

2.3 Исследование функции ущерба.
Проведем исследование полученной функции ущерба.
Для удобства дальнейших выкладок будет целесообразно упростить функцию, т.е. раскрыть скобки и перемножить слагаемые:

Найдем область определения функции:

Укажем вид функции:
 – функция общего вида;
– функция общего вида;Исследуем функцию на монотонность.
Найдем
первую производную функции
 и точки экстремума:
и точки экстремума:

Отсюда получаем:
 или
или
Из
первого сомножителя следует, что

А
из второго сомножителя получаем, что

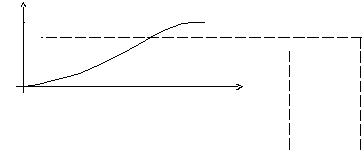
Построим ось координат и отметим на ней точки экстремума (Рис. 14.)
Рис.
14. Области возрастания и убывания функции
 .
.
Принимая
во внимание тот факт, что время жизни
системы определяется параметром
 ,
т.е. система будет существовать ровно
,
т.е. система будет существовать ровно времени, то посмотрев на данный рисунок
(рис. 14.) можно сказать, что функция ущерба
будет монотонно возрастающей и область
определения её будет
времени, то посмотрев на данный рисунок
(рис. 14.) можно сказать, что функция ущерба
будет монотонно возрастающей и область
определения её будет
Исследуем функцию на выпуклость и вогнутость.
Для
этого сначала найдем вторую производную
функции
 .
.

Отсюда получаем:
 или
или
Из
первого сомножителя следует, что

А
из второго сомножителя получаем
следующее:

Построим ось координат и отметим на ней точки экстремума (Рис. 15.).

Рис.15.
Области выпуклости и вогнутости функции
 .
.
Так
как вторая производная функции
 равна первой производной функции
равна первой производной функции т.е.
т.е. и функция
и функция была полностью исследована, то доказывать
объективность этого рисунка (рис. 15.) мы
не будем. Раннее это было уже доказано.
была полностью исследована, то доказывать
объективность этого рисунка (рис. 15.) мы
не будем. Раннее это было уже доказано.
Отметим,
что на промежутке
 функция
функция – вогнутая, а на промежутке
– вогнутая, а на промежутке функция
функция – выпуклая.
– выпуклая.
Исследуем функцию на наклонные асимптоты.

где
 .
.
Так
как
 ,
то наклонных асимптот не существует.
,
то наклонных асимптот не существует.
Найдём кривизну функции.

Посчитаем
кривизну функции при
 :
:





Разложим функцию в ряд Тейлора.

В
нашем случае мы ограничимся разложением
функции до 2-ого порядком. И чтобы
упростить счет мы положим
 Подставив эти выражения в формулу,
написанную выше, мы получим следующие:
Подставив эти выражения в формулу,
написанную выше, мы получим следующие:

Таким образом, наша функция ущерба ведёт себя так же, как многочлен 2-ой степени.
Найдём
точки, в которых
 :
:

Отсюда получаем:
 или
или

Из
первого сомножителя следует, что

А
из второго сомножителя получаем
следующее:
Оценим второй корень:
 ,
так как
,
так как
 Кроме того видно, что
Кроме того видно, что ,
так как это выражение можно записать в
виде
,
так как это выражение можно записать в
виде .
Следовательно, получаем, что
.
Следовательно, получаем, что .
.
Таким образом, видно, что второй корень не попадает в область определения и его следует исключить.
 Теперь
на основание выше проведенного
исследования построим график данной
функции
Теперь
на основание выше проведенного
исследования построим график данной
функции
 (Рис. 16.).
(Рис. 16.).
Рис.
16. График функции
 .
.
где
 –точка перегиба.
–точка перегиба.
Данный
график полностью соответствует графику,
построенному в программе Mathcad
14.0 при
 (Рис. 17.).
(Рис. 17.).



Рис.
17. График функции ущерба
 в программеMathcad
14.0.
в программеMathcad
14.0.
Теперь
проследим, как влияют параметры
 на график и вследствие этого дадим
оценку тому, при каких значениях
вышеупомянутых параметров ущерб будет
минимальный (параметр
на график и вследствие этого дадим
оценку тому, при каких значениях
вышеупомянутых параметров ущерб будет
минимальный (параметр не учитываем, так как он задает только
среднюю продолжительность жизни системы
и никаким образом не влияет на функцию
ущерба).
не учитываем, так как он задает только
среднюю продолжительность жизни системы
и никаким образом не влияет на функцию
ущерба).

 Все
дальнейшие графики были построены в
программе Mathcad
14.0 при различных параметрах (кроме
одного, во всех графиках
Все
дальнейшие графики были построены в
программе Mathcad
14.0 при различных параметрах (кроме
одного, во всех графиках
 ).
).
Рис.
18. График функции ущерба при
 .
.


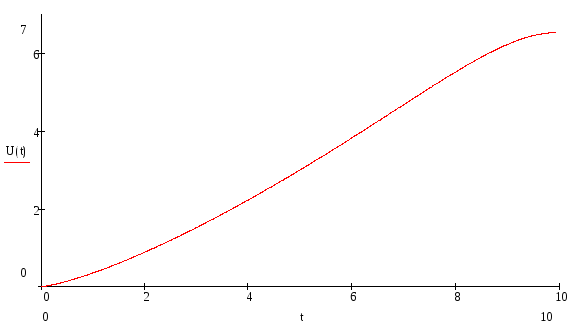
Рис.
19. График функции ущерба при
 .
.



Рис.
20. График функции ущерба при
 .
.



Рис.
21. График функции ущерба при
 .
.


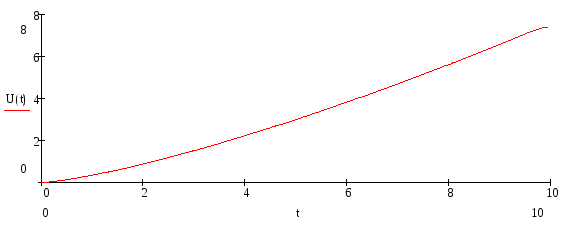
Рис.
22. График функции ущерба при
 .
.
Из
выше построенных графиков можно сделать
вывод, что площади обоих фигурами
разделенными функцией приблизительно
одинаковы и, варьируя параметрами
 мы, не сильно минимизируем ущерб. Таким
образом, можно только добавить, что
если
мы, не сильно минимизируем ущерб. Таким
образом, можно только добавить, что
если ,
то функция ущерба ведёт себя, как функция
,
то функция ущерба ведёт себя, как функция .
Если же
.
Если же или
или ,
то график становится более плавным, но
опять же ущерб при этом не намного
становиться меньше.
,
то график становится более плавным, но
опять же ущерб при этом не намного
становиться меньше.
Так же хочется отметить, что данная функция ущерба показывает, что КПД данного компонента РИС приблизительно равен 0,5.
Если
построить графики функции полезности
 соответствующие выше приведенным
графика функции ущерба
соответствующие выше приведенным
графика функции ущерба при тех же самых параметрах, то мы получим
следующее:
при тех же самых параметрах, то мы получим
следующее:
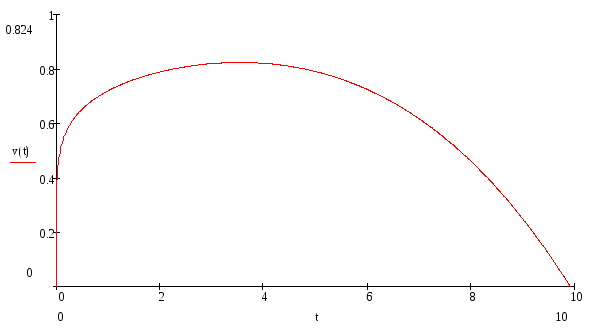
Рис.
22. График функции полезности при
 .
.
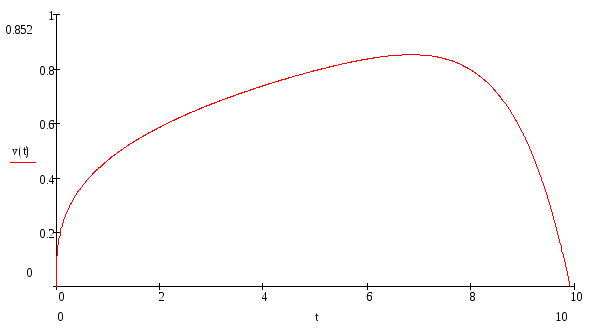
Рис.
23. График функции полезности при
 .
.
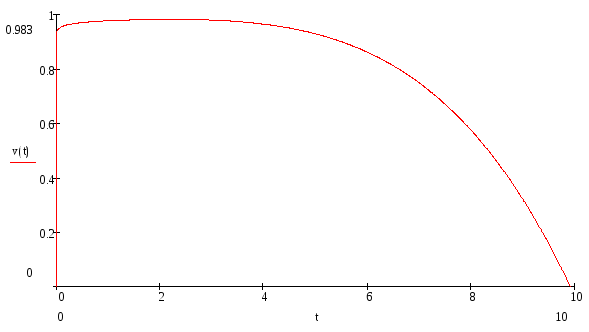
Рис.
24. График функции полезности при
 .
.
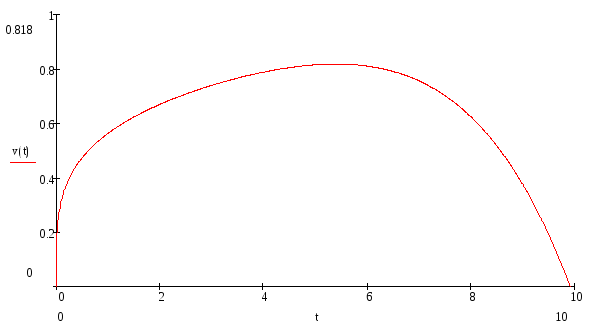
Рис.
25. График функции полезности при
 .
.
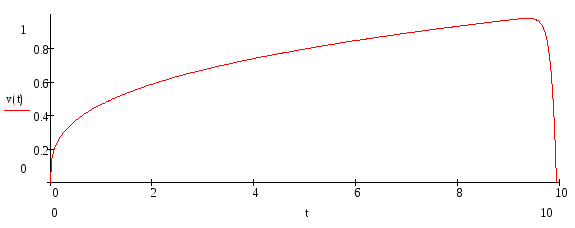
Рис.
26. График функции полезности при
 .
.
Таким
образом, из этих графиков видно, что,
варьируя параметрами
 ,
мы можем уменьшить время восхода и время
заката системы. То есть мы можем заставить
сразу работать систему на полную мощность
и уменьшить время её выхода из строя.
Вывод: из приведенных выше заключений
можно сказать, что, варьируя параметры
,
мы можем уменьшить время восхода и время
заката системы. То есть мы можем заставить
сразу работать систему на полную мощность
и уменьшить время её выхода из строя.
Вывод: из приведенных выше заключений
можно сказать, что, варьируя параметры ,
мы очень сильно можем изменить вид
функции
,
мы очень сильно можем изменить вид
функции
полезности, но при этом мы никак не может повлиять на величину ущерба.