

Uch_posobie_TMM
.pdf50
смещения оси перемещения звена 3 относительно оси X0 . Со звеньями 0, 1, 2 и 3 связаны системы координат X0Y0 , X1Y1, X2Y2 и X3Y3 . Начала координат систем расположены в центрах вращательных кинематиче-
ских пар А, В и |
С. Уравнение преобразования координат для кинема- |
||||||||||||||
тической цепи механизма имеет вид: |
|
|
|
|
|
|
|
|
|||||||
|
|
X0(C) = V10 |
L21 + V21 |
|
L32 |
+ V32 X3(C) |
, |
||||||||
(2.22) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3(C ) |
|
0 |
|
|
|
|
|
|
|
|
|
|
||
где X3(C) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
- матрица-столбец координат точки C в сис- |
|||||||||||
|
y |
|
|
0 |
|
|
|
|
|
|
|
|
|
||
теме X3Y3; |
|
3(C ) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X0(C) = |
x0(C ) |
|
x |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
= |
C - матрица-столбец координат точки C в |
||||||||||
|
y |
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
0(C ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
системе X0Y0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Матрицы поворотов во вращательных парах и параллельных пере- |
|||||||||||||||
носов вдоль звеньев имеют вид: |
|
|
|
|
|
|
|
|
|||||||
|
|
V32 |
= сos 2 |
-sin 2 ; |
L32 |
= l2 |
; |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 2 |
cos 2 |
|
|
|
0 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V21 |
= |
|
сos |
-sin |
|
L21 = |
l |
|
; |
|
|||
|
|
|
|
1 |
1 |
; |
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
sin 1 |
cos 1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V10 |
= |
|
сos |
-sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
Произведя действия над матрицами в соответствии с выражением (2.22), получим систему уравнений:
l1cos 0 + l2cos( 0 1 ) = xс, |
|
l1sin 0 + l2sin( 0 1 ) = e. |
(2.23) |
|
|
|
|
|
|
|
51 |
|
|
Для упрощения решения уравнений следует учесть, что |
|||||||||
|
|
0 1 2 2π. |
|
|
|
||||
В результате решения получаем следующие зависимости: |
|||||||||
xC l1 cos 0 |
l22 (e l1 sin 0 )2 ; |
|
|
||||||
|
2 |
arcsin l1 sin 0 e ; |
|
|
|
|
|||
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 2 ( 0 2) . |
|
|
|
|
|
||||
При дифференцировании полученных выражений по 0 определя- |
|||||||||
ются искомые величины аналогов скоростей и ускорений. |
|
||||||||
Четырехзвенный механизм структуры 1 - 2(3): |
|
|
|||||||
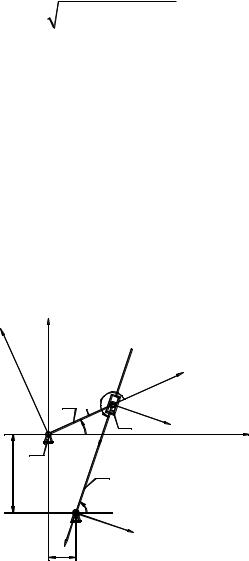
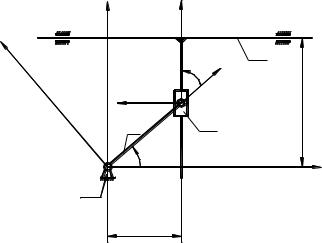
На рис. 2.21 показана схема кулисного механизма, в состав которо- |
|||||||||
го входит структурная группа 2-го класса 3-го вида, образованная звень- |
|||||||||
ями 2 и 3. Входное звено – звено 1. l1 – длина кривошипа |
АВ. Со звень- |
||||||||
ями 0, 1, 2 и 3 связаны системы координат X0Y0, X1Y1 |
, |
X2Y2 и X3Y3 . |
|||||||
Начала координат систем расположены в центрах вращательных кине- |
|||||||||
матических пар |
А, В и С. XC |
и |
YC - координаты точки С в системе |
||||||
X0Y0 . |
|
|
Y0 |
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 1 |
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
l1 |
|
B |
|
|
|
|
|
|
A |
|
0 |
2 |
Y2 |
X 0 |
|
|
|
|
|
|
|||||
|
|
|
O |
|
|
X 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yC |
|
|
3 |
|
|
|
|
|
|
|
|
C |
2 |
|
|
|
|
|
|
|
|
X 3 |
|
|
Y3 |
|
|
|
|
|
|
xC |
|
|
|
|
|
52
Рис. 2.21. Кулисный механизм
Уравнение преобразования координат будет иметь вид
X0(C) |
= V10 |
|
L21 |
+ V21 L32 |
+ V32 X3(C) |
, |
(2.24) |
||||||||
где X3(C) = |
x |
|
|
|
0 |
|
- матрица-столбец координат точки C в сис- |
||||||||
|
3(C) |
= |
|
||||||||||||
|
y |
|
|
|
0 |
|
|
|
|
|
|
|
|
||
|
|
3(C) |
|
|
|
|
|
|
|
|
|
|
|||
теме X3Y3; |
x |
|
|
|
x |
|
|
|
|
|
|
|
|||
X0(C) = |
|
|
= |
|
|
|
|
|
|
|
|||||
|
0(C) |
|
|
|
C - матрица-столбец координат точки C в |
||||||||||
|
y |
|
|
|
y |
|
|
|
|
|
|
|
|||
|
|
0(C) |
|
|
|
|
C |
|
|
|
|
|
|
||
системе X0Y0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Матрицы Vi,i-1 |
|
и Li,i-1 |
будут определяться следующим образом: |
||||||||||||
|
|
V32 = 1 0 |
; |
L32 = lBC ; |
|
|
|
||||||||
|
|
|
|
0 1 |
|
|
|
0 |
|
|
|
||||
|
|
V21 = |
сos |
-sin |
|
|
l |
|
; |
|
|||||
|
|
|
|
|
|
1 |
1 |
; |
L21 = 1 |
|
|
||||
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
sin |
|
|
0 |
|
|
||||||
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
||
|
|
V10 |
= |
|
сos |
-sin |
|
|
|
|
|
||||
|
|
|
|
|
|
0 |
|
0 |
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
|
|
|
|
|
|
sin |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
Произведя преобразования согласно (10), получим систему уравне-
ний: |
|
|
|
|
|
l1cos 0 |
+ |
l2cos( 0 1 ) |
= |
xС , |
|
l1sin 0 |
+ |
l2sin( 0 1 ) |
= |
yC . |
(2.25) |
Решая систему уравнений и учитывая, что
0 1 2 ,
получаем зависимости:
lBC l12 2l1(xC cos 0 yC sin 0 ) xC2 yC2 ;
2 arccosl1 cosl 0 xC ;
2
1 2 0 .
53
Дифференцированием полученных выражений по 0 получают ве-
личины соответствующих аналогов скоростей и ускорений.
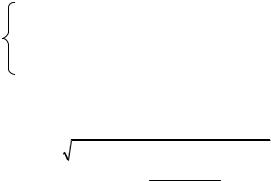
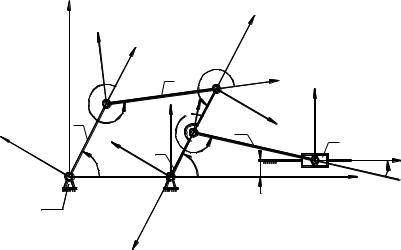
Четырехзвенный механизм структуры 1 - 2(4):
На рис. 2.22 показана схема механизма, в состав которого входит структурная группа 2-го класса 4-го вида, образованная звеньями 2 и 3. Входное звено – звено 1. Со звеньями 0, 1 и 2 связаны системы координат X0Y0 , X1Y1 и X2Y2 . Начала координат систем расположены в центрах вращательных кинематических пар А и В. XD (XD = а + с) и YD - координаты точки D в системе X0Y0 .
Рис. 2.22. Рычажный механизм структуры 1 – 2(4)
Уравнение преобразования координат будет иметь вид: |
|
||||||||
X0(D) = V10 |
|
L21 + V21 |
|
L32 + V32 X3(D) |
, |
(2.26) |
|||
где X3(D) = |
x |
|
|
= b - матрица-столбец координат точки D в сис- |
|||||
3(D) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
теме X3Y3; |
y3(D) |
|
|
c |
|
|
|
|
|
x0(D) |
|
|
a c |
|
|
|
|||
X0(D) = |
|
= |
- матрица-столбец координат точки D в |
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
|
y0(D) |
|
|
yD |
|
|
|
|
|
системе X0Y0.
Матрицы поворотов во вращательных парах и параллельных переносов вдоль звеньев при переходе от одной системы координат к другой будут определяться следующим образом:
54
V32 = сos 2 |
-sin 2 |
; L32 |
= 0 ; |
|||
|
cos 2 |
|
|
|
|
|
sin 2 |
|
|
0 |
|||
|
|
|
|
|
||
V21 = 1 0 ; |
L21 = lAB ; |
|
||||
0 1 |
|
0 |
|
|||
V10 = сos 0 |
-sin 0 |
. |
|
|
||
|
|
|
cos |
|
|
|
sin |
|
|
|
|
||
|
0 |
|
0 |
|
|
|
Произведя преобразования согласно (2.26), получим систему уравнений:
lAB cos 0 |
+ b cos( 0 |
2 ) |
- c sin( 0 |
2 ) |
|
= a + c , |
|
||||||
lAB sin 0 |
+b sin( 0 2 ) + c cos( 0 2 ) = |
|
yD . |
(2.27) |
|||||||||
Учитывая, что |
|
|
|
3 |
|
|
|
|
|
|
|
||
|
|
|
|
|
и |
|
|
3 , |
|
||||
а также, что |
2 |
|
2 |
0 |
|
0 |
|
2 |
|
2 |
|
||
|
|
|
|
|
|
|
3 |
|
|
|
|
||
|
cos |
3 |
= 0 |
и |
sin |
|
|
= -1 , |
|
||||
|
|
2 |
|
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
получаем систему уравнений (2.27) в следующем виде:
lAB cos 0 |
= |
a |
, |
lAB sin 0 |
- b |
= |
yD . |
Из данных уравнений находим искомые зависимости: a ,
cos 0
yD = lAB sin 0 - b .
Дифференцированием полученных выражений по 0 получаем величины соответствующих аналогов скоростей и ускорений.
|
|
55 |
|
|
|
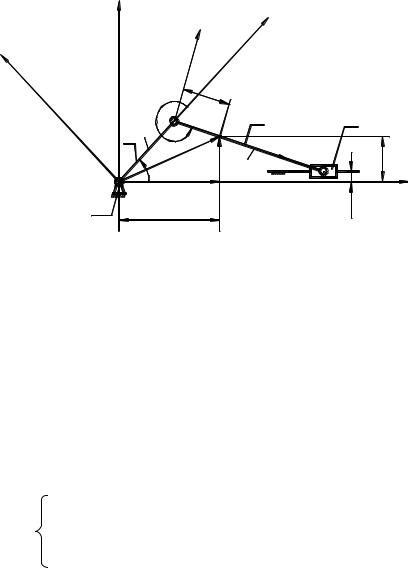
Четырехзвенный механизм структуры 1 - 2(5): |
|
||||
На рис. 2.23 показана схема механизма, в состав которого входит |
|||||
структурная группа 2-го класса 5-го вида, образованная звеньями 2 и 3. |
|||||
Входное звено – звено 1. l1 |
– длина кривошипа АВ. Со звеньями 0, 1 и 2 |
||||
связаны системы координат X0Y0 , |
X1Y1 и X2Y2 |
. Начала координат сис- |
|||
тем расположены в центрах вращательных кинематических пар А и В. |
|||||
XD и YD - координаты точки D в системе X0Y0 . |
|
|
|||
Y0 |
|
X 2 |
|
|
|
Y1 |
|
D |
|
3 |
C |
|
|
1 |
|
|
|
|
|
X 1 |
|
||
Y2 |
|
yD |
|||
B |
|
|
|||
|
|
|
|
||
|
1 |
2 |
|
|
|
A |
0 |
|
|
|
X 0 |
|
|
|
|
||
O |
|
|
|
|
|
|
xD |
|
|
|
|
Рис. 2.23. Рычажный механизм структуры 1 – 2(5) |
|||||
Уравнение преобразования координат будет иметь вид |
|
X0(D) = V10 ( L21 + V21 X2(D) ), |
(2.28) |
где X2(D) = x2(D) |
= |
|
|
|
|
y2(D)
теме X2Y2;
X0(D) = x0(D) =
y0(D)
теме X0Y0 .
Матрицы Vi,i-1
lBD - матрица-столбец координат точки D в сис-
0
x |
|
- матрица-столбец координат точки D в сис- |
D |
||
|
|
|
yD |
|
|
и Li,i-1 |
будут определяться следующим образом: |
|

56
|
сos |
-sin |
|
l |
|
; |
|
V21 = |
1 |
1 |
|
; L21 = |
1 |
|
|
|
|
cos 1 |
|
|
0 |
|
|
sin 1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
V10 = сos 0 |
-sin 0 |
. |
|
|
|
||
|
cos 0 |
|
|
|
|
||
sin 0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
Произведя преобразования согласно (2.28), получим систему уравнений:
l1cos 0 + lBDcos( 0 1 ) = xD ,
l1sin 0 |
+ lBDsin( 0 1 ) = yD . |
(2.29) |
Решая систему уравнений и учитывая, что
0 1 = π/2 ,
получаем зависимости:
xD = l1 cos 0 ;
lBD = yD – l1 sin 0 .
Дифференцированием полученных выражений по 0 получают величины соответствующих аналогов скоростей и ускорений.
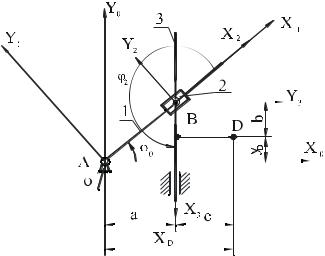
Последовательность кинематического анализа многозвенных механизмов 2-го класса
При кинематическом анализе многозвенного механизма его кинематическую цепь следует рассматривать как состоящую из простых кинематических цепей, представляющих собой замкнутые контуры. Определив кинематические характеристики для первого контура, в состав которого входит входное звено механизма, последовательно переходят к другим, исследуя таким образом движение всех звеньев механизма.
На рис. 2.24 показана кинематическая цепь шестизвенного механизма, состоящая из двух замкнутых контуров. Контур I образован стойкой 0 и подвижными звеньями 1, 2 и 3; контур II – стойкой 0 и подвижными звеньями 3, 4 и 5. Выходное звено 3 контура I является входным для контура II.
|
|
|
|
|
|
|
57 |
|
|
|
|
|
|
|
|
YI |
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
X 3 |
|
|
|
|
|
|
|
Y2I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X 1I |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
B |
|
2 |
2 |
|
|
XI2 |
Y5II |
|
|
|
||
|
|
|
|
C |
|
|
|
|
|
|
||||
I |
1 |
|
|
Y0II Y4II |
|
4 |
YI |
|
|
|
|
|||
Y1 |
|
|
II |
|
E |
II |
3 |
5 |
|
XII5 |
||||
|
|
Y3 |
3 |
|
|
|
|
X 4 |
F |
|
||||
|
|
0 |
|
|
|
|
4 |
e |
|
|
|
|
|
|
|
A |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
I |
II |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
O |
|
|
|
|
|
|
|
|
X 0 |
(X0 ) |
|
||
|
|
XI3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.24. Схема плоского шестизвенного рычажного механизма |
|
|
|||||||||||
Уравнения преобразования координат для каждого контура имеют следующий вид:
для контура I |
X0I = M30I X3I , |
||
для контура II |
X0II = M50II X5II , |
||
где X3I - матрица-столбец координат замыкающей точки контура I в |
|||
системе |
X3IY3I ; |
|
|
X0I |
- |
матрица-столбец координат замыкающей точки контура I в |
|
системе X0IY0I ; |
|
||
M30I - |
результирующая матрица преобразования для контура I ; |
||
X5II |
- |
матрица-столбец координат замыкающей точки контура II в |
|
системе X5IIY5II ; |
|
||
X0II |
- |
матрица-столбец координат замыкающей точки контура II в |
|
системе X0IIY0II ; |
|
||
M50II - |
результирующая матрица преобразования для контура II. |
||
Если при кинематическом анализе механизма необходимо определить кинематические характеристики движения точки, лежащей на звене, то составляется уравнение замкнутости контура кинематической цепи для этой точки. Например, требуется выполнить кинематический анализ движения точки К, лежащей на звене 2 кривошипно-ползунного механизма (рис. 2.25).
|
|
|
58 |
|
|
|
Y0 |
|
Y2 |
X1 |
|
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
1 |
K |
2 |
|
|
|
|
B |
|
3 |
|
||
|
1 l1 |
|
|
|||
|
K |
X2 |
C |
|
|
|
|
|
K |
|
|||
A |
|
0 |
l2 |
|
y |
X 0 |
|
|
|
||||
|
xK |
|
e |
|
|
|
O |
|
|
|
|
||
|
|
|
|
|
||
Рис. 2.25. Расположение точки К на звене механизма |
|
|||||
Уравнение преобразования координат точки К будет иметь вид:
X0(K) = V10 ( L21 + V21 X2(K) ), |
(2.30) |
где X2(K) = lK - матрица-столбец координат точки K в системе X2Y2;
0
X0(K) = xK - матрица-столбец координат точки K в системе X0Y0;
yK
Выполнив действия в соответствии с (16), получим систему уравне-
ний:
l1cos 0 |
+ |
lKcos( 0 |
1 ) |
= |
xK , |
(2.31) |
l1sin 0 |
+ |
lKsin( 0 |
1 ) |
= |
yK . |
|
Таким образом, имеем зависимости изменения координат точки К в
системе X0Y0 |
: xK = xK( 0 ), yK = yK( 0 ). |
Радиус-вектор r точки К: |
|
r xK yK . |
Длина радиуса-вектора r |
будет определена |
как |
59
r = xK2 yK2 .
Продифференцировав зависимости xK = xK( 0 ) и yK = yK( 0 ) по0 , определим величины аналогов скоростей и ускорений изменения
координат точки К, а затем и |
величины аналогов скорости и ускорения |
|||||
движения точки К. |
|
|
|
|
|
|
V |
K |
( |
0 |
) = |
x2 |
y2 ; |
|
|
|
K |
K |
||
aK( 0 ) = |
2 |
2 |
||||
xK |
yK . |
|||||
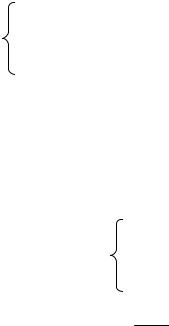
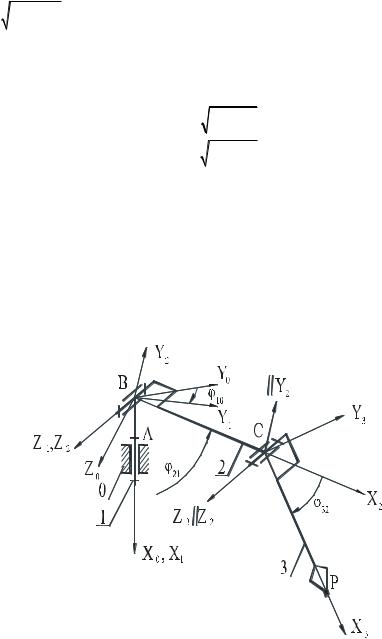
2.4.4. Кинематический анализ пространственных рычажных механизмов с открытыми кинематическими цепями
Рассматриваемый метод кинематического анализа очень удобен для определения кинематических характеристик движения звеньев пространственных рычажных механизмов, в том числе – с незамкнутыми кинематическими цепями. На рис. 2.26 показана структурная схема манипулятора с расположенными в шарнирах А, В и С координатными системами.