

автоматизация / Пособе промышленные роботы / Глава 1
.pdf3. Упрощается согласование схемы ПР с осями оборудования, расставленными не в точном соответствии со схемой идеальной расстановки. Для ПР, работающего в цилиндрической или сферической системе координат, желательно, чтобы при расстановке оборудования по окружности оси, по которым рука ПР вводится в рабочие зоны, были радиальными. В действительности их направления могут отличаться от радиальных (рис. 1.8), при этом введение дополнительной степени подвижности позволяет исправить положение.
Рис. 1.8. Использование шестиосного робота для универсального подхода к станкам
4.Делается возможным подвод рабочего инструмента к предмету с различных сторон (например, при нанесении покрытий и окраске). Большая гибкость при этом достигается введением вращательных пар.
5.Увеличивается точность позиционирования, т.к. конечные движения (оси А5 и А6) осуществляются при малых перемещающихся массах на конце руки манипулятора.
6.Повышается отказоустойчивочть робота - для того, чтобы робот продолжал работу при отказе одного звена, увеличивают число звеньев и степеней подвижности манипулятора.
Исходя из этого, минимальное количество осей подвижности современного промышленного робота – шесть. Современные контроллеры промышленных роботов могут предусматривать управление до восьми осей подвижности.
1.5. Классификация роботов
Классификация роботов необходима для разработки типажа и производится по следующим признакам:
1) По характеру выполнения технологических операций роботы делятся на
3 группы:
-Технологические (производственные) роботы (ТПР) выполняют основные технологические операции. Они непосредственно участвуют в техпроцессе в качестве оборудования (гибка, сварка, окраска, сборка и т.д.);
-Вспомогательные (подъемно-транспортные) (ВПР) выполняют функции переноса объекта в вертикальной и горизонтальной плоскостях. Их применяют для обслуживания основного технологического оборудования;
-Универсальные роботы (УПР) – выполняющие разнообразные технологические операции – основные и вспомогательные.
2) По степени специализации подразделяются:
- специальные – только для выполнения одной технологической операции или обслуживания конкретного технологического оборудования;
- специализированные ПР – предназначены для выполнения технологических операций одного вида (сварки, окраски, сборки, гибки, штабелирования и т.д.);
- многоцелевые – для выполнения различных основных и вспомогательных операций, такие роботы относятся к числу универсальных.
3) По типам производства – серийное и массовое.
4)Область применения по виду производства:
-в заготовительных цехах: литейных, кузнечнопрессовых и т.д.
-в основных цехах: механических, сборочных, термических, гальванических и др.;
-во вспомогательных цехах: инструментальных, ремонтных и др.
5)По грузоподъемности:
-сверхлегкие – до 1 кг.;
-легкие – до 10 кг.;
-средние – до 200 кг.;
-тяжелые – до 1000 кг.;
-сверх тяжелые – свыше – 1000 кг.
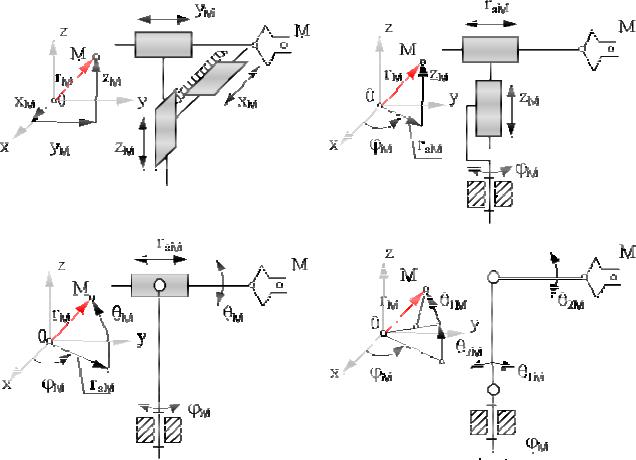
5)По системе координат основных перемещений манипулятора:
-прямоугольная (рис. 1.9, а);
-цилиндрическая (рис. 1.9, б);
-сферическая (рис. 1.9, в);
-ангулярная (рис. 1.9, г).
6) По характеру программирования:
-цикловое (задается только последовательность движений, а положения подвижных частей задаются упорами или путевыми выключателями);
-позиционное (программируется последовательность выполнения и конечные точки движений);
-контурное (программируется вся траектория движения и скорости перемещения по осям).
а) |
|
|
|
|
|
|
|
б) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) г) 




 Рис. 1.9. Примеры систем координат перемещений манипулятора промышленного
Рис. 1.9. Примеры систем координат перемещений манипулятора промышленного
робота: а – прямоугольная; б – цилиндрическая; в – сферическая; г – ангулярная
7) Мобильность:
-стационарные;
-подвижные.
8) Конструктивное исполнение:
-встроенные;
-напольные;
-подвесные.
9) Тип силового привода:
- |
гидравлический; |
- |
пневматический; |
- |
электрический; |
- |
комбинированный привод. |
10) |
По числу степеней подвижности манипулятора (4, 5 и 6 степеней). |
|
11) |
По виду программы: |
|
- |
с жесткой программой; |
|
- |
перепрограммируемые; |
|
- |
адаптивные; |
|
- с элементами искусственного интеллекта.
Контрольные вопросы к главе 1
1.Как изменяется соотношение количество/цена промышленных роботов на мировом рынке, и какое развитие можно предположить на ближайшее будущее?
2.Какие основные закономерности применения роботов в современной промышленности можно проследить за последние годы?
3.Какие современные мировые фирмы-роботопроизводители Вы знаете?
4.Какие показатели робота входят в число общих и технических характеристик?
5.Как рассчитывается число степеней подвижности робота? Чему оно равно для современного антропоморфного манипулятора, манипулятора СКАРА?
6.Нарисуйте кинематическую схему и поясните состав современного антропоморфного коромыслового манипулятора с шестью осями подвижности.
7.Нарисуйте кинематическую схему и поясните состав современного параллелограммного манипулятора с шестью осями подвижности.
8.Чем отличаются технические характеристики антропоморфных параллелограммного и коромыслового промышленных роботов?
9.Почему на современном машиностроительном производстве обычно не ис-
пользуют роботы менее чем с шестью осями подвижности?
10.Какие существуют системы координат перемещений промышленного робота в соответствии с принятой классификацией?