

Лабораторная работа №15. Гироскоп
Цель работы: изучение динамики вращательного движения твердого тела на примере гироскопа, изучение явления прецессии гироскопа, измерение угловой скорости прецессии и определение момента инерции гироскопа.
Оборудование: гироскоп FPM-10 представлен на рисунке 10. На основании, оснащенном ножками с регулируемой высотой, позволяющими произвести выравнивание прибора, закреплена колонка (2). На колонке закреплен кронштейн (3), на котором установлен первый фотоэлектрический датчик (4) и внешняя втулка вращательного соединения (5). Вращательный соединитель позволяет гироскопу обращаться вокруг вертикальной оси и обеспечивает питание электрическим током второго фотоэлектрического датчика (6) и электрического двигателя (7) посредством подвижных разъемов.
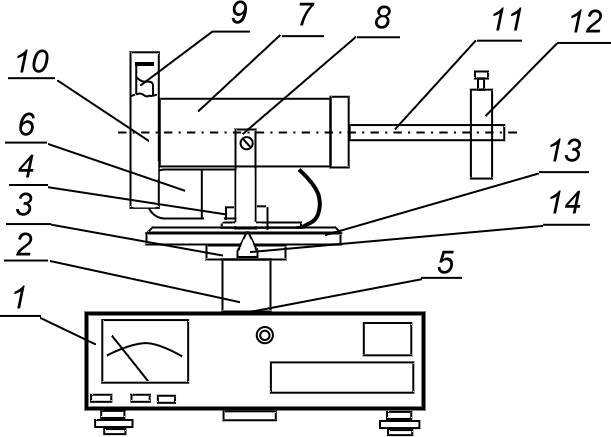
Рис. 10. Гироскоп FPM-10, входящий в комплекс оборудования для лабораторий механики.
Электрический двигатель вмонтирован в кронштейн (8) таким образом, что позволяет неограниченные обороты в вертикальной плоскости. На вале двигателя закреплен диск (9), защищенный экраном (10). Рычаг (11) закрепленный на корпусе двигателя имеет нанесенную метрическую шкалу. На рычаге закреплен груз (12). Путем перемещения груза по рычагу, можно уравновесить гироскоп, перемещая центр масс системы.
Оборот гироскопа вокруг вертикальной оси можно считать с диска (13) с нанесенной угловой шкалой, при помощи указателя (14). Диск (13) имеет на окружности отверстия через каждые 50, которые подсчитываются фотоэлектрическим датчиком №1. В блок управления и измерения (15) передается информация об угле оборота гироскопа.
Диск (9) имеет на окружности нарезания, которые подсчитываются фотоэлектрическим датчиком №2 для передачи в блок управления информации о скорости оборотов электрического двигателя.
Приближенная
теория гироскопа: гироскопы
используются в науке и технике в качестве
приборов искусственного горизонта, для
автоматического управления движением
мин и торпед, для гироскопических
компасов. О различных областях применении
гироскопов вы прочитаете в работе [1,
§51]. Гироскопом называется быстровращающееся
твердое тело,
ось вращения которого может изменять
свое направление в пространстве.
Схематически такое тело показано на
рисунке 11. Наиболее актуально применение
симметричных гироскопов, то есть таких,
чтобы ось вращения гироскопа была его
осью симметрии. Подвижность оси гироскопа
обеспечивается
кардановым подвесом или каким-либо
другим аналогичным
устройством. При этом вращение оси
гироскопа происходит
таким образом, что некоторая точка этой
оси (на рисунке 11 это точка O
- центр
масс гироскопа) остается неподвижной.
Угловую скорость вращения гироскопа
вокруг своей оси
будем обозначать через
![]() .
.![]() - момент импульса гироскопа.
- момент импульса гироскопа.
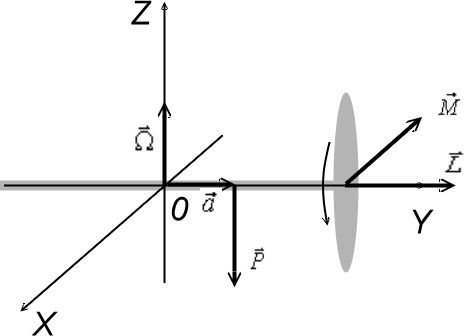
Рис. 11. Симметричное вращающееся тело в декартовой прямоугольной системе координат.
Если
к гироскопу, перпендикулярно оси его
вращения приложить силу
![]() ,
с плечом
,
с плечом
![]() ,
создающуюмомент
,
создающуюмомент![]() ,
то момент импульса
,
то момент импульса
![]() относительно
точки О
будет
изменяться в соответствии с уравнением
динамики вращательного движения:
относительно
точки О
будет
изменяться в соответствии с уравнением
динамики вращательного движения:
![]() . (1)
. (1)
Момент импульса гироскопа связан с угловой скоростью его вращения:
![]() , (2)
, (2)
где
![]() – момент инерции гироскопа относительно
его оси,
– момент инерции гироскопа относительно
его оси,![]() -
момент инерции гироскопа относительно
оси, перпендикулярной оси вращения (в
случае, показанном на рисунке 11 это осьOZ).
Если угловая
скорость вращения гироскопа очень
велика, то
при относительно медленном изменении
ориентации оси гироскопа,
то есть выполняется неравенство
-
момент инерции гироскопа относительно
оси, перпендикулярной оси вращения (в
случае, показанном на рисунке 11 это осьOZ).
Если угловая
скорость вращения гироскопа очень
велика, то
при относительно медленном изменении
ориентации оси гироскопа,
то есть выполняется неравенство
![]() ,
тогда его момент импульса будет
практически направлен по осигироскопа
и можно будет применить приближенную
формулу:
,
тогда его момент импульса будет
практически направлен по осигироскопа
и можно будет применить приближенную
формулу:
![]() . (3)
. (3)
В
нашем случае гироскоп первоначально
был раскручен вокруг горизонтальной
оси (рис. 11), а сила тяжести направлена
вертикально вниз, поэтому, согласно
правилу векторного произведения, момент
внешней силы
![]() будет лежать в горизонтальной плоскости
перпендикулярно оси
гироскопа, то есть перпендикулярно
будет лежать в горизонтальной плоскости
перпендикулярно оси
гироскопа, то есть перпендикулярно
![]() и моменту
импульса
и моменту
импульса
![]() .
Приращение
.
Приращение![]() момента импульса должно быть сонаправлено
моменту
момента импульса должно быть сонаправлено
моменту
![]() ,
то есть, перпендикулярно моменту
импульса
,
то есть, перпендикулярно моменту
импульса
![]() ,
поэтому маховичок, показанный на рисунке
11, будет совершать вращение вокруг осиOZ
с некоторой угловой частотой
,
поэтому маховичок, показанный на рисунке
11, будет совершать вращение вокруг осиOZ
с некоторой угловой частотой
![]() .
Абсолютное значение вектора момента
импульса будет оставаться постоянным,
но пока действует внешняя сила
.
Абсолютное значение вектора момента
импульса будет оставаться постоянным,
но пока действует внешняя сила![]() ,
направление его непрерывно изменяется.
Изменение направления вектора
,
направление его непрерывно изменяется.
Изменение направления вектора![]() подчиняется уравнению:
подчиняется уравнению:
![]() . (4)
. (4)
За
время
![]() ось гироскопа поворачивается на уголΩdt,
тогда
изменение
момента импульса за этот же промежуток
времени будет равно
ось гироскопа поворачивается на уголΩdt,
тогда
изменение
момента импульса за этот же промежуток
времени будет равно
![]() . (2)
. (2)
Если
при изменении направления оси на угол
Ωdt
внешняя
сила останется неизменной, но вектор
![]() повернется на такой же угол, тогда и
момент внешней силы
повернется на такой же угол, тогда и
момент внешней силы
![]() совершит поворот на уголΩdt,
не изменившись по величине,
а значит, в новом положении гироскопа
момент силы опять будет перпендикулярен
моменту инерции. На
следующем интервале времени dt
гироскоп
совершит поворот на новый угол Ωdt.
Таким
образом, под действием постоянного
момента сил
совершит поворот на уголΩdt,
не изменившись по величине,
а значит, в новом положении гироскопа
момент силы опять будет перпендикулярен
моменту инерции. На
следующем интервале времени dt
гироскоп
совершит поворот на новый угол Ωdt.
Таким
образом, под действием постоянного
момента сил
![]() возникнет вращение оси гироскопа с
постоянной
угловой скоростью Ω,
которое
называется
прецессией.
При этом из уравнений (1) и (4) следует,
что
возникнет вращение оси гироскопа с
постоянной
угловой скоростью Ω,
которое
называется
прецессией.
При этом из уравнений (1) и (4) следует,
что
![]() . (5)
. (5)
Учитывая формулу (3), получим для угловой скорости прецессии:
![]() . 6)
. 6)
Момент внешней силы создается с помощью постоянного груза массой m, который можно перемещать на расстояние a относительно центра масс гироскопа, поэтому окончательная формула для прецессии запишется в виде:
![]() . (7)
. (7)
Из
этой формулы можно рассчитать момент
инерции гироскопа
![]() относительно оси симметрии.
относительно оси симметрии.
Отметим еще раз, что направление угловой скорости прецессии перпендикулярно направлению момента внешних сил, как только внешние силы перестают действовать, и момент их станет равен нулю, прецессионное движение гироскопа прекращается.
Ход работы:
ВНИМАНИЕ. Скорость вращения ротора электродвигателя может достигать I0000 об/мин (I70 об/с), однако при выполнении работы его не следует разгонять более 4000 об/мин, так как при этой частоте гироскоп входит в первый механический резонанс, сопровождаемый сильными вибрациями.
Измерение времени и угла прецессии гироскопа
1) При помощи перемещаемого груза (m=375г) установить рычаг гироскопа перпендикулярно вертикальной оси.
2) Включить питание двигателя.
3) Отрегулировать обороты двигателя на величину около 3000 об/мин.
4) Переместить груз на 2 см влево или вправо.
5)
Нажать кнопку СБРОС. После оборота
гироскопа на угол
![]() нажать «СТОП».
нажать «СТОП».
6)
Вычислить угловую скорость прецессии
![]() после считывания с показателей значения
угла и времени прецессии (уголα
предварительно перевести в радианы).
Измерения пунктов 4-6 записать в таблицу:
после считывания с показателей значения
угла и времени прецессии (уголα
предварительно перевести в радианы).
Измерения пунктов 4-6 записать в таблицу:
|
a, см |
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7) Проделать следующие качественные опыты:
а) поставив груз в положение равновесия, слегка надавить на рычаг вперед и назад (вдоль оси OX, рис. 11), и записать в тетради соответствующее поведение гироскопа, качественно изобразить гироскоп в тетради, показать направление моментов импульса и внешней силы, приращение момента импульса, и в направление оси, относительно которой возникнет вращение;
б) опустить рычаг с грузом вниз до упора и поворачивать гироскоп вокруг оси OZ: в одну сторону вращение окажется совершенно свободным, а в другую – нет. Сделать качественный рисунок в тетради, изображающий моменты импульса и силы.
8. Выключить сначала мотор ручкой «peгулировка скорости», а затем и всю установку кнопкой «СЕТЬ».
Обработка результатов
9)
Построить график. По оси абсцисс отложить
расстояние a
середины груза от точки равновесия
(плечо силы![]() ),
по оси ординат отложить угловую скорость
прецессииΩ.
),
по оси ординат отложить угловую скорость
прецессииΩ.
Измерение момента импульса гироскопа
10)
При известной угловой скорости прецессии
![]() и заданном моменте внешней силы по
формуле
и заданном моменте внешней силы по
формуле
![]() . (8)
. (8)
вычислить момент импульса гироскопа. Расчеты записать в таблицу:
-
a, см
Рассчитать момент инерции гироскопа по тангенсу угла наклона графика прямой, полученной в п. 7.
С помощью уравнения динамики вращательного движения (1) объяснить результаты опытов в пункте 7.
Контрольные вопросы:
Что такое момент инерции относительно оси вращения а) частицы; б) твердого тела?
Что такое момент импульса твердого тела?
Чем отличаются
 и
и ?
?Расскажите о применении гироскопов в технике.
Как по известному направлению прецессии гироскопа определить направление вращения маховика?
Получите формулу для прецессии, в случае, когда ось фигуры гироскопа наклонена к оси, вокруг которой совершается прецессия.
Объясните явление прецессии.
Какие упрощающие предположения были сделаны в теоретической части работы?
В уравнениях теоретической части были сделаны некоторые упрощения. Какой будет связь между
 и
и
 при таких упрощениях?
при таких упрощениях?Что такое нутация? Объясните это явление с помощью точной теории гироскопа.
Литература: [1] - § 50-52; [2] §31-34,[8] глава 8, § 8.2-8.5.