

Uch_posobie_TMM
.pdf80
го положения шатуна 4 , координаты центра тяжести шатуна и перемещения ползуна XE в системе координат XOY.
2.5.5. Определение линейных скоростей и ускорений точек звеньев, а также угловых скоростей и угловых ускорений звеньев
механизма
В данном разделе приводятся алгебраические формулы, которые позволяют упростить дифференцирование таблично заданных функций при решении задачи на ЭВМ.
Как было уже показано, с изменением положения ведущего звена изменяется и конфигурация звеньев механизма и, следовательно, изменяются координаты отдельных точек звеньев, а также угловые положения самих звеньев. В режиме установившегося движения повторяемость кинематических параметров соответствует углу поворота ведущего звена, чаще всего равному 2π, поэтому число положений звена N и шаг h связаны между собой: h = 2π/N.
Возьмем некоторое количество (k = 0, 1, 2,…, N) равностоящих друг от друга на величину h положений ведущего звена механизма:
φ(k) = φ(0) + k · h.
При описании текущих значений координат точек звеньев и их угловых положений величину угла поворота φ(k) будем считать аргументом. Так будет образована дискретная последовательность значений некоторой непрерывной функции [11]. Например, для ординаты YS точки S звена описание YS(k) означает, что функция YS(k) имеет аргумент φ(k). Разности между соседними значениями функции для множества равноотстоящих значений аргумента называют конечными разностями
(k) YS(k 1) YS(k). |
(2.52) |
Для упрощения записи в дальнейшем принадлежность ординаты Y к некоторой точке S опускается. Если разности составляются из самих конечных разностей, то их называют конечными разностями второго порядка
2(k) (k 1) (k) Y (k 2) 2Y (k 1) Y (k). |
(2.53) |
Аналогично можно образовать конечные разности, порядок которых выше второго. Например,
3(k) 2(k 1) 2(k) Y (k 3) |
|
|
|
3Y (k 2) 3Y (k 1) Y (k), |
|
|
|
4(k) 3(k 1) 3(k) Y (k 4) |
|
(2.54) |
|
4Y (k 3) 6Y (k 2) 4Y (k 1) Y |
(k). |
||
|

81
В данном случае конечные разности используются для определения производных функций, заданных таблично. Для функции, дифференцируемой n раз, имеет место следующее соотношение между операторами разностей и дифференцирования:
Dn |
d n |
(ln(1 ) / h)n ( 2 / 2 3 / 3 ...)n / hn . |
|
d n |
|||
|
|
Для практической реализации оператора D согласно принятым выше обозначениям получим для первой производной следующее алгебраическое выражение:
DY (k) ( (k) 2(k) / 2 3(k) / 3 4(k) / 4 ...) / h. |
(2.55) |
Для второй производной имеет место формула |
|
D2Y (k) ( 2(k) 3(k) 11 4(k) /12 ...) / h2 . |
(2.56) |
Производные более высоких порядков могут быть получены из общей формулы, однако в данной работе они не используются. Используя формулы для численного дифференцирования, найдем, например, скорость точки S, координаты которой удовлетворяют описанию (2.42). Согласно конечной разности (2.53) для абсциссы XS имеем
XS(k) XS(k 1) XS(k). Конечные разности второго и более высоких
порядков найдем по формулам, аналогичным (2.54), (2.55). Подставив значения конечных разностей всех порядков в формулу (2.56), найдем проекцию аналога скорости DXS(k) на ось абсцисс X. Проекция аналога скорости на ось ординат DYS(k) находится аналогично. Численное значение аналога скорости в положении ведущего звена φ(k) находим по формуле
DS(k) |
(DXS(k))2 (DYS(k))2 , |
(2.57) |
а значение скорости, согласно (2.35), VS(k) DS(k).
Угловое положение ax(k) вектора VS(k) по отношению к оси абсцисс X определяется через проекции аналогов скорости по следующей формуле:
ax(k) arctg(DYS(k) / DXS(k)). |
(2.58) |
Поскольку главные значения обратной тригонометрической функции arctg лежат в пределах от -π/2 до π/2, то для определения углового положения вектора скорости по отношению к оси абсцисс следует пре-
дусмотреть в программе условный переход ax(k) ax(k), если проекция аналога скорости на ось X отрицательна, то есть DXS(k) 0. В случае, если DXS(k) 0, но DYS(k) 0, то угловому положению вектора скорости следует присвоить значение ax(k) 2 ax(k).

82
Ускорения точек звеньев определяются по зависимостям, аналогичным формуле (2.36). Для аналога ускорений точки S, используя формулу
(2.57), получим D2S(k) (D2 XS(k))2 (D2YS(k))2 . Ускорение для точ-
ки WS(k) 2 D2S(k). Положение вектора ускорения, например, для той же точки S по отношению к оси абсцисс определяется углом
x(k) arctg(D2YS(k) / D2 XS(k)). |
(2.59) |
Условные переходы при определении положения вектора ускорения в программе подчиняются правилам, принятым ранее для определения положений векторов скорости. Годографы скорости и ускорения точки звена помогут пользователю контролировать численные значения. Следует помнить, что вектор ускорения направлен по касательной к годографу скорости.
При определении аналогов угловых скоростей и угловых ускорений необходимо использовать описание угловых положений звеньев. Например, для коромысла BD шарнирного четырехзвенника (см. рис.2.30) получим аналог угловой скорости
d |
(k) |
d |
(k) |
d |
(k), |
(2.60) |
|
d |
d |
d |
|||||
|
|
|
|
если продифференцируем по φ выражение (2.44). Для каждого положения ведущего звена φ(k) производные dd (k), dd (k) определяются из фор-
мулы (2.56). Чтобы получить аналоги угловых ускорений, необходимо воспользоваться формулой (2.57). Угловая скорость коромысла
d (k) |
d |
(k) , |
|
d 2 |
2 |
|
угловое ускорение d (k) |
|
(k) . |
||
d |
d 2 |
Таким образом, при численном дифференцировании определение линейных скоростей и ускорений точек звеньев, а также угловых скоростей и угловых ускорений звеньев сводится к определению их аналогов по формулам (2.56), (2.57).
В качестве примера в табл. 2.4 приведены значения кинематических параметров для механизма показанного на рис. 2.35. Размеры звеньев даны в разделах 2.5.2 и 2.5.4, а координаты точек звеньев в табл. 2.2.
83
Таблица 2.4
Аналоги угловых и линейных скоростей звеньев по положениям ведущего звена
, |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
||||||
град |
|||||||||||||||||||
|
d 2 |
|
0,004 |
0,118 |
0,186 |
0,198 |
0,160 |
0,086 |
-0,003 |
-0,086 |
-0,151 |
-0,196 |
-0,196 |
-0,121 |
0,004 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dS2 |
|
0,100 |
0,081 |
0,057 |
0,050 |
0,067 |
0,088 |
0,098 |
0,091 |
0,070 |
0,050 |
0,067 |
0,097 |
0,100 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
d 3 |
|
-0,167 |
-0,118 |
-0,054 |
0,014 |
0,081 |
0,136 |
0,162 |
0,147 |
0,087 |
-0,006 |
-0,112 |
-0,173 |
-0,167 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dS3 |
|
0,050 |
0,035 |
0,016 |
0,004 |
0,024 |
0,041 |
0,049 |
0,044 |
0,027 |
0,002 |
0,034 |
0,052 |
0,05 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d 4 |
|
0,165 |
0,119 |
0,055 |
-0,014 |
-0,081 |
-0,136 |
-0,166 |
-0,147 |
-0,089 |
0,006 |
0,112 |
0,173 |
0,165 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dS4 |
|
0,034 |
0,027 |
0,014 |
0,003 |
0,019 |
0,030 |
0,033 |
0,031 |
0,024 |
0,002 |
0,028 |
0,036 |
0,034 |
||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
dE |
0,007 |
0,016 |
0,010 |
0 |
-0,012 |
-0,016 |
-0,006 |
0,012 |
0,020 |
0,002 |
-0,020 |
-0,014 |
0,007 |
||||
|
|
|
|
||||||||||||||||
|
|
d |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В табл. 2.4 приведены численные значения аналогов линейных и угловых скоростей в соответствии с обозначениями рис. 2.35. Чтобы получить скорости, необходимо, согласно (2.35) учесть угловую скорость ведущего звена.
2.5.6. Аналитический метод исследования для структурной группы II класса 3-го вида на примере кулисных механизмов
Кулисные механизмы обычно используют в таких технологических процессах, где продолжительность рабочего хода в 1,5...2 раза больше, чем холостого. Чаще всего кулисные механизмы являются составной частью различных станков. Например, для резки арматурной стали используют станки типа СМЖ, которые в основе своей имеют кулисный механизм перемещения подвижного ножа. В момент реза качательное движение кулисы обеспечивает сближение подвижного ножа с неподвижным, закрепленным на станине станка. Во время отхода подвижного ножа от неподвижного зазор между ними увеличивается и в него вставляется очередной стержень. Для изготовления закладных деталей, ис-
84
пользуемых для соединения отдельных элементов из сборного железобетона, применяют листовой и фасонный прокат. Такой прокат режут на универсальных станках типа СМЖ-652. В этих станках кулисные механизмы приводят в движение раму с отрезными ножами и ножами для резки фасонных профилей.
В некоторых технологических процессах кулисные механизмы используют самостоятельно.
а |
|
|
|
|
|
б |
|
|
|
|
|
O |
|
|
Y |
|
|
C |
|||||
|
|
Y |
|
|
|
||||||
|
|
φ |
|
|
|
|
|
|
A |
||
|
|
|
|
|
|
|
|
||||
|
|
A |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
φ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
B |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
B |
k |
|
|
X |
|
|
|
|
|
|
|
|
|
|
N |
||
|
|
X |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
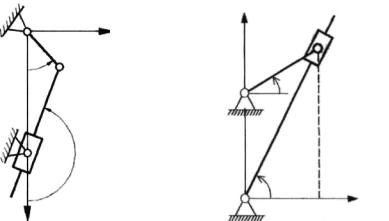
Рис. 2.36. Кулисные механизмы:
а– структурная схема механизма с качающимся кулисным камнем;
б– структурная схема механизма с вращающимся кулисным камнем
Несмотря на разнообразие исполнения элементов в конструкции кулисных механизмов, там обязательно присутствуют кривошип ОА, кулисный камень (ползун) и кулиса. На рис. 2.36, а, б, показаны структурные схемы механизмов. Фиксированными размерами являются длина
кривошипа OA и межосевое расстояние OB . Кулисный камень и кулиса
с внешними вращательными парами А и В образуют структурную группу II класса 3-го вида.
При кинематическом исследовании прежде всего решают задачи связанные с определением положений звеньев механизма в зависимости от изменения обобщенной координаты. В системе координат, выбранной на рис. 2.36, а, для определения углового положения камня насоса имеем
arctg |
sin |
, |
|
cos |
|||
|
|
где OB / OA.
Написание формулы определяющей угловое положение кулисы за-

85
висит от выбора системы координат. В системе координат, как на рис. 2.36, б, положение кулисы K связано с углом поворота кривошипа φ
функцией
K arctg |
sin |
. |
(2.61) |
|
|||
|
cos |
|
|
До сих пор определялись положения звеньев механизма в зависимости от обобщенной координаты φ. Однако задачи кинематического исследования гораздо шире. Для того чтобы удовлетворить запросы практики, необходимо знать линейные скорости и ускорения характерных точек звеньев, а также угловые скорости и ускорения самих звеньев. В
данном случае будем считать угловую скорость кривошипа d / dt
величиной заданной и постоянной.
Движение звеньев в механизме определяется не только кинематическими параметрами ведущего звена. Используя понятие аналога скорости, как это было в п. 2.5.1 для угловой скорости кулисы получим
K |
d K |
|
|
d K |
, |
(2.62) |
|||
dt |
d |
||||||||
|
|
|
|
|
|||||
где K – угловая скорость кулисы, |
|
d K |
|
– аналог угловой скорости ку- |
|||||
|
d |
||||||||
|
|
|
|
|
|
||||
лисы. |
|
|
|
|
|
|
|||
Продифференцировав K ( ) |
из (2.61) |
и подставив результат в |
|||||||
(2.62), получим для угловой скорости кулисы следующее выражение:
|
K |
|
1 sin |
. |
|
|
1 2 sin 2 |
|
Повторно дифференцируя (2.62) с использованием условия ω = const, найдем формулу для определения углового ускорения кулисы:
|
|
|
d 2 |
|
|
2 |
|
|
( 2 1) cos |
2 |
|
|
K |
|
|
|
|
|
|
|
|
|
. |
d 2 |
|
(1 |
2 sin 2 )2 |
||||||||
|
|
|
|
|
|
|
|||||
Зная угловую скорость K |
и угловое ускорение K |
можно по извест- |
|||||||||
ным формулам кинематики найти линейные скорости и ускорения любых точеккулисы. Например линейнаяскорость точки C кулисы VC K BC .
Абсолютноеускорениеточки Сбудет:
WC BC  2K 4K .
2K 4K .
86
Таблица 2.5
Значения угловых и линейных кинематических параметров для кулисного механизма
|
|
|
k |
|
k |
XC |
YC |
Vc |
|
|
|
|
|
|
|
||
град |
рад |
с-1 |
с-2 |
м |
м |
м/с |
||
0 |
1,212 |
1,266 |
22,0 |
0,492 |
1,311 |
1,76 |
||
30 |
1,304 |
2,186 |
10,4 |
0,369 |
1,350 |
3,05 |
||
60 |
1,430 |
2,624 |
2,17 |
0,196 |
1,386 |
3,66 |
||
90 |
1,571 |
2,760 |
–2,98 |
0,000 |
1,400 |
3,86 |
||
120 |
1,711 |
2,633 |
–7,8 |
–0,196 |
1,386 |
3,71 |
||
150 |
1,838 |
1,897 |
6,45 |
–0,369 |
1,350 |
2,66 |
||
180 |
1,930 |
0,548 |
27,6 |
–0,492 |
1,311 |
1,03 |
||
210 |
1,951 |
0,481 |
–117,8 |
0,520 |
1,300 |
2,15 |
||
240 |
1,842 |
–3,229 |
–123,1 |
–0,375 |
1,349 |
5,17 |
||
270 |
1,571 |
–6,766 |
60,0 |
0,000 |
1,400 |
9,60 |
||
300 |
1,300 |
–3,843 |
78,1 |
0,375 |
1,344 |
5,37 |
||
330 |
1,911 |
–0,563 |
43,9 |
0,520 |
1,200 |
0,79 |
||
|
|
|
|
|
|
|
||
360 |
1,212 |
1,266 |
22,0 |
0,492 |
1,311 |
1,76 |
||
|
|
|
|
|
|
|
|
|
Если свободный конец кулисы C является точкой связи со следующей структурной группой, то определение положения точек последующих звеньев осуществляется на базе уже приведенной выше методики в зависимости от вида структурной группы. В табл. 2.5 приведены численные
значения углового перемещения ψ, угловой скорости K и углового ускорения K кулисы, а так же координаты XC, YC и скорости VC точки C свя-
зи механизма (рис. 2.36, б). При расчетах были приняты: длина кривошипаOA = 0,3 м, межосевое расстояние OB = 0,8 м, длина кулисы BC = 1,4 м.
Угловая скорость кривошипа равна = 1 с–1.
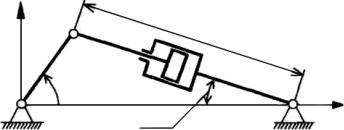
В гидроили пневмоприводах применяются механизмы с ведущим поршнем на звене, скользящем в качающемся цилиндре. Например, при приготовлении бетонных смесей в гравитационных смесителях циклического действия типа СБ–138, СБ–93 для наклона траверсы используют кулисные механизмы с пневмоцилиндрами. Подобные механизмы используют в смесителях такого типа и для открывания крышки люка разгрузки [2].
Схематично механизм с качающимся цилиндром представлен на рис. 2.37.
|
|
87 |
Y |
|
|
A |
|
S |
O |
C |
B X |
|
S |
|
Рис. 2.37. Механизм с качающимся цилиндром
Применительно к упомянутым выше смесителям, траверса или крышка люка связаны со звеном ОА. Звенья АС и СВ с поступательной парой С и вращательными кинематическими парами А и В образуют структурную группу II класса 3-го вида. Обобщенной координатой в данном случае является переменное расстояние s. Найдем зависимость φ(s) углового положения звена ОА от обобщенной координаты. Из рис. 2.37 видно, что на основании теоремы косинусов имеет место следующее равенство:
|
|
|
|
|
|
s2 2OA 2OB 2 OA OB cos . |
(2.63) |
|||||
|
|
|
Откуда |
|
|
|
|
|
||||
|
|
|
|
|
|
arccos |
2OB 2OA s2 |
. |
(2.64) |
|||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 OB OA |
|
||||
|
Следовательно, угловое положение звена ОА является функцией пе- |
|||||||||||
ременной длины s. |
|
|
|
|
|
|||||||
|
Угловая скорость того же звена будет определяться аналогично (2.62) |
|||||||||||
|
|
|
|
|
|
|
|
|
d |
V , |
(2.65) |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
OA |
|
ds П |
|
||
где |
|
d |
1 |
– аналог угловой скорости звена ОА по обобщенной коор- |
||||||||
|
|
|
|
|
||||||||
|
|
|
||||||||||
|
|
ds |
м |
|
|
|
|
|
|
|
||
динате s; |
|
|
|
|
|
|
|
|
|
|||
V |
ds м |
– относительная скорость перемещения поршня со штоком |
||||||||||
П |
|
dt c |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
АС относительно качающегося цилиндра.
Аналог угловой скорости определится дифференцированием функции (2.64) по обобщенной координате. Имеем

|
|
88 |
|
|
|
d |
|
2s |
. |
(2.66) |
|
ds |
4 2OB 2OA ( 2OB 2OA s2 )2 |
||||
|
|
|
Подставив аналог угловой скорости (2.66) в формулу (2.65) найдем закон изменения угловой скорости ведомого звена ОА. Таким образом,
угловая скорость является функцией двух переменных OA (s, VП).
Звено ОА всегда будет иметь угловое ускорение, даже если относительная скорость поршня VП = const. При таком условии дифференцирование функции (2.65) по времени дает
|
OA |
|
d 2 |
V 2 |
, |
(2.67) |
|
||||||
|
|
ds2 П |
|
|
||
где аналог углового ускорения
d 2 |
|
4 2OB 2OA (( 2OB 2OA )2 s4 ) |
. |
(2.68) |
|
ds2 |
(4 2OB 2OA ( 2OB 2OA s2 )2 )3/ 2 |
||||
|
|
|
Используя формулы угловой скорости (2.65) и углового ускорения (2.67) можно найти линейные скорость и ускорение любой точки звена ОА в механизме с качающимся цилиндром. Механизмы с гидроцилиндрами играют ключевую роль в подъемно-транспортных машинах, таких как экскаваторы, погрузчики.
2.5.7.Кинематика механизмов с двумя ведущими звеньями
Вмеханических системах, которые принято называть манипуляторами, структурная схема построена таким образом, чтобы рабочие органы (захваты) были бы способны совершать разнообразные механические движения. Целесообразность движений подсказывается практикой перемещения транспортируемого груза и его ориентацией в пространстве. Кинематические цепи таких механических систем могут быть открытыми.
Звенья механизма, к которым приложены движущие силы называют входными или ведущими. Количество ведущих звеньев, как правило, равно числу степеней свободы (подвижностей) механизма. В свою очередь и число обобщенных координат равно числу степеней свободы. Для механизма с жесткими звеньями, у которого n степеней свободы, всегда можно подобрать n обобщенных координат.
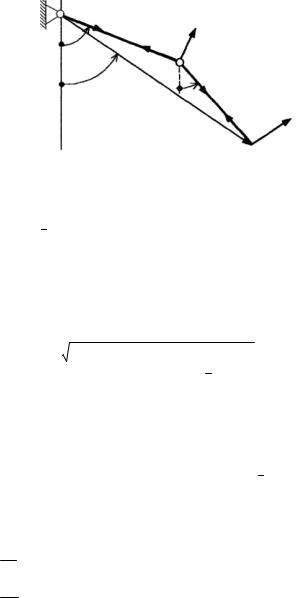
У механизма, показанного на рис 2.38, две обобщенные координаты φ, ψ по количеству степеней свободы. Однако это открытая кинематиче-
ская цепь, так как со стойкой связано только звено OL . В задачах кине-
матики по определению положений звеньев таких механизмов, а также скоростей и ускорений точек звеньев обычно используют векторный анализ [5].
89
Определим положение звеньев механизма в полярной системе координат.
O |
e1 |
|
|
φ |
e1 |
|
|
e |
|
||
|
1 |
|
|
|
α |
L |
|
|
|
e2 |
|
|
|
ψ |
|
|
|
|
|
|
|
|
|
|
|
r |
e2 |
|
|
|
|
|
|
|
|
|
|
|
e2 |
|
|
|
K |
Рис. 2.38. Векторный анализ для механизма манипулятора с двумя степенями свободы
Положение точки К механизма будет полностью определено радиу- сом-вектором r и углом α, как показано на рис. 2.38. Обозначим длины
звеньев OL , |
LK и введем единичные векторы e1, |
e2 . Очевидно, что |
||
существует векторное равенство |
|
|||
|
|
|
OLe1 LK e2. |
(2.69) |
|
r |
|||
Если равенство (2.69) возвести в квадрат, то для модуля радиусавектора получим следующее выражение:
r |
2OL 2 LK 2 OL LK cos( ). |
(2.70) |
Угловое положение α радиуса-вектора r можно определить так:
arcsin |
OL sin LK sin |
. |
(2.71) |
|
|||
|
r |
|
|
Таким образом, положение точки К механизма в полярной системе координат r (φ, ψ), α(φ, ψ) описывается с помощью двух обобщенных координат согласно выражений (2.70), (2.71).
Скорость для точки К есть изменение вектора r во времени. Дифференцируя (2.69) получим:
|
|
dr |
|
дr |
|
дr |
, |
(2.72) |
|
V |
|||||||||
д |
д |
||||||||
|
|
dt |
|
|
|
|
|||
где ddt – угловая скорость звена OL,
ddt – угловая скорость звена LK.