

Rudenko_O.G.Teormeh_1
.pdfТехнічна механіка
S2 = −0,77 кН.
Рис. 2.10 |
Рис. 2.11 |
Задача 2.9.
Знайти зусилля в стержнях просторового кронштейна, якщо в точці А діють дві сили. Сила P1 =10kH діє в горизонтальному
напрямі, а сила P2 = 20kH - вертикально вниз. Стержні невагомі, мають на кінцях шарнірні з’єднання (рис. 2.12).
Відповідь: S1 = S2 = 44,6kH; S3 = −40kH .
Задача 2.10.
Три невагомих стержня АВ, АС, AD шарнірно з’єднані в точці А і шарнірно прикріплені до горизонтальної площини (рис. 2.13) Площини трикутників АВС і АОD вертикальні і взаємно перпендикулярні. До вузла А паралельно ОD діє сила Р=0,6 kH. Знайти зусилля в стержнях, якщо ABO = ACO = 450 , ADO = 600 .
Рис. 2.12 |
21 |
Рис. 2.13 |
Частина 1. Теоретична механіка
Відповідь: SB = SC = 0,735kH; SD = −1,20kH .
3. Момент сили. Пара сил
У цьому розділі розглянемо систему пар сил, які довільно розміщені в одній площині та в просторі. Введемо нові поняття: момент сили відносно точки, осі, пара сил.
3.1. Момент сили відносно точки на площині й у просторі
Під дією сили тіло може рухатися поступально або обертатися. Обертальна дія сили виражається моментом сили.
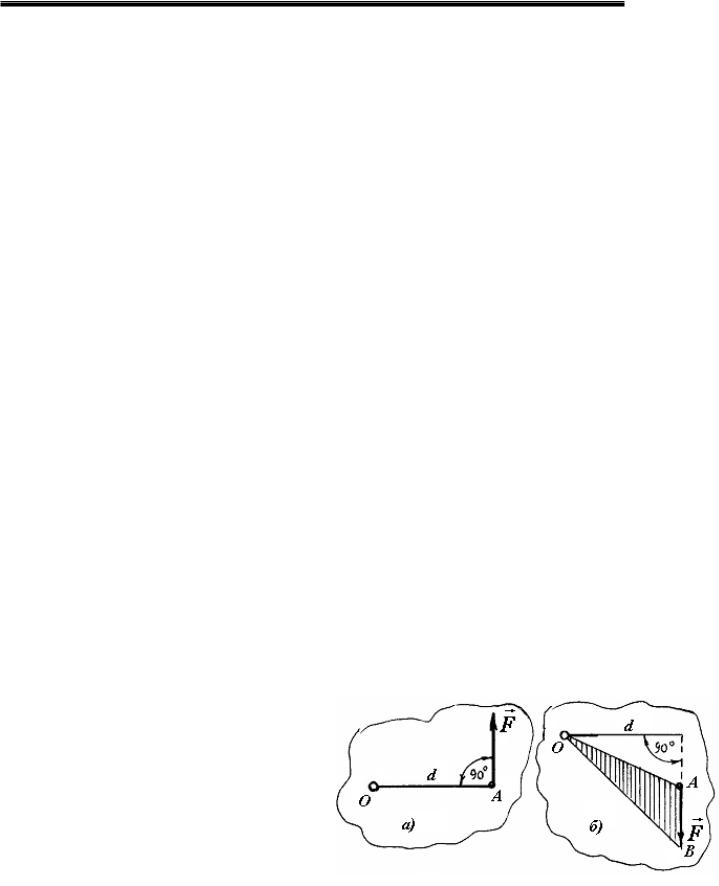
Момент сили відносно точки О дорівнює добутку модуля сили на плече.
|
Плече – це найкоротша відстань лінії дії сили до точки О (рис. |
||||||||||||||
3.1). |
|
|
|
|
|
|
|
|
|
|
|
|
Mо(Fr) =±Fd . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.1) |
|
|
Якщо обертальний рух тіла під |
|
|||||||||||||
дією |
момента |
сили |
виконується |
|
|||||||||||
проти ходу годинникової стрілки, |
|
||||||||||||||
то цей момент має знак “+” |
(рис. |
|
|||||||||||||
3.1, |
|
|
а), |
|
|
|
якщо |
за |
ходом |
|
|||||
годинникової стрілки – то знак “-” |
|
||||||||||||||
(рис 3.1, б). |
|
|
|
|
|
|
|
|
|||||||
|
Розмірність |
|
момента |
сили |
Рис 3.1 |
||||||||||
[ |
Mо |
] |
= |
[ |
F |
] |
|
[ |
d |
] |
= |
|
|
|
|
|
|
|
|
|
|
Н м. |
|
|
|
||||||
З рисунка 3.1, б видно, щоur |
= 2 пл∆OAB . |
(3.2) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Mо(F) |
||
22
Технічна механіка
Звернемо увагу на такі властивості момента сили відносно точки:
1.Момент сили відносно точки не зміниться при перенесенні точки прикладання сили вздовж її лінії дії, тому що при цьому не змінюється ні модуль сили, ні довжина його плеча.
2.Момент сили відносно точки дорівнює нулю тільки тоді, коли модуль сили дорівнює нулю, або коли лінія дії сили перетинає цю точку, (тому, що в цьому разі довжина плеча дорівнює нулю).
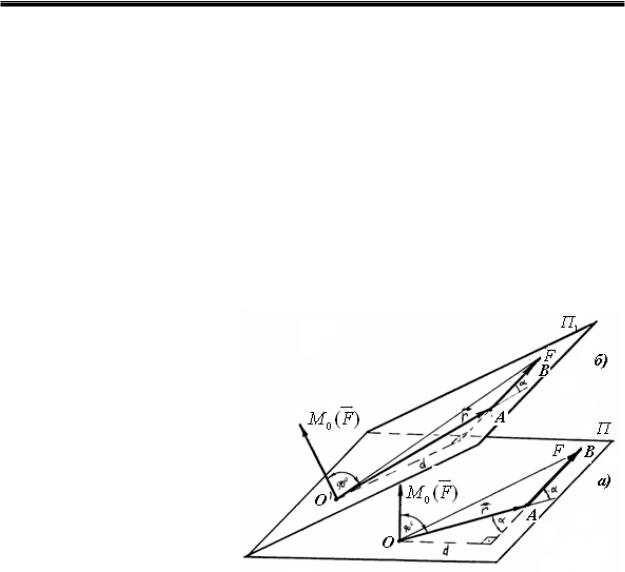
Момент сили відносно точки в просторі. |
r |
Якщо, дивлячись на площину П, бачимо, що сила |
F |
намагається повернути тіло відносно точки О проти ходу
годинникової стрілки, то |
|
|
|
|||||
цей момент |
вважається |
|
|
|
||||
додатнім, якщо за ходом |
|
|
|
|||||
годинникової стрілки, то |
|
|
|
|||||
- від’ємним. |
|
|
|
|
|
|||
|
|
На рис. 3.2., а) цей |
|
|
|
|||
момент |
сили |
додатній. |
|
|
|
|||
Нехай |
площина |
П |
|
|
|
|||
повернулася |
на деякий |
|
|
|
||||
кут і зайняла положення |
|
|
|
|||||
П1 (рис. 3.2,б). Числове |
|
|
|
|||||
значення момента |
сили |
Рис. 3.2 |
|
|
||||
не |
|
urзмінилося, |
тобто |
|
|
|
||
M |
0 |
(F) = Fd . Треба з’ясувати знак цього момента сили . Дивлячись з |
||||||
|
|
|
|
|
П1 бачимо, що сила |
ur |
|
|
одного |
боку |
на площину |
F |
намагається |
||||
повернути тіло відносно точки О проти ходу годинникової стрілки, ur
а дивлячись з іншого боку бачимо, що сила F намагається повернути тіло відносно точки О за ходом годинникової стрілки. Тож звідки дивитися на площину П1 ? Уr зв’язку з цим вводиться
таке поняття, як вектор-момент сили F відносно точки О. Цей uur ur
вектор-момент має таке позначення: M0 (F) . r
Вектор-момент сили F відносно точки О має початокr у
точці О, перпендикулярний площині, в якій перебуває сила F та точкаur(центр) О, і напрямлений у той бік, звідки видно намагання
сили F повернути тіло навколо точки О проти ходу годинникової стрілки (рис. 3.2).
23
Частина 1. Теоретична механіка
Вектор-момент сили можна подати у вигляді векторного
добутку |
uuur |
ur r |
ur |
, |
(3.3) |
|
M0 |
(F) = r |
×F |
де r - радіус-вектор точки А прикладання сили, проведений з точки
О. Перевіримо, чи можна з формули (3.3) одержати формулу (3.2). |
||
uuur ur |
r ur |
|
| M0 (F) |= rF sin(r, F) = Fr sinα = Fd = 2S∆OAB . |
(3.4) |
|
Таким чином, вектор-момент повністю визначає обертальний ur
ефект сили F відносно точки О: його лінія дії визначає площину обертання, його напрям – напрям обертання, його модуль – інтенсивність обертальної дії.
3.2. Момент сили відносно осі
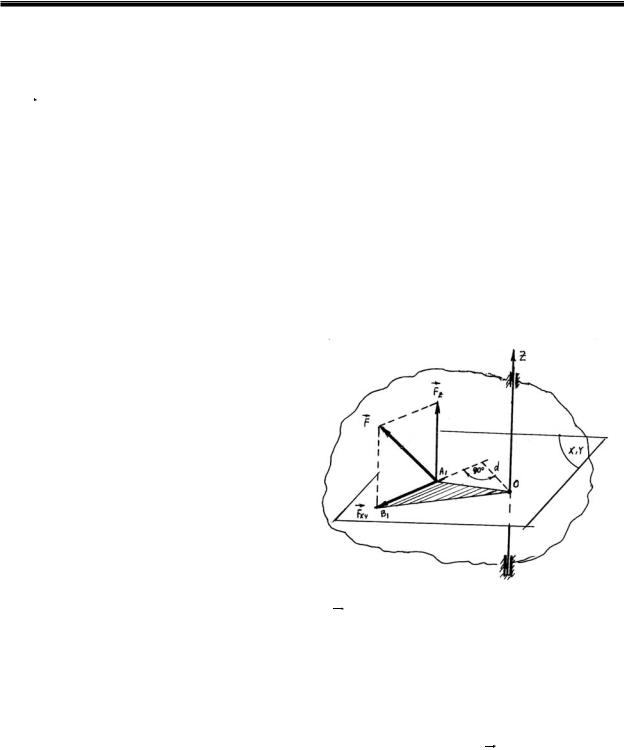
Нехай тверде тіло під дією сили |
|
|
|
|
|
||||||||
ur |
обертається |
навколо |
осі |
Z |
|
|
|
|
|
||||
F |
|
|
|
|
|
||||||||
(рис. 3.3). Через точку |
A1 при- |
|
|
|
|
|
|||||||
кладання сили проведемо пло- |
|
|
|
|
|
||||||||
щину XY, перпендикулярну осі |
|
|
|
|
|
||||||||
Z. Ця площина перетинає вісь Z |
|
|
|
|
|
||||||||
у точці О. |
Розкладемо силу |
r |
|
|
|
|
|
|
|||||
F |
|
|
|
|
|
|
|||||||
на дві складові: |
uur |
паралельну |
|
|
|
|
|
||||||
Fz |
|
|
|
|
|
||||||||
осі |
Z, |
і |
uuur |
що |
лежить |
у |
|
Рис. 3.3 |
|
|
|||
Fxy , |
|
uur |
|
||||||||||
площині |
XY і є проекцією сили |
|
|
|
|
||||||||
F |
на цю площину. СилаFz |
не |
|||||||||||
може повернути тіло навколо осі Z, а може тільки зміщувати його |
|||||||||||||
вздовж осі обертання. Тому її обертальний ефект відносно осі Z (осі |
|||||||||||||
обертання) |
дорівнює нулю. |
Весь |
|
обертальний |
ефект |
сили |
r |
||||||
|
F |
||||||||||||
зосереджений у силі |
uuur |
. Сила |
uur |
і точка О, що належить осі Z, |
|||||||||
Fxy |
Fxy |
||||||||||||
перебувають в одній площині. |
Тому момент сили F відносно осі |
||||||||||||
обертання Z буде: |
uuur |
|
uuur |
|
|
|
|
||||||
|
|
|
ur |
|
= Fxy d = 2S∆OA B . |
(3.5) |
|||||||
|
|
|
M z (F) = M z (Fxy ) = M0 (Fxy ) |
||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
Таким чином, момент сили відносно осі дорівнює моменту проекції цієї сили на площину, перпендикулярну до даної осі, відносно точки перетину осі з площиною.
Щоб знайти момент сили відносно будь-якої осі Z, необхідно:
1.Провести площину XY, перпендикулярну осі Z, і знайти точку
Оперетину осі з площиною.
24
Технічна механіка
2.Спроектувати силу F на цю площину і знайти її проекцію Fuurxy .
3.Знайти момент сили Fuurxy відносно точки О.
4.Встановити знак момента сили.
Щоб встановити знак момента сили відносно осі, необхідно дивитися на площину XY з додатного напряму осі. Якщо при цьому обертальний рух тіла бачимо таким, що відбувається проти ходу годинникової стрілки, то цей момент сили додатній, якщо за ходомurгодинникової стрілки, то - від’ємний. На рис. 3.3 момент
сили F відносно осі Z є додатнім.
r
Примітка. Момент сили F відносно осі дорівнює нулю в двох випадках:
ur
1. Якщо лінія дії сили F перетинає вісь;
r
2. Якщо сила F паралельна даній осі.
В усіх інших випадках момент сили відносно осі існує.
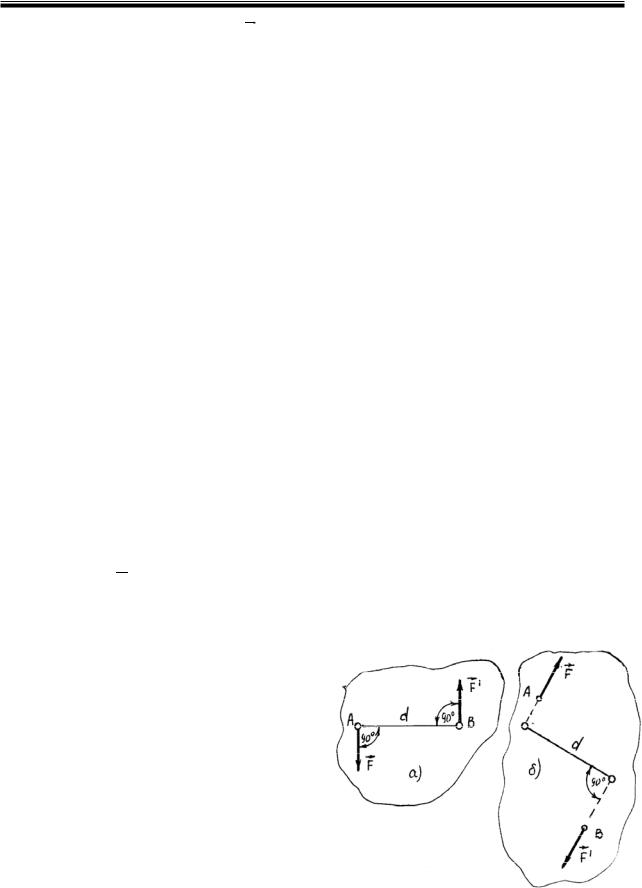
3.3. Пара сил. Момент пари сил
Пара сил – це дві сили, що рівні за величиною, протилежно напрямлені, лінії дії їх паралельні й перебувають на відстані d одна
від одної (рис. 3.4). uur ur
F = −F / d –плече пари сил.
Під дією пари сил тіло буде обертатися. Якщо під дією пари сил тіло буде обертатися проти ходу годинникової стрілки, то цей момент пари сил має знак “+” (рис. 3.4, а), якщо за ходом годинникової стрілки – то знак момента “-” (рис. 3.4,б).
Теорема 3.1. (Теорема про момент пари сил)
25

Частина 1. Теоретична механіка
Момент пари сил дорівнює добутку однієї із сил пари на плече пари сил.
Доведення. Нехай сили |
M ur=±Fd . |
(3.6) |
||||||
F і F / |
складають |
|
||||||
пару сил (рис 3.5) |
ur |
uur |
відносно |
довільної |
|
|||
Моменти сил |
F |
і F / |
|
|||||
точки О будуть: |
|
|
(а) |
|
|
|||
|
M1 = F AO |
|
|
|||||
|
M |
2 |
= −F / BO |
(б) |
r |
|
||
|
|
|
|
|
|
|
||
uurЗнайдемо алгебраїчну суму моментів сил F |
|
|||||||
і F / , що складають пару сил, відносно точки |
Рис 3.5 |
|||||||
О. |
|
|
|
|
BO=F(AO−BO) =−F d . |
|
||
M =M +M =F AO−F/ |
|
|||||||
1 |
2 |
|
|
|
|
|
|
|
Таким чином, сума моментів сил, що складають пару сил, не залежить від вибору точки О, а вираз M = ±F d - є характеристикою обертального моменту пари сил.
r |
Для пари сил, розміщених у просторі, вводиться вектор-момент |
||||
M |
пари сил. |
uur |
пари сил |
|
|
|
Вектор-момент |
M |
|
||
перпендикулярний площині, в якій |
|
||||
діє пара сил, і напрямлений у той |
|
||||
бік звідки видно, що обертальний |
|
||||
рух тіла під дією пари сил |
|
||||
відбувається проти ходу годинни- |
|
||||
кової стрілки (рис. 3.6). |
|
|
|
||
|
Вектор-момент |
uur |
можна |
|
|
|
M |
Рис. 3.6 |
|||
записати у вигляді векторного |
|||||
добутку |
uur |
uuur |
ur |
(3.7) |
|
|
|
M |
= AB |
×F . |
|
Доведемо, що із формули (3.7) можна вивести формулу (3.6) |
|||||
|
uuur |
|
uuur |
ur |
= AB F . |
|
| M | = AB F sin(AB, F) = AB F sin 900 |
||||
3.4. Теореми про пари сил
Раніше було доведено, що силу можна переносити по лінії її дії й від цього дія сили на тіло не зміниться.
Виникає два запитання:
26
Технічна механіка
1)Чи зміниться дія сили на тіло, якщо її перенести паралельно самій собі?
2)Чи зміниться дія пари сил на тіло, якщо її перенести в інше місце в площині її дії?
Відповіді на ці запитання дають теореми 3.2 і 3.3.
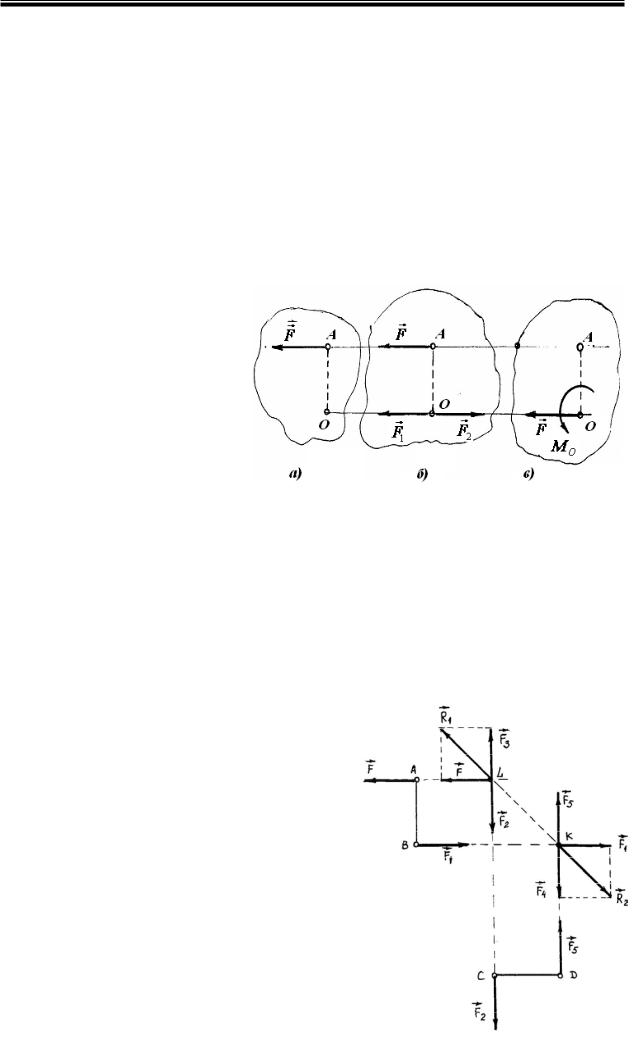
Теорема 3.2. Силу можна перенести паралельно самій собі, якщо до цієї сили приєднати пару сил, момент якої дорівнює моменту сили відносно точки, куди переносять цю силу.
|
Доведення. |
Нехай |
у |
|
|
|
|
||
|
|
|
ur |
|
|
|
|
|
|
точці А діє сила F (рис. |
|
|
|
|
|||||
3.7,а). У точці О |
|
|
|
|
|||||
прикладемо |
|
urдві |
|
|
|
|
|||
зрівноважені сили |
F1 |
і |
|
|
|
|
|||
uur |
, причому |
F1 = F2 = F |
|
|
|
|
|||
F2 |
|
|
|
|
|||||
(рис. 3.7, б). Це можна |
|
|
|
|
|||||
зробити згідно з аксіомою |
|
|
|
|
|||||
2. |
Ми |
маємо |
вже |
три |
Рис. 3.7 |
|
|
|
|
|
|
|
ur |
|
ur |
|
|
|
|
сили, з яких сили F |
і F2 |
|
|
ur |
діє вже в |
||||
складають пару сил. З рисунка 3.7, б) видно, що сила |
F |
||||||||
точці О, |
і, крім цього, |
є пара сил з моментом |
M = F AO. Щоб |
||||||
щоразу не малювати пару сил, домовимося показувати її стрілкою, як на рис. 3.7, в).
Теорема 3.3. Пару сил можна переносити в площині її дії і від цього її дія на тіло не зміниться.
Доведення. Нехай у площині діє пара сил з плечем АВ. Момент пари M =+F AB. Візьмемо в довільному
місці на цій площині відрізок CD=AB і на це місце перенесемо паруr urсил.
Спочатку перенесемо сили F і F1 по
лінії їх дії в точки L і К. Від цього дія сил на тіло не зміниться. Приєднаємо до цих сил у точках К і L
Частина 1. Теоретична механіка |
|
|
|
|
|
|
||||||
|
|
|
|
|
ur |
|
uur |
, |
ur |
uur |
, причому F |
= F = F = F = F . |
зрівноважені сили F 2 |
= −F |
F 5 = −F |
||||||||||
|
Дію |
сил |
ur |
і |
uur |
3 |
|
|
4 |
2 |
3 4 5 |
|
uur |
F |
F |
замінимо |
силою |
|
|||||||
ur |
uur |
|
|
|
3 |
uur |
|
ur |
|
|
|
|
R1 |
= F + F3 , |
а дію сил |
F1 |
і |
F4 - |
силою |
|
|||||
uur |
ur |
uur |
. Сили |
ur |
|
uur |
- |
зрівноважені |
|
|||
R2 |
= F1 |
+ F2 |
R1 |
= −R2 |
|
|||||||
і їх можна відкинути. Залишаються сили |
|
|||||||||||
uur |
uur |
|
|
|
|
|
|
|
|
|
|
|
F2 |
і F5 |
, які по лінії їх дії переносимо в |
|
|||||||||
точки С і D. Одержали пару сил, момент
якої M2 = F2 CD , що збігається з момен-
том M1 як за величиною, так і за знаком.
У наведеному вище при розгляді пар сил, розміщених в одній площині, було доведено, що пару сил можна переміщувати в площині її дії і від цього дія її на
тіло не зміниться. А чи можна переносити пару сил в площину, паралельну тій, в якій вона діяла? На це запитання дає відповідь теорема 3.3.
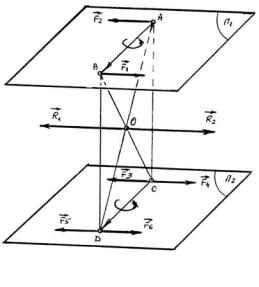
Теорема 3.3. Пару сил можна перенести в паралельну площину і від цього дія пари сил на тіло не зміниться.
Нехай у площині П1 діє пара сил з моментом M1 = AB F1 і
обертальний рух її проти ходу годинникової стрілки. Розглянемо площину П2 , що паралельна П1 . Візьмемо на цій площині відрізок
CD=AB (рис. 3.9). У точках С і D прикладемо зрівноважені сили,
причому F3 = F4 = F5 |
= F6 |
= F2 = F1 . Від цього стан тіла не зміниться. |
|||||||
|
|
|
|
uur |
uur |
uur |
ur |
|
|
Розглянемо сили F |
і F |
, F і |
F . Їх дію можна замінити силами |
||||||
uur |
uur |
uur |
uur |
uur 2 |
uur 5 |
1 |
4 |
uur |
ur |
R1 |
= F2 |
+ F5 |
і R2 |
= F1 + F4 . Ці сили прикладені в точці О. Сили R1 |
іuurR2 |
||||
зрівноважені, тож їх можна відкинути. У нас залишилися сили F і |
|||||||||
uur |
|
|
|
|
|
|
|
|
3 |
F6 |
, які |
складають |
пару |
сил. Момент |
цієї пари |
сил |
|||
M2 =CD F6 = AB F1 = M1 . Знак цієї пари також не змінився. Теорему доведено.
Визначення. Дві пари сил, що діють у просторі, еквівалентні, uur uuur
якщо в них однакові вектори-моменти, тобто M1 = M2 .
28

Технічна механіка
Якщо вектори-моменти пар сил однакові, то це означає, що ці пари сил перебувають в паралельних площинах і обертальний рух їх однаковий. Згідно з теоремою 3.3 ці пари сил можна привести до однієї площини. Крім цього, у цих пар сил однакові числові
значення моментів сил. |
|
||
uuuur |
uuur |
|= d2 F2 , де d1 |
і d2 - |
| M1 | = d1F1 |
; | M2 |
||
відповідно плечі першої і другої пари сил.
У цих пар сил можуть бути різні плечі і сили, але добутки сили на плече пари, однакові.
Теорема 3.4. Дві пари сил, що лежать у площинах, що перетинаються, еквівалентні одній парі сил, момент якої дорівнює геометричній сумі векторівмоментів двох даних пар сил.
uuur |
|
Нехай у площиніП |
перебуває пара сил, вектор-момент якої |
||
|
1 |
|
uuur |
|
|
M1 |
, |
а в площині П2 - пара сил, вектор-момент якої |
M2 |
. На лінії |
|
перетину цих площин візьмемо відрізок АВ і приведемо ці пари сил
до загального плеча АВ (рис. 3.10). |
|
uur |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
uur |
|
uuur |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
M1 |
= |
AB |
×F1; |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
uuur |
|
uuur |
|
uur |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
uuur |
|
M2 |
= |
|
AB |
×F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П , а вектор- |
|||||||||
|
Вектор-момент M |
|
перпендикулярний площині |
|
|||||||||||||||||||||||||
|
uuur |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
uur |
|
uur 1 |
|
|
|
|
|
||||||
момент M |
2 |
- площині П |
. У точці А діють сили F ' |
і F ' , а в точці В |
|||||||||||||||||||||||||
|
uur |
|
uur |
|
|
|
2 |
|
ur |
|
|
|
|
|
|
|
ur |
1 |
uur |
2 |
uur |
|
|
|
ur |
||||
|
і |
|
|
|
ur |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
– сили F |
F . Дію сил |
|
F |
і |
F |
замінимо силою R |
|
= F |
+ F |
, а сил F ' |
|||||||||||||||||||
uur |
1 |
|
|
2 |
ur' |
uur |
1 |
2 |
ur |
|
|
ur |
|
1 |
|
|
1 |
|
2 |
|
|
|
1 |
||||||
|
|
|
uur |
. Сили |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
і F ' |
- силою R |
= F1 |
+ F |
' |
R |
|
і R |
складають пару сил, що діє в |
|||||||||||||||||||||
2 |
|
|
|
2 |
|
2 |
|
|
|
1 |
|
|
2 |
ur |
|
цієї пари сил. |
|
|
|
|
|
|
|
||||||
площині П. Знайдемо вектор-момент M |
|
uur |
uuur |
uur |
|
||||||||||||||||||||||||
|
|
|
|
uur |
uuur |
uur |
|
uuur |
uur |
|
uur |
|
|
uuur uur |
uuur |
|
. |
||||||||||||
|
|
|
|
M = AB ×R = AB ×(F + F ) = (AB ×F ) +(AB ×F ) = M |
|
+ M |
|
||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
ur |
2 |
uuur |
uuur 1 |
|
|
|
|
|
2 |
|
1 |
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
M |
= M1 |
+ M2 . |
|
|
|
|
|
|
|
|
(3.7) |
||||||
Теорему доведено.
29
Частина 1. Теоретична механіка
Якщо на тіло діє n пар сил, що лежать у різних площинах, то цю систему пар сил можна замінити однією парою сил з вектором-моментом
uur |
uuur |
uuur |
uuur |
n uuur |
|
M |
= M1 |
+ M2 |
+... + Mn |
= ∑Mk . |
(3.8) |
k=1
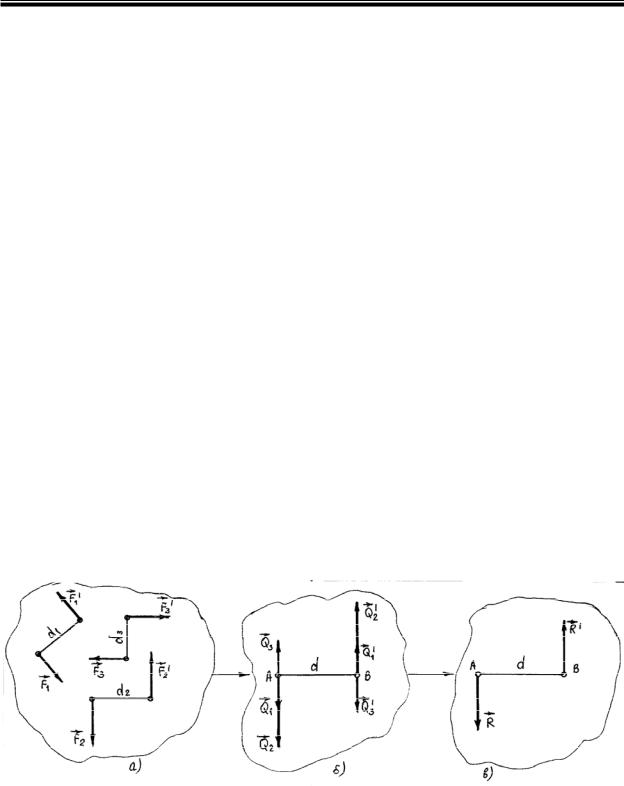
Теорема 3.5. Теорема про додавання пар сил, розміщених в одній площині.
Якщо в одній площині діє декілька пар сил, то їх дію можна замінити дією однієї пари сил, момент якої дорівнює алгебраїчній сумі моментів заданих пар сил.
Доведення Нехай на тверде тіло в одній площині діє три пари
сил з моментами: M1 = F1d1 , M2 = F2d2 , M3 = −F3d3 . (рис. 3.11, а). Перетворимо ці пари в еквівалентні з плечем d=АВ
M1 = F1d1 =Q1d M2 = F2d2 =Q2d
M3 = −F3d3 = −Q3d .
Перенесемо сформовані еквівалентні пари до плеча АВ. У точці |
||||||
|
uur |
uur |
uuur |
|
|
ur uur uur |
А будуть сили Q1 |
, Q 2 , |
Q 3 |
, а в точці В - Q1/ , Q 2/ , Q 3/ (рис 3.11, |
|||
б). Ці сили |
діють по прямим лініям і їх дію замінимо силами, |
|||||
модулі яких |
R =Q1 |
+Q2 −Q3 , а R′=Q/1 +Q/ |
2 −Q/ |
3 (рис 3.11, в). |
||
Рис 3.11 ur ur
Ці сили складають пару сил (R, R/ ) з плечем АВ=d. Знайдемо момент цієї пари сил.
M =R d =(Q1 +Q2 −Q3) d =Q1d +Q2d −Q3d =M1 +M2 −M3 .
Це і треба було довести.
Якби задана система пар сил мала п пар, розміщених в одній площині, то одержали б одну рівнодійну пару сил з моментом
30