

Rudenko_O.G.Teormeh_1
.pdfТехнічна механіка
рівноваги балки АС.
∑n |
FkX |
= 0 ; |
X A = 0; |
(4) |
ki=1 |
|
|
|
|
∑n |
FkY |
= 0; |
(5) |
|
k =1 |
|
uur |
|
|
n |
|
= 0 ; M A − R / B 2 −Q 1 3 = 0 (6) |
||
∑M A (Fk ) |
||||
k=1
RB =RB/
Розв’язуючи рівняння (1)-(6), одержимо:
ХА=ХD=0, YA=8 кН, МA=22 кНм, YD=2 кН, RB/ =2 кН.
Перевіримо результати. Складемо одне з рівнянь рівноваги конструкції в цілому (рис 4.12, а).
n uur
∑MB(Fk ) =MA −YA 2−Q1 1−Q22+YD 4=22−8 2−6 1−4 2+2 4=0
k=1
Розглянемо тепер приклади розв’язання задач на довільну просторову систему сил.
Задача 4.7.
F1=F2=4 кН
F3=F4=3r кН
Rr1 =? Mo =?
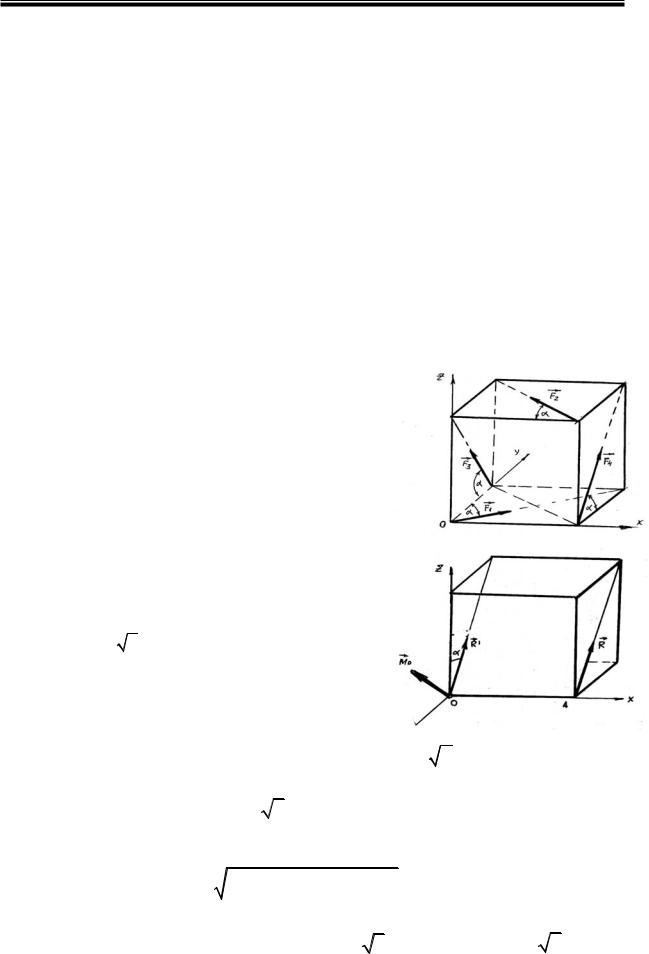
До чого зводяться сили, що напрямлені вздовж ребер паралелепіпеда, якщо ОА=0,5 м, ОВ=0,4 м,
ОС=0,3 м (рис. 4.13)?
За центр зведення візьмемо точку О. В цій точці виберемо початок координат.
Знайдемо величинуr і напрям головного вектора R1 . Для цього використаємо формули (4.7)-(4.9):
Rx1 = ∑4 |
Fkx = F3 − F4 |
= 0, |
|
k=1 |
|
|
|
R1y = ∑4 |
Fky = F1 − F2 |
= 0 , |
Рис. 4.13 |
k=1 |
|
|
|
Rz1 = ∑4 |
Fkz = 0 . |
|
|
k =1 |
|
|
|
51
Частина 1. Теоретична механіка
Звідси видно, що головний вектор R1 =0. |
r |
Для |
|||
Знайдемо величину і напрям головного момента |
Mo . |
||||
цього скористаємось формулами (4.10)-(4.12): |
|
|
|||
|
Mox = ∑4 |
M x (Frk ) = −F1 0.3 + F2 0.3 = 0 , |
|
|
|
|
k=1 |
|
M y (Frk ) = 0. |
|
|
|
|
Moy = ∑4 |
|
|
|
|
|
k =1 |
|
|
|
Moz = ∑4 |
M z (Frk ) = −F2 0.5 + F4 0.4 = −4 0.5 +3 0.4 = −0.8 (кНм). |
|
|||
k =1 |
|
|
|
|
|
Головний момент |
системи Mo чисельно дорівнює |
Moz . |
|||
Mo =0,8 кНм. Система сил зводиться до однієї пари сил, що діє в площині ХОY. Вектор-момент Mo напрямлений вздовж осі OZ в протилежний бік додатному напряму осі OZ (рис. 4.13).
Задача 4.8.
Привести до простішого вигляду систему із чотирьох рівних за модулем сил F1=F2=F3=F4=F, що прикладені до чотирьох вершин куба з ребром а, так як показано на рис. 4.14.
Початок системи координат виберемо в точці зведення О. Кут α =450, тому, що в даному разі у нас куб зі
стороною а. |
|
||
sinα =cosα = 2 / 2. |
|
||
Знайдемо головний вектор Rr |
1 : |
||
|
4 |
|
|
Rx1 = ∑ Fkx = F1 sinα −F2 cosα =0 , |
|||
|
k=1 |
|
|
|
4 |
|
|
R1y |
= ∑ Fky = F1 cosα + F2 sinα −F3 cosα + F4 cosα = 2F , |
||
|
k=1 |
|
|
R1z |
= ∑4 |
Fkz = F3 sinα + F4 sinα = |
2F . |
|
k =1 |
|
|
Модуль головного вектора Rr |
1 : |
||
R1 = (R1x )2 +(R1y )2 +(R1z )2 = 2F .
Рис. 4.14
Рис. 4.15
За напрямними косинусами знайдемо напрям головного вектора:
cos(Rr1,ir) = |
Rx1 |
= 0 , |
cos(Rr1, rj ) = |
Ry1 |
= |
2 , cos(Rr1, kr) = |
Rz1 |
= |
2 . |
||
|
1 |
|
|
1 |
|
|
|
1 |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
2 |
|
R |
|
2 |
|
|
52
Технічна механіка
Вектор R1 лежить у площині YOZ і складає кут 450 з віссю OZ. (рис. 4.15). Знайдемо головний момент Mo :
Mox = ∑4 |
M x (Frk ) = −F2 sinα a + F3 sinα a = 0, |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
k=1 |
|
M y (Frk ) = −F4 sinα a − F2 cosα a = − |
|
|
|
|
|
|
|
|
|||||||||||||||||
Moy = ∑4 |
|
2aF , |
|
|
|
|
|
|
||||||||||||||||||||
|
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Moz |
= ∑4 |
M z (Frk ) = F2 sinα a + F4 cosα a = |
2aF . |
|
|
|
|
|
|
|
||||||||||||||||||
|
k=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mo = Mox2 + Moy2 + Moz2 = 2aF , |
|
|
Mo = 2aF . |
|
|
|
|
|
|
|||||||||||||||||||
|
Напрям знайдемо за напрямними косинусами. |
|
|
|
|
|
|
|||||||||||||||||||||
|
r r |
|
Mo |
|
|
|
|
|
|
|
r |
r |
|
|
Moy |
|
|
2 |
|
|
r |
r |
Mo |
z |
|
2 |
|
|
cos(Mo,i ) = |
|
x |
= 0 ; cos(Mo, j) = |
|
|
|
= − |
|
|
; |
cos(Mo, k ) = |
|
= |
|
. |
|||||||||||||
|
|
|
|
Mo |
|
|
r |
|
|
|
|
|
Mo |
|
|
2 |
|
|
|
|
Mo |
2 |
|
|||||
|
Вектор-момент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Mo лежить у площині YOZ і складає кут 1350 з |
|||||||||||||||||||||||||||
віссю OY (рис. 4.15). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Таким чином, система сил зводиться до головного вектора R1 і |
|||||||||||||||||||||||||||
головного момента |
r |
|
. Залишилося визначити, чи зводиться ця |
|||||||||||||||||||||||||
Mo |
||||||||||||||||||||||||||||
система сил до рівнодійної, чи до динамічного гвинта. |
|
|
|
|
|
|||||||||||||||||||||||
Знайдемо скалярний добуток R1 Mo : |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
r1 |
r |
|
1 |
|
|
|
1 |
Mo |
|
+ |
1 |
|
|
= 0 0 + 2F (− 2aF) + 2F 2aF = 0 |
||||||||||||||
R Mo = |
R Mo |
x |
+ R |
y |
R Mo |
z |
||||||||||||||||||||||
|
|
|
x |
|
|
y |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Це означає, що Rr |
1 |
Mo . |
|
|
Цей випадок зведення розглянуто в |
||||||||||||||||||||||
п. 4.6.2. У даному разі система сил зводиться до рівнодійної R з |
||||||||||||||||||||||||||||
точкою прикладання А, що розміщена від точки О на відстані |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
OA = |
|
Mo = 2aF |
= a |
|
(рис. 4.15). |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R1 |
2F |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Задача 4.9.
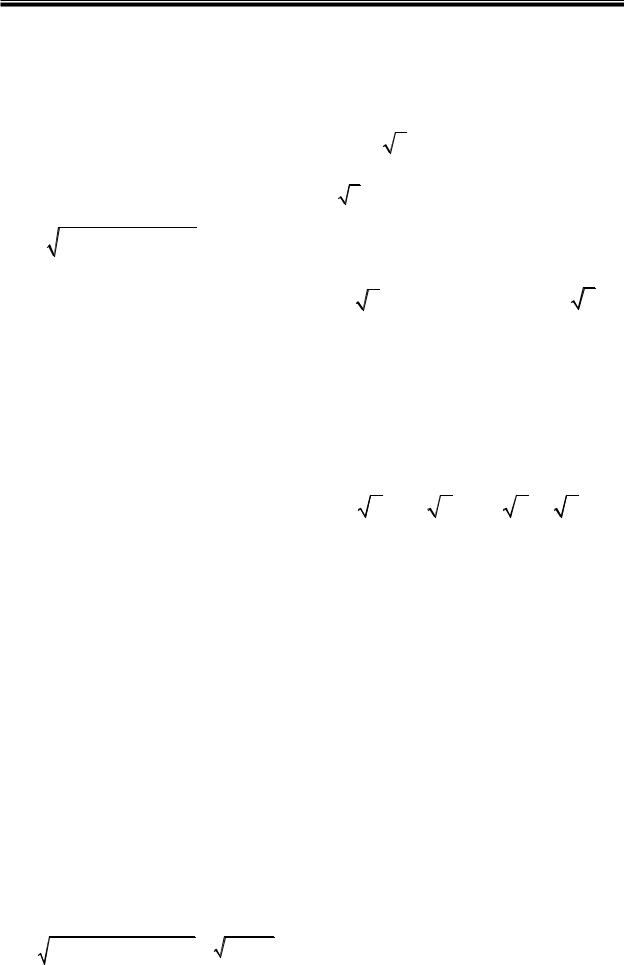
Звести систему сил до простішого вигляду, якщо сили F1=2 кН, F2=4 кН, F3=3 кН, F4=2 кН, прикладені до вершин куба з ребром 2 м (рис. 4.16). За центр зведення виберемо точку О. В цій точці виберемо початок системи координат. Знайдемо величину і напрям головного вектора R1 :
R1x = ∑4 |
Fkx = F1 −F4 = 2 −2 =0 |
|
|
||
k=1 |
|
|
|
|
|
R1y = ∑4 |
Fky = F2 = 4 (кН) |
Rz1 = ∑4 |
Fkz = F3 =3 (кН). |
||
k =1 |
|
|
|
k=1 |
|
Rr1 = (R1 )2 |
+(R1 )2 |
+(R1 )2 = 42 |
+32 = 5 (кН) |
||
|
x |
y |
z |
|
|
53
Частина 1. Теоретична механіка
Напрям Rr1 знайдемо за напрямними косинусами:
r |
) |
|
R1 |
|
|
|
|
|
cos(R,i ) = |
|
x |
= 0 ; |
|
||||
1 |
|
|||||||
|
|
|
R |
|
|
|
|
|
r1 |
) |
|
R1y |
|
|
4 |
; |
|
cos(R |
, j ) = |
|
|
= |
|
|
||
|
1 |
5 |
|
|||||
|
r |
|
R |
|
|
|
|
|
r1 |
|
R1 |
|
|
3 |
|
|
|
cos(R |
, k ) = |
|
z |
|
= |
|
|
|
|
1 |
|
|
|
|
|||
|
r |
|
R |
|
|
5 |
|
|
|
|
|
|
|
Рис. 4.16 |
|||
Вектор R1 |
|
лежить у |
||||||
площині YOZ |
(рис. 4.17). |
|
||||||
|
||||||||
Знайдемо величину і напрям головного момента Mo :
Mox = ∑4 |
M x (Frk ) =0; |
|
k=1 |
M y (Frk ) = 0; |
|
Moy = ∑4 |
Mo = Mox2 + Moy2 + Moz2 |
|
k=1 |
|
|
Рис. 4.17
= 4 (кНм) .
Moz = ∑4 |
M z (Frk ) = F4 2 = 4 |
|
|
(кНм) ; |
|
|
|
|
|
|
|
|
Mo = 4кНм |
|||||||||||||
k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
напрямлений вертикально вгору по осі OZ (рис. |
|||||||||||||||||||||
Вектор Mo |
||||||||||||||||||||||||||
4.17). Система сил звелася до головного вектора R1 і головного |
||||||||||||||||||||||||||
момента Mro . Розглянемо скалярний добуток R1 |
Mo : |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
r |
r |
|
|
|
|
|
+ R1 Mo |
|
+ R1Mo |
|
= 0 +4 0 |
+3 4 ≠ 0 |
|
|
|
|||||||
|
|
|
|
R1 Mo = R1Mo |
x |
y |
z |
|
|
|
||||||||||||||||
|
|
|
|
|
|
x |
|
|
|
y |
|
|
z |
|
|
|
|
|
|
|
|
|
||||
Значить |
вектор Rr |
1 не перпендикулярний Mo . Ця система |
||||||||||||||||||||||||
зводиться до динамічного гвинта. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Щоб |
|
знайти |
положення |
|
центральної |
|
осі, |
|
використаємо |
|||||||||||||||||
|
|
M |
ox |
− ( yR' |
− zR' |
) |
|
|
M o |
y |
− |
(zRx' − xRz' ) |
M |
oz |
− (xR |
' |
− yR' |
) |
|
|||||||
рівняння |
|
|
z |
y |
|
|
|
= |
|
|
|
|
|
|
= |
|
|
y |
x |
|
, яке в |
|||||
|
|
|
Rx' |
|
|
|
|
|
|
|
|
|
Ry' |
|
|
|
|
Rz' |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
нашій задачі прийме вигляд: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
−(3y −4z) = |
3x |
= 4 −4x |
або: |
3y-4z=0; |
|
9x=16-16x |
|
|
|
|
||||||||||||||||
0 |
|
4 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Остаточно маємо: y = 4 z ; |
|
x = |
16 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
||
Якщо в цих рівняннях z=0, то знайдемо координати точки А перетину центральної осі з координатною площиною XOY (рис. 4.17):
54
Технічна механіка
x = |
16 ; y = 0; (z = 0) |
|
||
|
|
25 |
|
|
|
|
Залишилося знайти значення момента М1. |
||
M |
1 |
= 0 +4 0 +3 4 = |
12 = 2,4(кНм) |
М =2,4 кНм |
|
5 |
5 |
1 |
|
|
|
|
||
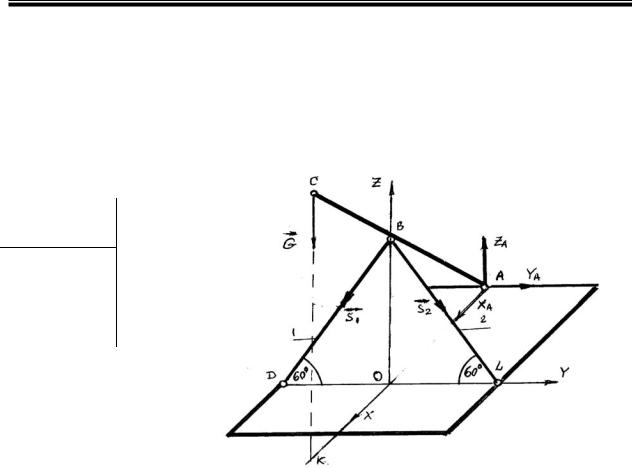
Задача 4.10
G=10 кН АВ=2 ВС
S1=? S2=? ХА=?, YА=?, ZА=?
Три невагомих стержня АС, ВD і BL з’єднані в точці В і з горизонтальною площиною шарнірно. В точці С підвішено вантаж вагою 10 кН. Знайти реакції в стержнях 1 і 2 та реакцію сферичного шарніра А, якщо площина DBL вертикальна (рис. 4.18).
Розглянемо рівновагу стержня АС. Для нього в’язями є стержні 1 і 2 та сферичний шарнір А. Відкинемо в’язі, а їх дію на
стержень АС замінимо дією реакцій в’язей. Реакції S 1 і S 2 стержнів 1, 2 напрямлені по стержнях, бо стержні невагомі і на кінцях мають шарнірні з’єднання. Реакцію сферичного шарніра розкладемо на три складові XA, YA, ZA. Одержали просторову довільну систему сил. Запишемо рівняння рівноваги стержня АС:
n |
= 0; |
ХА=0; |
(1) |
∑ Fk x |
|||
k =1 |
|
|
|
n |
= 0 ; |
-S1 cos 600+ S2 cos 600+YA=0; |
(2) |
∑ Fk y |
|||
k =1 |
|
|
|
n |
= 0 ; |
-S1 sin 600- S2 sin 600+ZA-G=0; |
(3) |
∑ Fk z |
|||
k =1 |
|
|
|
n |
|
S1 cos 600.OB- S2 cos 600.OB =0; |
(4) |
∑M x (Frk ) =0 ; |
|||
k=1
55
Частина 1. Теоретична механіка
n |
; |
ZA.OA+G.OK=0; |
(5) |
∑M y (Frk ) = 0 |
|||
k =1 |
|
|
|
n |
; |
-YA.OA=0. |
(6) |
∑M z (Frk ) =0 |
|||
k =1 |
|
|
|
Розв’язавши систему рівнянь, одержимо: |
|||
ХА=0; YA=0; |
ZA= - G = -5 кН; |
S1= S2= -8,67 кН. |
|
|
|
2 |
|
Задача 4.11.
G=10 кН
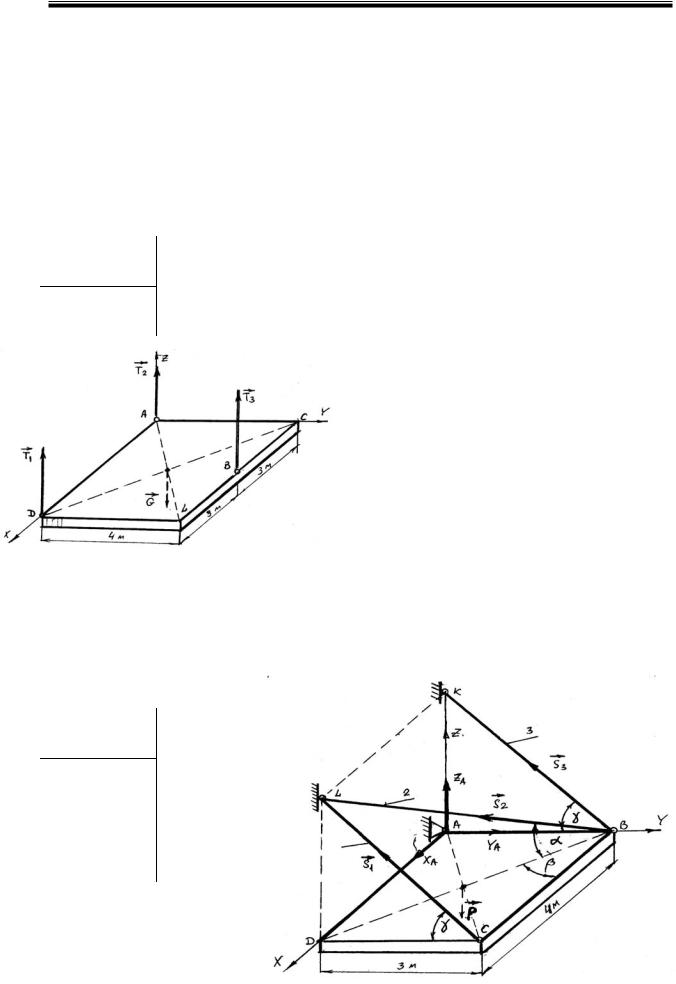
Т1=? Т2=? Т3=?
Однорідна плита ACLD вагою 10 кН підіймається за допомогою трьох вертикальних тросів, закріплених в точках А, В і D. Знайти натяг тросів (рис. 4.19).
У даному разі маємо просторову систему паралельних
сил. Вісь AZ спрямуємоr r паралельно силам T1 , T2 , T3 .
Запишемо рівняння рівноваги плити ACLD (див. формули. (4.20)):
|
n |
; |
Т1+Т2+Т3 – G = 0; |
||
|
∑ Fk z = 0 |
||||
|
k =1 |
|
|
|
|
|
n |
|
; – G . 2 + Т3 |
. 4 = 0; |
|
|
∑M x (Frk ) =0 |
||||
|
k=1 |
|
|
|
|
|
n |
|
; – Т1.6+G . 3 - Т3 |
. 3 = 0. |
|
Рис. 4.19 |
∑M y (Frk ) = 0 |
||||
k =1
Розв’язуючи систему рівнянь, маємо: Т1=Т2=2,5 кН, Т3=5 кН.
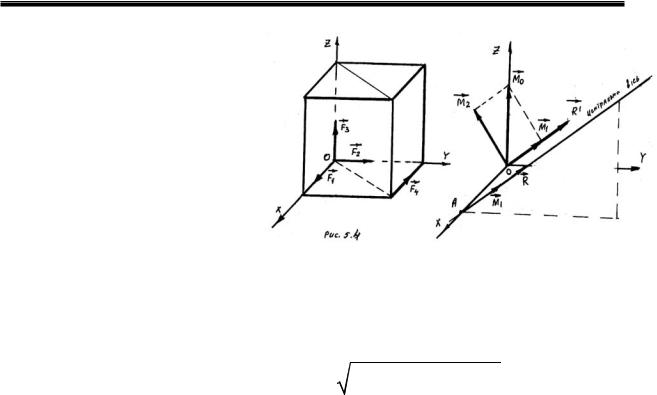
Задача 4.12.
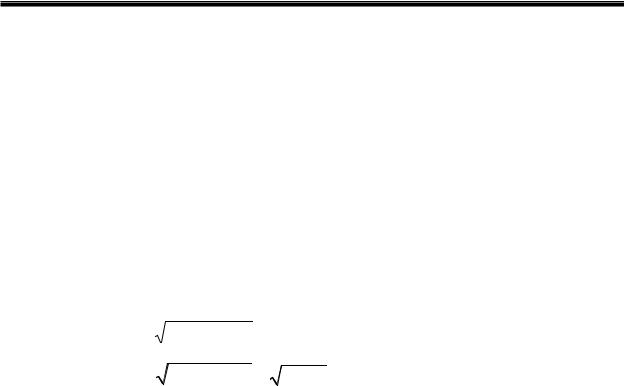
Р=20 кН
S1=?, S2=?, S3=? ХА=?, YА=?, ZА=?
56 |
Рис. 4.20 |
|
Технічна механіка
Однорідна прямокутна плита AВCD вагою 20 кН утримується в горизонтальному положенні стержнями 1, 2, 3, що мають на кінцях шарнірні з’єднання. Крім цього в точці А плита сферичним шарніром з’єднана з нерухомою основою. Знайти реакцію шарніра А і зусилля в стержнях, якщо АК=DL=3м (рис. 4.20).
Розглянемо рівновагу плити AВCD. Для неї в’язями є сферичний шарнір у точці А і стержні 1, 2, 3. Звільнимося від в’язів і замінимо їх дію на плиту реакціями в’язей. Невідому реакцію RrA розкладемо
на складові ХА, YА, ZА. Реакції стержнів напрямлені по стержнях. Отримали просторову довільну систему сил. Перед тим, як скласти рівняння, зробимо деякі обчислення.
З рівнобедреного ∆CDL випливає, що γ =450.
З |
∆DCВ DВ= |
DC 2 + CB 2 |
=5 м. Тоді cos β = |
4 = 0.8; |
sin β = |
3 |
= 0.6 |
|||||||||||||||||
З |
∆DLВ |
ВL= |
|
|
|
|
|
|
|
|
|
|
|
9 +25 =5,83(м) |
5 |
|
|
5 |
|
|||||
|
LD2 + DB2 |
= |
|
|
|
|
|
|
||||||||||||||||
Тоді |
sinα = |
LD = |
|
3 |
|
= 0,51; |
|
cosα = |
DB |
= |
|
5 |
= 0,86 . |
|
|
|||||||||
5,83 |
|
|
|
BL |
5,83 |
|
|
|||||||||||||||||
|
|
|
BL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Запишемо рівняння рівноваги плити: |
|
|
|
|
|
|
|
|||||||||||||||
n |
|
= 0 ; |
ХА+S2cosα |
. |
cos β = 0; |
|
|
|
|
|
|
|
|
(1) |
||||||||||
∑ Fk x |
|
|
|
|
|
|
|
|
|
|||||||||||||||
k =1 |
|
=0 ; |
YА – S1cosγ - S3 cosγ - S2cosα sin β = 0; |
|
(2) |
|||||||||||||||||||
∑n |
Fk y |
|
||||||||||||||||||||||
k=1 |
|
= 0 ; |
ZA – P + S1 sinγ +S3 sinγ + S2 sinα = 0 ; |
|
(3) |
|||||||||||||||||||
∑ Fk z |
|
|||||||||||||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k=1 |
|
|
|
. |
3 – P |
. |
1.5 + S3 sinγ |
. |
|
|
|
. |
3 = 0; |
|
(4) |
|||||||||
n |
|
|
|
|
|
|
|
|||||||||||||||||
∑Mx (Frk ) =0; |
S1 sinγ |
|
|
3 + S2 sinα |
|
|||||||||||||||||||
k=1 |
|
|
- S1 sinγ |
. |
4 + P |
. |
2= 0; |
|
|
|
|
|
|
|
|
(5) |
||||||||
n |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
∑M y (Frk ) =0; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
k=1 |
|
|
- S1 cosγ . 4 - S2cosα .cos β . 3 = 0. |
|
|
(6) |
||||||||||||||||||
∑Mz (Frk ) =0; |
|
|
||||||||||||||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k=1
Зрівняння (5) S1=14,14 кН. З рівняння (6) S2=-19,38 кН.
Зрівняння (4) S3=14кН.
Зрівняння(1), (2) і (3) маємо: ХА= 13,33кН, YА=9,89кН; ZA= 10кН.
57

Частина 1. Теоретична механіка
Задача 4.13.
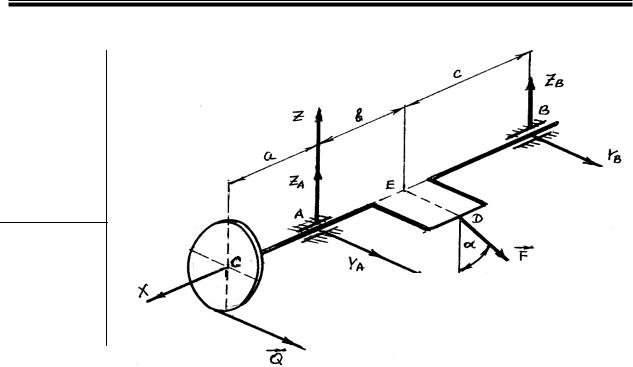
Q = 4 кН G = 6 кН
P = ?,
ХА=?, YА=?, XB=?, YB=?
На валу 1 закріплений барабан 2 і шків 3, на які намотані троси з вантажем Р і Q. Вага вала разом з барабаном і шківом G. Знайти реакції підшипників А і В, якщо Q=4 кН,
G=6 кН, R=5r, а=0,5м. (рис. 4.21)
Розглянемо рівновагу вала СВ. Для нього опорами є підшипники в точках А і В. Невідомі реакції підшипників розкладаються на дві складові в площині, перпендикулярній осі обертання. В точці А – це ХА, ZA, в точці В – ХВ, ZВ.
Сила P діє в площині, перпендикулярній осі обертання.
Рис. 4.21
Запишемо рівняння рівноваги:
n |
|
|
|
|
∑ Fk x |
=0; |
Р cos 450+ХА+ХВ= 0; |
(1) |
|
k=1 |
|
|
|
|
∑n |
Fk y |
= 0 ; |
|
(2) |
k =1 |
|
|
|
|
n |
|
|
– P sin 450+ ZA+ ZВ - G - Q = 0; |
|
∑ Fk z |
=0 ; |
(3) |
||
k=1 |
|
|
P sin 450 . а – G . а – Q . 2а + ZВ . 3а = 0; |
(4) |
∑Mx (Frk ) =0; |
||||
n |
|
|
|
|
k=1 |
|
|
Р R - Q r = 0; |
(5) |
∑M y (Frk ) =0; |
||||
n |
|
|
|
|
k=1 |
|
|
Р cos 450. а - ХВ . 3а = 0. |
(6) |
∑Mz (Frk ) =0 |
||||
n |
|
|
|
|
k=1
Розв’язавши цю систему рівнянь, маємо:
Р=0,8 кН; ХА=-0,76 кН; ZA=6,08кН; ХВ=0,19кН; ZВ=4,49кН.
58
Технічна механіка
Задача 4.14.
α =300 F=20 кН R=0.2м ED=0.15м a=0.15м b=0.2м c=0.25м
Q = ?,
YА=?,
ZА=?,
YB=?,
ZB=?
Колінчатий вал може обертатися в підшипниках А і В. На кінці вала насаджена шестірня радіусом 0,2 м. У точці D коліна під кутом α до вертикалі діє сила F . Коліноr розміщене в горизонтальній площині. Знайти величину сили Q , яка прикладена до шестірні паралельно осі АУ при рівновазі вала, і реакції підшипників (рис. 4.22). F II YAZ .
Розглянемо рівновагу вала САВ. В точках А і В є підшипники. Запишемо рівняння рівноваги:
n |
|
|
|
∑ Fk x =0; |
|
(1) |
|
k=1 |
|
|
|
n |
|
|
|
∑ Fk y |
= 0 ; |
Q + YА + YB + F sinα = 0 ; |
(2) |
k =1 |
|
|
|
n |
= 0 ; |
ZA+ ZВ – F cosα .= 0; |
(3) |
∑ Fk z |
|||
k =1 |
|
|
|
n |
|
Q . R – F cosα . ED.= 0; |
(4) |
∑M x (Frk ) = 0 ; |
|||
k =1 |
|
|
|
n |
|
– F cosα . b + ZB . (b+c)= 0; |
|
∑M y (Frk ) = 0; |
(5) |
||
k =1 |
|
|
|
n |
|
Q . a – F sinα . b - YB. (b+c)= 0. |
|
∑Mz (Frk ) = 0 |
(6) |
||
k =1
Розв’язавши цю систему рівнянь, маємо:
59
Частина 1. Теоретична механіка
YА= -22,9 кН; ZA= 9,62 кН; YВ= - 0,11 кН; ZВ= 7,70 кН; Q = 12,99
кН.
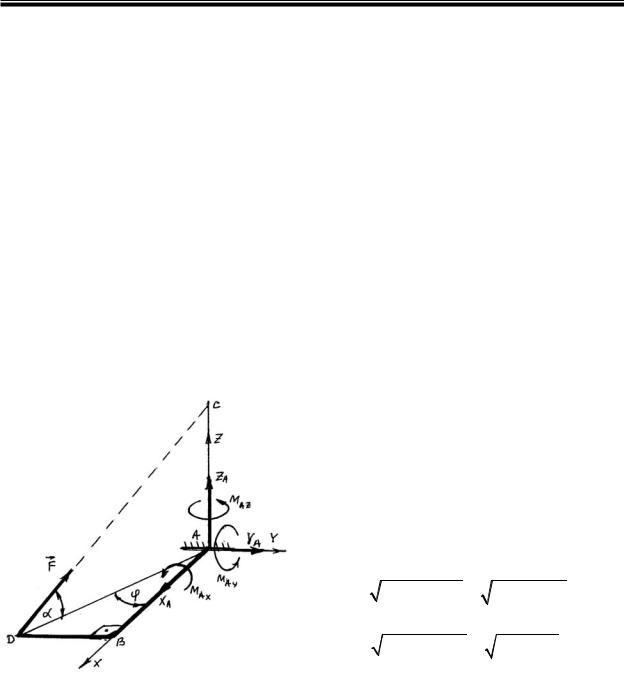
Задача 4.15. |
|
|
|
|
|
|
|
||||
F=50кН |
|
|
Колінчатий стержень АВD в точці А має жорстке |
||||||||
|
|
||||||||||
|
|
защемлення. В точці D стержня по лінії DС діє сила в 50 |
|||||||||
АВ=1,2м |
|
|
|||||||||
DB=1.6м |
|
|
кН. Не враховуючи вагу стержня, знайти реакції |
||||||||
AC=2.1м |
|
|
жорсткого защемлення (рис. 4.23). |
|
|
|
|||||
|
|
|
|
Розглянемо рівновагу стержня АВD. Для нього єдиною |
|||||||
XА=?, |
|
|
|
||||||||
|
|
|
в’яззю |
є опора в |
точці А. |
Це жорстке |
защемлення. |
||||
YА=?, |
|
|
|
||||||||
|
|
|
Защемлення для просторової системи сил створює |
||||||||
ZА=?, |
|
|
|
||||||||
|
|
|
невідому реакцію R |
|
з проекціями на осі координат X , |
||||||
MAx=?, |
|
|
|
|
A |
|
|
r |
А |
||
MAy=?, |
|
|
YА, ZА і пару сил з векторним моментом |
M A , проекції |
|||||||
MAz=?, |
|
|
якого на координатні осі MAx, MAy, MAz (рис. 4.23). |
||||||||
|
|
|
|
У загальному випадку маємо шість невідомих. Для їх |
|||||||
|
|
|
|
|
|
|
знаходження складемо шість |
||||
|
|
|
|
|
|
|
рівнянь рівноваги просторової |
||||
|
|
|
|
|
|
|
системи сил. |
|
|
|
|
|
|
|
|
|
|
|
Перед тим, як скласти рівняння |
||||
|
|
|
|
|
|
|
рівноваги, зробимо деякі |
|
|||
|
|
|
|
|
|
|
обчислення: |
|
|
|
|
|
|
|
|
|
|
|
AD = AB2 + DB2 = 1, 22 +1,62 = 2 (м) |
||||
|
|
|
|
|
|
|
|
. |
|
|
= 2,9(м). |
|
|
|
|
|
|
|
DC = |
AD2 + AC2 = |
22 + 2,12 |
||
|
|
|
|
|
Рис. 4.23 |
|
sinα = |
AC = 0,72 ;cosα = AD = 0,69 ; |
|||
|
|
|
|
|
|
|
DC |
DC |
|
||
|
|
|
|
|
|
|
sinϕ = DB = 0,8 ; cosϕ = |
AB |
= 0,6 . |
||
|
|
|
|
|
|
|
AD |
||||
|
|
|
|
|
|
|
|
AD |
|
|
|
n |
|
; |
|
|
XА – F cosα cosϕ = 0; |
|
|
|
|
||
∑ Fk x = 0 |
|
|
|
|
|
|
|||||
k =1 |
|
|
|
|
|
|
|
|
|
|
|
n |
|
; |
|
|
YА + F cosα sinϕ = 0; |
|
|
|
|
||
∑ Fk y |
= 0 |
|
|
|
|
|
|
||||
k =1 |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
ZA+ F sin.α = 0; |
|
|
|
|
||
∑ Fk z |
= 0; |
|
|
|
|
|
|||||
k =1 |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
MAx – F sinα . DВ .= 0; |
|
|
|
|
||
∑M x (Frk ) = 0 ; |
|
|
|
|
|||||||
k =1
60