

автоматизация / Пособе промышленные роботы / Глава 3
.pdfГлава 3 ПРОМЫШЛЕННЫЕ РОБОТЫ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ,
ТРАНСПОРТНО-СКЛАДСКИХ РАБОТ, СБОРКИ И ВСПОМОГАТЕЛЬНЫХ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ
Одной из основных задач, стоящих перед современным технологом, является повышение производительности труда. Причём требуемые размеры такого повышения составляют несколько сотен процентов. В настоящее время ясно, что существенного повышения производительности труда нельзя достичь за счёт использования единичных роботов на отдельных технологических операциях. Решение поставленной задачи достигается при комплексном подходе к автоматизации, когда роботизированными должны стать погрузочно-разгрузочные вспомогательные и сборочные операции, составляющие значительную часть от затратам труда, стоимости и объёма работ.
3.1. Промышленные роботы в автоматизированных транспортноскладских системах
Автоматизированная транспортно-складская система (АТСС) является базовым блоком при организации любого автоматизированного производства. Основная функция автоматизированной транспортно-складской системы (АТСС) – осуществление грузопотоков с помощью адресно-накопительной системы со свободным ритмом, обеспечивающей независимую совмещенную по времени работу на всех местах производственного участка.
Промышленные роботы в АТСС широко применяют прежде всего для транспортирования грузов, а так же для автоматизации погрузочно-разгрузочных операций, свяхывающих транспортные потоки.
В составе АТССвходят следующие промышленные роботы:
-крановые роботы-штабелеры;
-монорельсовые роботы-трансманипуляторы;
-мостовые роботы-трансманипуляторы.
Крановые роботы-штабелеры грузоподъёмностью 0,05…1,0 т, применяются для транспортирования грузовых единиц между устройствами приёма-выдачи и ячейками для хранения; для загрузки и выгрузки приемных устройств технологического оборудования, транспортных механизмов, для распределения грузовых единиц между основным технологическим оборудованием.
В таких роботах достигается средняя и тяжелая грузоподъемности (до 200 кг и до 1000 кг) при больших (порядка 1000 в секунду) скоростях перемещения. Увеличение грузоподъёмности промышленного робота приводит к изменениям в его конструкции: манипулятор становится параллелограммным, уменьшается ра-

бочая зона и количество осей подвижности манипулятора, снижается количество осей подвижности до четырёх. Фирмы KUKA, ABB, Motman, FANUC, Kawasaki
выпускают свои крановые роботы-штабелеры, которые могут быть встроены в технологический процесс или работать автономно.
Примером кранового робота-штабелера может служить промышленный роботы M410iB/450 (FANUC Robotics) (рис. 3.1). Увеличенная высота рабочей зоны робота расширяет его технологические возможности, например, позволяет ему производить разгрузку машин или конвейеров, снимать предметы с высоты несколько метров и ставить их на пол цеха.
Рис. 3.1. Промышленный робот M-410iB/450 (изометрия и рабочая зона)
|
|
|
|
|
|
|
|
Таблица 3.1 |
|
Технические характеристики |
роботов-штабелеров серии M-410iA и М-410iB |
||||||||
(Fanuc Robotics) |
|
|
|
|
|
|
|
||
|
|
|
M-410i |
M-410i |
M-410i |
M-410iB |
M-410iB |
M-410iB |
|
|
|
|
AHS |
AHW |
AWW |
/160 |
/300 |
|
/450 |
Грузоподъёмность, кг |
100 |
250 |
400 |
160 |
300 |
|
450 |
||
Количество осей, шт. |
4 |
4 |
4 |
4 |
4 |
|
4 |
||
Точность |
позициони- |
±0,5 |
±0,5 |
±0,5 |
±0,5 |
±0,5 |
|
±0,5 |
|
рования, мм |
|
|
|
|
|
|
|
|
|
Макс. вылет, мм |
|
3139 |
3139 |
3130 |
3143 |
3143 |
|
3130 |
|
Масса манипулятора + |
1570 |
1570 |
2430 |
1940 |
1940 |
|
2430 |
||
масса |
контроллера |
|
|
|
|
|
|
|
|
(120 кг), кг |
|
|
|
|
|
|
|
|
|
Скорость перемещения |
|
|
|
|
|
|
|
||
по осям, 0/сек: |
|
130 |
85 |
70 |
130 |
85 |
|
70 |
|
- |
|
А1 |
|
||||||
- |
|
А2 |
120 |
90 |
70 |
130 |
90 |
|
70 |
- |
|
А3 |
135 |
100 |
70 |
135 |
100 |
|
70 |
- |
|
А4 |
300 |
190 |
180 |
300 |
190 |
|
180 |
Максимальная |
ско- |
|
|
|
|
|
|
|
|
рость линейного пере- |
2,5 |
2,5 |
2,5 |
2,5 |
2,5 |
|
2,5 |
||
мещения, м/сек |
|
|
|
|
|
|
|
|
|
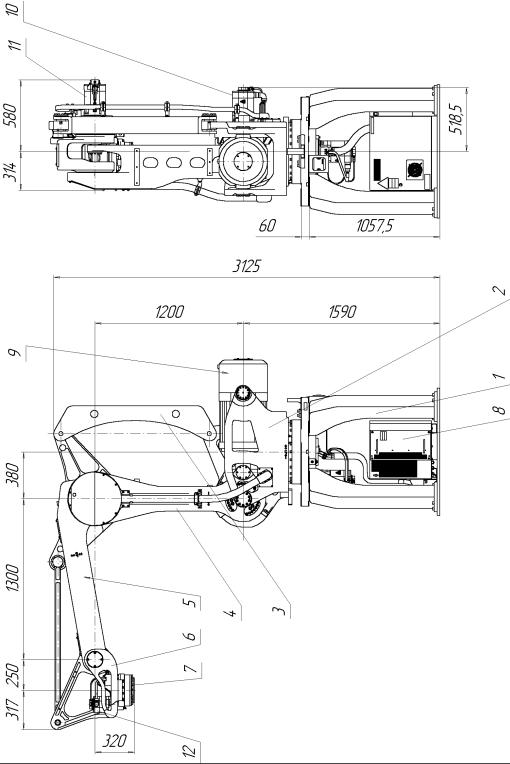
Робот М410iB/450 состоит из (рис. 3.2) базисного основания (поз. 1), на котором установлена поворотная колонна (поз. 2), в которой качается шарнирный параллелограмм со сторонами из приводного рычага (поз. 3) и приводной стойки (поз. 4). Кисть (поз. 6) с фланцем для крепления рабочего инструмента крепится на руке (поз. 5). Контроллер робота (поз. 8) установлен в базисном основании. Движение манипулятора производятся за счёт сервоприводов оси А1 (поз. 9), сервопривода оси А2 (поз. 10), сервопривода оси А3 (поз. 11) и сервопривода оси А4 (поз. 12).
Рис. 3.2. Состав робота M410iB/450 (FANUC Robotics)
Фирма KUKA помимо крановой конструкции четырёхосных манипулято- ров-штабелеров (рис. 3.3-а и 3.3-б) предлагает пятиосную конструкцию. При этом используется стандартное построение, принятое для антропоморфного манипулятора коромыслового типа, состоящий (рис. 3.3-в) из кисти 1, руки 2, коромысла 3, механизма вывешивания 4, карусели 5 и базисного основания 6. Такая конструкция позволяет осуществлять манипулятору перемещения по пяти осям (рис. 3.3-г), вращение основания руки относительно руки по стандартно принятой для антропоморфных манипуляторов оси А4 отсутствует, таким образом ось А6 всегда оказывается параллельна оси А1. Стопорение осей А4 и А5 шестиосного манипулятора превращает его в четырёхосный и позволяет дополнительно увеличить грузоподъёмность, например манипулятор KR 500 грузоподъёмностью 500 кг может поднять до 570 кг.
а) б)
б)
в) г)
г)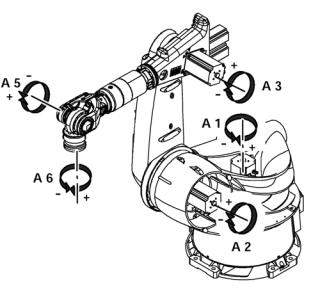
Рис. 3.3. Устройство манипуляторов-штабелеров KUKA
Таблица 3.2 Технические характеристики роботов-штабелеров KUKA
|
|
|
|
KR 180 PA |
KR 100 PA/1 |
KR 160 PA/1 |
KR 500 570 |
|
|
|
|
|
|
|
PA/1 |
Грузоподъёмность, кг |
|
180 |
100 |
160 |
570 |
||
Дополнительная |
загрузка |
на |
50 |
50 |
30 |
50 |
|
руку, кг |
|
|
|
|
|
|
|
Дополнительная |
загрузка |
на |
250 |
- |
- |
400 |
|
карусель, кг |
|
|
|
|
|
|
|
Количество осей, шт. |
|
4 |
5 |
5 |
4 |
||
Точность |
позиционирования, |
±0,35 |
±0,4 |
±0,4 |
±0,15 |
||
мм |
|
|
|
|
|
|
|
Рабочее пространство, м3 |
|
72,7 |
100 |
100 |
68,0 |
||
Масса манипулятора, кг |
|
1240 |
1580 |
1580 |
2350 |
||
Скорость |
перемещения |
по |
|
|
|
|
|
осям, 0/сек: |
|
|
105 |
110 |
90 |
69 |
|
- |
|
А1 |
|
||||
- |
|
А2 |
|
105 |
110 |
90 |
69 |
- |
|
А3 |
|
95 |
100 |
80 |
69 |
- |
|
A5 |
|
- |
166 |
140 |
- |
- |
|
А6 |
|
300 |
200 |
180 |
120 |
Монорельсовые роботы-трансманипуляторы применяются для выполнения транспортно-складских работ как в комплекте со стеллажным складом, так и при обслуживании специально выделенной складской площадки. Роботтрансманипулятор представляет собой сварную конструкцию с установленными на ней рельсовыми путями, по которым транспортная тележка робота осуществляет глобальные перемещения. Такие роботы могут иметь различное число осей подвижности в зависимости от комплектации.
Мостовые роботы-трансманипуляторы позволяют обслуживать площадь цеха в заданной сетке координат адресов. При оснащении развитой системой управления позволяют создавать транспортные системы участков цеха, не зависящие от размещения обслуживаемого оборудования.
У монорельсовых роботов-трансманипуляторов глобальные перемещения могут осуществляться по одной оси OY (рис. 3.4-а), при этом ось OY – координатная, ось OZ –транспортирующая. Более сложную схему имеет мостовой роботтрансманипулятор с двумя координатными осями (рис. 3.4-б), при этом оси OX и OY – координатные, ось OZ – транспортирующая. В зависимости от конструкции кисти, крепящейся на руке такого робота, он может выполнять ориентирующие движения различной сложности. Обычно роботу-трансманипуляторы не требуются оси вращения на кисти (рис. 3.4, а, б), такой робот не имеет осей ориентирования, инструмент может совершать только поступательные перемещения. Такие роботы предназначены для выполнения простых операций, например, перенести груз с одного места на другое, не меняя его ориентации в пространстве. В зависимости от требований производства, конструкция кисти руки робота может быть усложнена (рис. 3.4, в) при этом робот получает три ориентирующие оси.
а)  б)
б)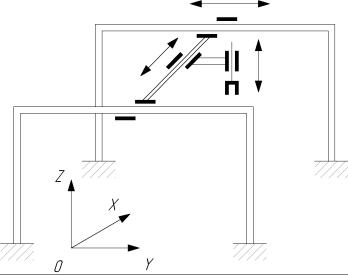
в)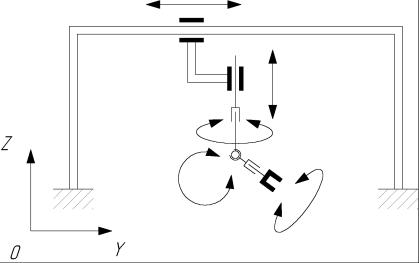 Рис. 3.4. Примеры кинематических схем портальных роботов
Рис. 3.4. Примеры кинематических схем портальных роботов
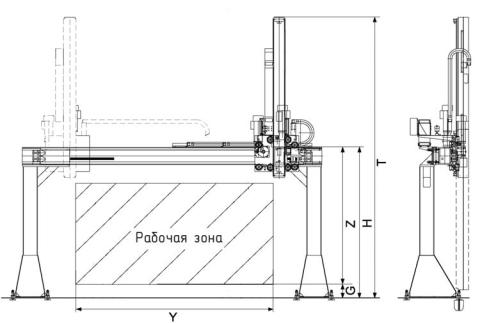
Рис. 3.5. Монорельсовый робот-трансманипулятор IRB 8400/ZP (ABB)
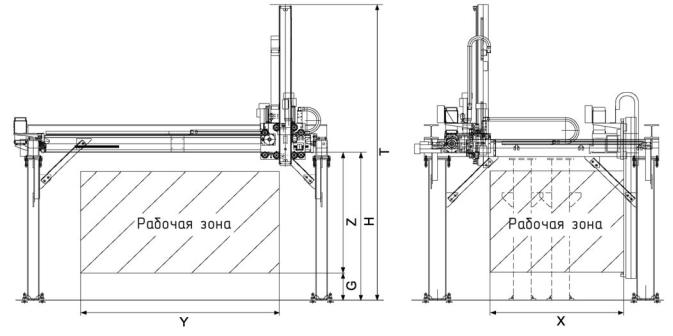
Фирма ABB выпускает роботы-трансманипуляторы IRB 8400/ZP (монорельсовый) (рис. 3.5) и IRB 8400/FP (мостовой) (рис. 3.6), которые имеют технические характеристики, представленные в таблице 3.3. На монорельсовом роботе IRB 8400/ZP возможна установка двойной руки, что расширяет возможности робота.
Таблица 3.3 Технические характеристики портальных роботов-трансманипуляторов ABB
Линейный |
пор- |
ZP-2 |
ZP-3 |
ZP-4 |
ZP-5 |
ZP-6 |
ZP-6HD |
ZP-7 |
ZP-7HD |
|
тальный |
робот |
|
|
|
|
|
|
|
|
|
IRB 8400/ |
|
|
|
|
|
|
|
|
|
|
Пространствен- |
- |
FP-3 |
FP-4 |
FP-5 |
FP-6 |
FP-6HD |
FP-7 |
FP-7HD |
||
ный |
порталь- |
|
|
|
|
|
|
|
|
|
ный робот IRB |
|
|
|
|
|
|
|
|
||
8400/ |
|
|
|
|
|
|
|
|
|
|
Переносимый |
25 |
60 |
150 |
300 |
600 |
1000 |
1600 |
2500 |
||
груз, мм |
|
|
|
|
|
|
|
|
|
|
Точность |
пози- |
±0,2 |
±0,2 |
±0,2 |
±0,2 |
±0,4 |
±0,4 |
±0,4 |
±0,4 |
|
ционирования, |
|
|
|
|
|
|
|
|
||
мм |
|
|
|
|
|
|
|
|
|
|
Макс. |
скорость, |
|
|
|
|
|
|
|
|
|
м/мин: |
|
|
- |
100 |
90 |
100 |
75 |
75 |
40 |
40 |
- ось ОХ |
|
|||||||||
- ось OY |
|
150 |
150 |
150 |
150 |
75 |
75 |
60 |
60 |
|
- ось OZ |
|
150 |
75 |
90 |
75 |
60 |
40 |
30 |
26 |
|
Рабочее |
про- |
|
|
|
|
|
|
|
|
|
странство, м: |
- |
6 |
8 |
8 |
10 |
10 |
10 |
10 |
||
- X |
|
|
||||||||
- Y |
|
|
30 |
50 |
50 |
50 |
50 |
50 |
50 |
50 |
- Z |
|
|
1,0 |
1,2 |
1,6 |
2,0 |
2,8 |
2,8 |
2,8 |
2,8 |
Рис. 3.6. Мостовой робот-трансманипулятор IRB 8400/FP (ABB)
3.2. Промышленные роботы для вспомогательных технологических операций
Разделение промышленных роботов на вспомогательные и технологические, принятое в 80-х годах ХХ века, в настоящее время не отражает полной картины развития роботов. Современный роботопроизводитель выпускает на мировой рынок роботы, которые с успехом могут выполнять и вспомогательные (перемещение и сортировку объектов, загрузка и разгрузка прессов, станков, другого промышленного оборудования и т.д.), и технологические (сварка, резка, окраска, оклеивание, полирование, сборка и др.).
Для манипулирования предметами в пределах локальных перемещений при обслуживании технологического оборудования применяют роботы различной грузоподъёмности. Характерными манипуляторами являются серия S900iB (рис. 3.7-а, табл. 3.4), и манипуляторы серии R2000iA (таб. 3.5) (FANUC robotics), вы-
полняющие функции перемещения объектов, погрузочных работ, перемещение и перестановка объектов, сортировка.
Манипулятор серии R-2000iА состоит из стандартных компонентов (рис. 3.7-б): базисное основание 1, карусель 2, коромысло 3, основание руки 4, кисть 5, привода соответствующих осей МА1…МА6. Серия R-2000iА включает в себя несколько типов модульной компоновки манипулятора в зависимости от требуемых геометрических характеристик рабочей зоны. Манипуляторы /165F, /200F, /210F (рис. 3.8) предназначены для крепления на полу и обеспечения стандартной рабочей зоны. Манипулятор /200L тоже устанавливается на полу, но имеет удлинённую руку, что значительно увеличивает его максимальный вылет (табл. 3.5). Манипулятор /165CF имеет в два раза укороченную руку, что обеспечивает его компактность и применение в стеснённых условиях. Манипуляторы /165R и /200R предназначены для установки на возвышенности и обслуживания оборудования, находящегося ниже уровня основания манипулятора.
Таблица 3.4 Технические характеристики роботов серии S-900 (FANUC robotics)
Показатель |
S-900iB/200 |
S-900iB/220L |
S-900iB/400 |
Количество осей, шт. |
6 |
6 |
6 |
Грузоподъёмность кисти, кг |
200 |
220 |
400 |
Максимальный вылет, мм |
2488 |
3033 |
2488 |
Точность позиционирования, мм |
±0,5 |
±0,5 |
±0,5 |
Масса, кг |
1970 |
2080 |
2045 |
Скорость перемещения по осям: |
120 |
95 |
96 |
- А1 |
|||
- А2 |
120 |
95 |
96 |
- А3 |
125 |
95 |
96 |
- А4 |
115 |
110 |
100 |
- А5 |
115 |
110 |
100 |
- А6 |
200 |
165 |
160 |
Таблица 3.5 Технические характеристики роботов серии R-2000iА (FANUC robotics)
Показатель |
|
/165F |
/200F |
/125L |
/165R |
/200R |
/165CF |
/210F |
Количество |
осей, |
6 |
6 |
6 |
6 |
6 |
6 |
6 |
шт. |
|
|
|
|
|
|
|
|
Грузоподъём- |
165 |
200 |
125 |
165 |
200 |
165 |
210 |
|
ность кисти, кг |
|
|
|
|
|
|
|
|
Максимальный |
2650 |
2483 |
3001 |
3095 |
2928 |
1429 |
2650 |
|
вылет, мм |
|
|
|
|
|
|
|
|
Точность |
пози- |
±0,3 |
±0,3 |
±0,3 |
±0,3 |
±0,3 |
±0,3 |
±0,3 |
ционирования, |
|
|
|
|
|
|
|
|
мм |
|
|
|
|
|
|
|
|
Скорость |
А1 |
105 |
90 |
105 |
105 |
90 |
110 |
95 |
переме- |
А2 |
105 |
85 |
105 |
90 |
85 |
90 |
90 |
щения по |
А3 |
105 |
90 |
105 |
105 |
90 |
100 |
95 |
осям, °/сек |
А4 |
130 |
110 |
170 |
130 |
110 |
130 |
120 |
|
А5 |
130 |
110 |
170 |
130 |
110 |
130 |
120 |
|
А6 |
210 |
155 |
260 |
210 |
155 |
210 |
190 |
Масса, кг |
|
1210 |
1240 |
1230 |
1540 |
1570 |
1050 |
1270 |
а)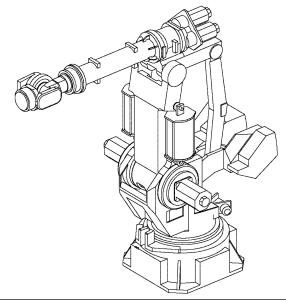 б)
б)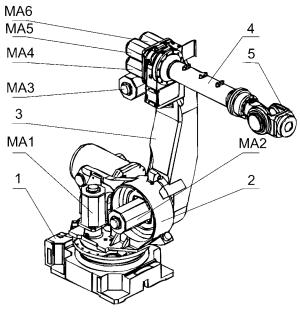
Рис. 3.7. Манипуляторы S-900 (а) и R-2000i (б)
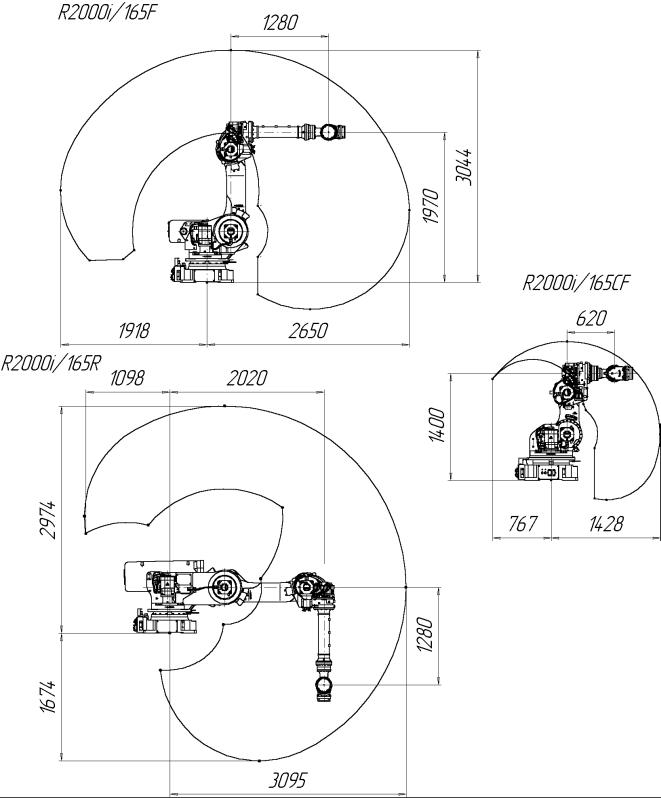
Рис. 3.8. Примеры выполнения манипулятора серии R2000i/165