

Ускорение
Ускорение характеризует быстроту изменения скорости.
При векторномспособе описания среднее ускорение равно отношению изменения скорости к тому промежутку времени, за который это произошло это изменение:
![]()
При координатномспособе описаниясредниезначенияпроекций ускоренияопределяются следующими выражениями:
![]() ,
,![]() .
.
Чтобы перейти к мгновеннымзначениям ускорения, следует устремитьt 0.
![]() ,
,
т.е. ускорение равно производной вектора скорости по времени. Аналогичными выражениями определяются проекции вектора ускорения:
![]() ,
,![]() .
.
Модульвектора мгновенного ускорения
легко находится по теореме Пифагора.
При двумерном движении![]() .
.
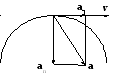
Перейдем к естественномуспособу описания движения. Поскольку скорость может изменяться как по величине, так и по направлению, с каждым из этих изменений связана составляющая вектора полного ускорения.
Составляющая ускорения, характеризующая быстроту изменения скорости по величине, называетсятангенциальным ускорением. Она связана с приращением вектора скорости, направленным по касательной к траектории, как и сама скорость. При ускоренном движении тангенциальная составляющая совпадает с вектором скорости, при замедленном - противоположна. Величина тангенциального ускорения равна производной от модуля вектора скорости по времени:
![]() .
.
Составляющая ускорения, характеризующая быстроту изменения скорости по направлению, называетсянормальным ускорением. Она связана с приращением вектора скорости, направленным перпендикулярно касательной к траектории и равна
![]()
 ,
,
где R- радиус кривизны траектории. Нормальное ускорение всегда направлено к центру кривизны траектории:
Вектор полного ускорения
![]()
Его модуль легко найти по теореме Пифагора:
![]() .
.
1.3. Кинематика вращательного движения Положение точки при ее движении по окружности
П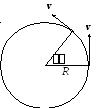 ри
вращательном движении по окружности
радиусаRее положение
можно задатьугловой координатой(t),а ее перемещение - изменением угловой
координаты=(t+t)- (t).
ри
вращательном движении по окружности
радиусаRее положение
можно задатьугловой координатой(t),а ее перемещение - изменением угловой
координаты=(t+t)- (t).
Бесконечно малый угол поворота d можно рассматривать какпсевдовектор, направление которого связано с направлением вращения правилом правого винта (или правилом буравчика). При движении по часовой стрелкеd направлен перпендикулярно плоскости рисунка “от нас”, при движении против часовой стрелки - “к нам”.
Число оборотовпри вращательном
движении связано с углом поворота
соотношением:
![]() .
.
Угловая скорость
Угловая скорость характеризует быстроту вращения. Средняя угловая скоростьравна отношению угла поворота к тому промежутку времени, за который произошел этот поворот:
![]() .
.
Мгновенная угловая скоростьравна производной угловой координаты по времени:
![]() .
.
Это псевдовектор, его направление связано с направлением вращения правилом буравчика.
Нередко вместо угловой скорости вводится частота вращения n, т.е. число оборотов за единицу времени, а также (в случае равномерного вращения) период T, т.е. время одного оборота.
![]() .
.
Угловое ускорение
Угловое ускорение характеризует быстроту изменения угловой скорости. Среднее угловое ускорениеравно отношению изменения угловой скорости к тому промежутку времени, за который произошло это изменение:
![]() .
.
Мгновенное угловое ускорениеравно производной от угловой скорости по времени:
![]() .
.
Угловое ускорение - тоже псевдовектор; его направление совпадает с вектором угловой скорости при ускоренном вращении и противоположно ему - при замедленном вращении.
Связи между линейными и угловыми величинами
Движение по окружности - частный случай движения по криволинейной траектории. Поэтому оно характеризуется не только угловыми величинами - углом поворота, угловой скоростью и угловым ускорением, но и теми величинами, которые были введены при естественном способе описания, - криволинейной координатой s, скоростью, нормальным и тангенциальным ускорениями. Линейные и угловые величины связаны соотношениями:
![]()
![]() ;
;![]() ;
;
![]() ;
; ![]() .
.
2. Законы динамики
2.1. Основные определения
Физические величины, характеризующие модели объектов
Масса m - мера инертности материальной точки или твердого тела при его поступательном движении.Инертностьюназывается свойство тел оказывать сопротивление при попытках привести его в движение или изменить величину или направление его скорости.
Момент инерции J
- мера инертности при вращательном
движении. Момент инерции материальной
точки, находящейся на расстоянииrот оси вращенияz, определяется
формулой![]() . Момент инерции твердого тела как
системы материальных точек равен
. Момент инерции твердого тела как
системы материальных точек равен![]() .
Выражения для моментов инерции некоторых
однородных твердых тел приведены в
таблице 3:
.
Выражения для моментов инерции некоторых
однородных твердых тел приведены в
таблице 3:
Моменты инерции твердых тел Таблица 3
|
Твердое тело |
Ось вращения |
Момент инерции |
|
Шар радиуса R |
Проходит через центр шара |
2/5
|
|
Сплошной цилиндр радиуса R |
Совпадает с осью цилиндра |
1/2
|
|
Полый тонкостенный цилиндр радиуса R |
Совпадает с осью цилиндра |
|
|
Тонкое кольцо радиуса R |
Совпадает с осью кольца |
|
|
|
Совпадает с осью диска |
1/2 |
|
Тонкий диск радиуса R |
Совпадает с диаметром диска |
1/4 |
Продолжение таблицы 3
|
Твердое тело |
Ось вращения |
Момент инерции |
|
Тонкий стержень длины l |
Перпендикулярна стержню и проходит через его центр |
1/12 |
|
|
Перпендикулярна стержню и проходит через его конец |
1/3 |
Момент инерции относительно произвольной
оси в ряде случаев можно рассчитать по
теореме Штейнера:
![]() ,
т.е.момент инерции J относительно
произвольной оси z равен
моменту инерции
,
т.е.момент инерции J относительно
произвольной оси z равен
моменту инерции
![]() относительно оси
относительно оси![]() ,
параллельной данной и проходящей через
центр масс С тела, плюс произведение
массы m тела на
квадрат расстояния d между осями.
,
параллельной данной и проходящей через
центр масс С тела, плюс произведение
массы m тела на
квадрат расстояния d между осями.