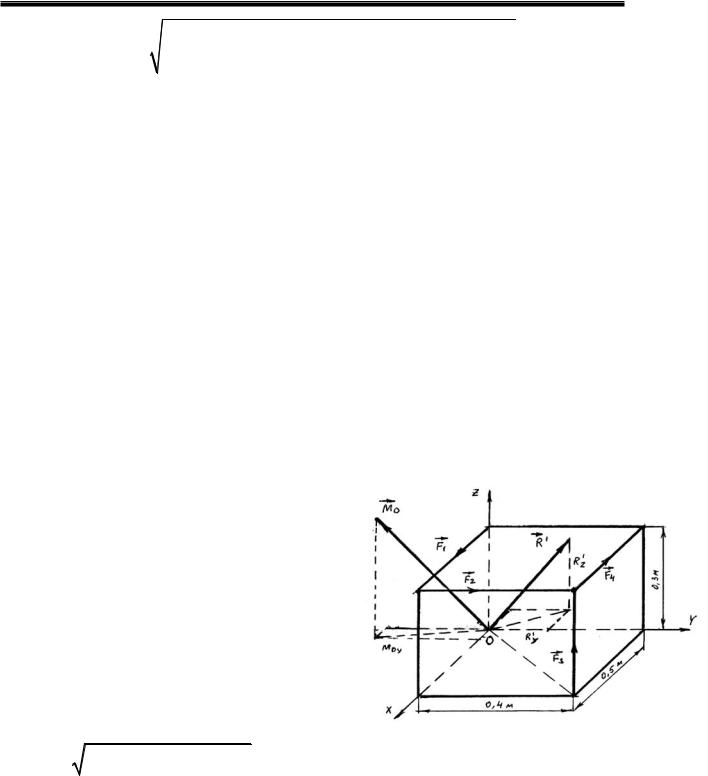
Приклад. На сторонах паралелепіпеда діють чотири сили
F1 = 2 kH , F2 =3 kH , F3 = 4 kH , F4 =5 kH .
Розміри паралелепіпеда показано на рисунку 4.4. Привести цю систему сил до простішого вигляду, тобто знайти головний вектор і головний момент.
Розв’язування. Виберемо за центр зведення точку О, яка одночасно буде і початком системи
координат. uur Знайдемо головний вектор R' .
1)За формулою (4.7) знайдемо проекції головного вектора на координатні осі:
Rx′ = F1 − F4 = 2 −5 = −3 (kH ),
R′y = F2 =3 (kH ), Rz′ = F3 = 4 (kH ).
2)За формулою (4.6) знайдемо модуль головного вектора:
R′ = (Rx' )2 +(Ry' )2 +(Rz' )2 =5,83 (kH ) |
Рис. 4.4 |
.
3) За формулами (4.7) знайдемо напрям дії головного вектора:
uur r |
R' |
uur r |
R' y |
uur r |
R' |
||
cos(R′,i) = |
x |
= −0,51, |
cos(R′, j) = |
|
= 0,51, cos(R′,k) = |
z |
= 0,69 . |
|
R' |
|
|||||
|
R' |
|
|
R' |
|||
|
|
|
|
ur |
|
|
|
4) Побудуємо головний вектор R' . У даному разі його краще побудувати по проекціях на координатні осі (рис. 4.4).
Знайдемо головний момент Muuro
36
Технічна механіка
а). За формулами (4.10) знайдемо проекції головного момента на координатні осі.
Mox = −F2 0,3 + F3 0, 4 = −3 0,3 +4 0, 4 = 0,7 (kHм),
Moy = F1 0,3 − F3 0,5 − F4 0,3 = 2 0,3 −4 0,5 −5 0,3 = −2,9 (kHм),
Moz = F2 0,5 + F4 0, 4 =3 0,5 +5 0,4 =3,5 (kHм) /
б). За формулою (4.11) знайдемо модуль головного момента
Mo = Mo2x + Mo2y + Mo2z = 0,72 +(−2,9)2 +3,52 = 4,6 (kHм) .
в). За формулами (4.12) знайдемо напрям дії головного момента
uuur r |
M |
o x |
|
uuur r |
Mo y |
cos(Mo ,i) = |
|
= 0,15, |
cos(Mo , j) = |
|
|
|
|
Mo |
|||
|
Mo |
|
|||
4). Побудуємо вектор Muuro по його
проекціях на координатні осі
(рис. 4.4).
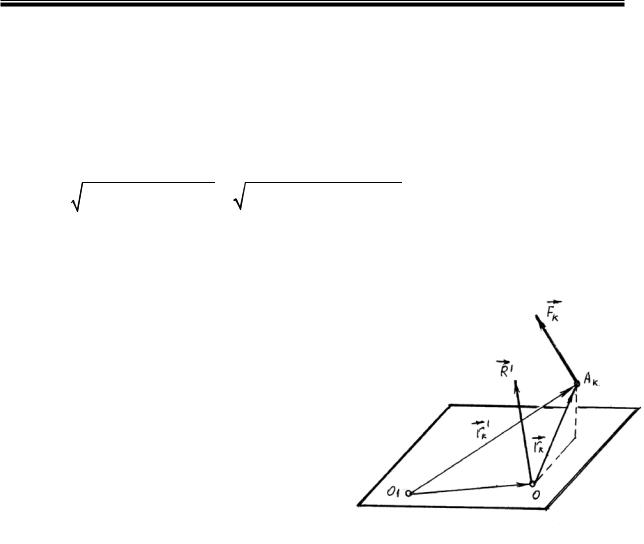
З’ясуємо залежність головного вектора і головного момента просторової системи сил від вибору центра зведення.
Нехай в просторі діє довільна просторова система сил. На рис. 4.5
показана силаFurK - одна із цих сил. У
uuur |
r |
M |
|
|
|
= −0,63, cos(Mo |
, k) = |
|
o z |
= 0,76 |
|
Mo |
|||||
|
|
|
|||
пункті 4.1. за центр зведення взяли довільну точку О. При цьомуur
система сил була зведена до однієї сили (головний вектор R' ) і |
|||||||
однієї пари сил (головний момент Muuro ): |
|
|
|
||||
uur |
n uur |
uuur |
n |
uur |
|
|
|
R' = ∑Fk , |
Mo |
= ∑(rk ×Fk ), |
|
(4.13) |
|||
|
k=1 |
|
k=1 |
|
uur |
|
|
де rr - радіус-вектор точки A |
прикладання сили |
, проведений із |
|||||
F |
|||||||
k |
k |
|
|
|
K |
|
|
центра О. |
|
|
|
|
|
|
|
Візьмемо за центр |
зведення |
нову |
точку |
O1 . |
Вияснимо, як |
||
зміниться при цьому головний вектор і головний момент. Головний
uur
вектор R' змінитися не може, тому що він утворюється із векторів uur uur uur
сил F1, F2 ...Fk ,, які переносяться паралельно самим собі. А
паралельне переміщення сили не залежить від положення точкиur О.
Таким чином, при зміні точки зведення головний вектор R' не змінюється.
37
Частина 1. Теоретична механіка
Розглянемо зміну головного момента при переміні точки зведення. |
||||||||||||||||||||
Нехай |
uur |
- |
радіус-вектор |
точки |
|
ur |
прикладання |
сили |
uur |
|||||||||||
r' |
|
A |
F , |
|||||||||||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
k |
проведений із нового центра O1 . Тоді |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
uuur |
n uur |
|
uur |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Mo1 = ∑(rk′ |
|
×Fk ) . |
|
|
|
(4.14) |
|||||
|
|
|
|
|
|
uur |
|
uuur |
|
ur k =1 |
|
|
|
|
|
|
|
|
||
З рис. 4.5 видно, що rk′' |
= 010 |
+rk |
|
|
|
|
|
|
|
|
|
|||||||||
Підставимо rk′' |
у вираз(4.14) і використаємо вираз (4.13) |
|
|
|
||||||||||||||||
uuur |
n |
uuur |
ur uur |
|
|
n |
uuur |
uur |
|
n |
uur |
uur |
uur |
n |
uur |
uuur |
||||
Mo1 |
= ∑[(0|0 |
+rk )×Fk |
] = ∑(0|0 |
×Fk ) |
+∑(rk |
×Fk ) = (0|0× |
∑Fk ) +Mo . |
|||||||||||||
|
k =1 |
|
|
|
uuur |
|
uuurk=1 |
uur |
ur |
|
k=1 |
|
|
|
k=1 |
(4.15) |
||||
|
|
|
|
|
M |
o |
= M |
o |
+ |
(0 0 |
×R' ) , |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
||
|
|
|
uuur |
|
1 |
|
uuur |
uur |
|
|
|
|
|
|
|
|
|
|||
або інакше |
uuur |
|
|
|
|
|
|
|
(4.16) |
|||||||||||
Mo |
= Mo + Mo (R' ). |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
При зміні центра зведення головний момент змінюється на величину, що дорівнює моменту головного вектора відносно нового центра зведення.
Теорема 4.3. (Теорема Варіньона). Якщо довільна просторова система сил зводиться до рівнодійної, то момент цієї рівнодійної відносно довільного центра дорівнює геометричній сумі моментів усіх сил системи відносно того ж центра.
uuur ur |
n uuur uur |
|
Mo (R) = ∑Mo (Fk ) . |
(4.17) |
|
k=1
Спочатку доведемо, що в деяких випадках система сил зводиться до рівнодійної. У загальному випадку довільна система
|
ur′ |
|
uuur |
сил зводиться до головного вектора |
R |
і головного момента |
Mo . |
Тільки у двох випадках система сил може звестися до рівнодійної. Розглянемо ці випадки.
1. Якщо при зведені сил до довільного центра О головний uuur
момент сил urMo = 0 , то ця система сил зводиться до
рівнодійної R , точка прикладання якої збігається з центром зведення О.
2. Можливий такий варіант. При зведенні системи сил до uuur
довільного цента О виявилося, що головний момент Mo
перпендикулярний до головного вектора uRr′ (рис. 4.6, а).
38

Технічна механіка
Рис. 4.6
У цьому разі головний момент розглянемо у вигляді пари сил
r r |
r |
|
= |
r |
ur |
|
|
|
|
( R , R ), де R |
|
R = |
R′ (рис. 4.6, б). |
|
|
|
|
||
1 |
1 |
|
ur |
|
|
|
|
|
|
Сили |
ur′ |
|
і |
зрівноважені і їх |
згідно |
з |
аксіомою 2 |
можна |
|
R |
|
R1 |
|||||||
відкинути. |
Залишилась одна сила |
r |
є |
рівнодійною |
даної |
||||
R , яка |
|||||||||
системи сил, але точка її прикладання А не збігається є з центром зведення О (рис. 4.6, в).
Відстань ОА визначається за формулою
OA = MRO′ .
Тепер доведемоurтеорему Варіньона. Система сил звелася в точці
А до рівнодійної R (рис. 4.6, в). Знайдемо момент сил відносно довільного центра О, використовуючи формулу (4.16) в позначеннях, поданих на рис 4.6, в.
Доведення. Нехай зводиться прикладеній в точці А тіла (рис.
4.6). |
uur |
uuur ur |
uuur ur |
|
Mo = M A (R) + Mo (R) . |
||
Але головний момент M A |
усіх сил відносноr точки А дорівнює |
||
нулю, бо через цю точку проходить рівнодійна R сил. Маємо |
|||
|
uuur ur |
uuur |
n uuur uur |
Mo (R) = Mo = ∑Mo (Fk ).
k =1
Теорему доведено.
4.3. Умови рівноваги довільної просторової системи сил
Розглянемо випадок, коли головний вектор |
||
uuur |
одночасно дорівнюють нулю. |
|
момент Mo |
||
|
ur |
uuuuur |
|
R' = 0, |
Mo = 0 . |
uur
R' і головний
(4.18)
39

Частина 1. Теоретична механіка
Умови (4.18) є умовами рівноваги тіла під дією просторової системи сил у векторній формі.
Аналітичні умови рівноваги можна одержати із умов рівноваги (4.18) з використанням формул (4.8) і (4.11)
∑n Fkx = 0, k =1
∑n Fky = 0, k =1
∑n Fkz = 0, k =1
∑n |
M x (uFurk ) = 0, |
|
k=1 |
|
|
n |
uur |
|
∑M y (Fk ) = 0, |
(4.19) |
|
k=1 |
|
|
n |
uur |
|
∑M z (Fk ) = 0. |
|
|
k=1
Для рівноваги довільної просторової системи сил, прикладених до твердого тіла, необхідно і достатньо, щоб три алгебраїчних суми проекцій усіх сил на декартові осі координат були рівними нулю і алгебраїчні суми моментів усіх сил відносно трьох координаних осей також були рівними нулю.
Нехай усі сили, що діють на тверде тіло паралельні між собою. У такому разі доцільно одну із координатних осей (наприклад, вісь OZ ) спрямувати паралельно цим силам. Тоді із умов рівноваги (4.19) залишаться тільки три рівняння, а три перетворяться в тотожності. Дійсно, проекції сил на осі OX і OY дорівнюють нулю. Тому що сили паралельні осі OZ , моменти їх відносно цієї осі дорівнюють нулю. Тоді із шести рівнянь (4.19) залишаться лише три
n |
n |
uur |
)= 0, |
∑Fkz = 0, |
∑M x (Fk |
||
k=1 |
k=1 |
|
|
n |
uur |
)= 0. |
|
∑M y (Fk |
(4.20) |
||
k=1
4.4. Умови рівноваги плоскої довільної системи сил
При зведенні плоскої системи сил до даного центра може
виявитися, що |
uur |
|
|
R/ = 0 ; M0 = 0 |
(4.21) |
Умови (4.21) є необхідними і достатніми умовами рівноваги довільної плоскої системи сил.
Для рівноваги довільної плоскої системи сил необхідно і достатньо щоб одночасно і головний вектор і головний момент цієї системи сил відносно довільно вибраного центра зведення дорівнювали нулю.
40