

Luciv / МКОИ_пособие
.pdfРисунок 2.6 Примеры текстур из альбома Бродатца: верхний ряд: D94,D4,D2,D20,D55,D68; нижний ряд: D84,D9,D76,D12,D27,D65.
2.2.3Метод оценки плотности и направления краев
Метод основан на выделении краев для обнаружения характерных признаков текстур. Количество краев в заданной области фиксированного размера является некоторой характеристикой заполнения этой области. В процессе выделения краев обычно вычисляются их направления. Эти значения также применяются для описания образа текстуры.
Рассмотрим область из N элементов. Предположим, что в результате обработки этой области оператором градиента для каждого элемента р были вычислены два значения: модуль (величина) градиента val(р) и направление градиента dir(p). Одним из простейших характерных признаков текстуры является плотность краев (количество краев на единицу площади):
Eedgeness = |
|
{p |
|
val( p) ≥ T } |
|
|
, |
|
|
|
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
N |
|||
где Т - некоторое пороговое значение. Плотность краев характеризует заполнение текстуры, но не ее ориентацию.
Полученную текстурную характеристику можно расширить, чтобы учесть заполнение текстуры и ориентацию ее контуров. Для этого можно использовать гистограммы модуля и направления градиента. Обозначим нормированную гистограмму, построенную по значениям модуля градиента в элементах области R, а Hdir - нормированную гистограмму направления градиента. Обе гистограммы обычно содержат небольшое фиксированное количество разрядов (порядка 10), соответствующих диапазонам значений модуля и направления градиента. Обе гистограммы нормируются посредством деления на размер NR области R. Тогда количественное описание текстуры области R имеет вид пары гистограмм:
Fval dir = (H val (R), H dir (R)).
Рассмотрим два изображения размерами 5х5 на рис. 2.7 [18]. Изображение слева заполнено больше, чем изображение справа. На левом изображении края присутствуют во всех 25 элементах, так что плотность краев равна 1,0. Правое изображение содержит 6 краев на 25 элементов, таким образом, плотность краев равна 0,24.
61
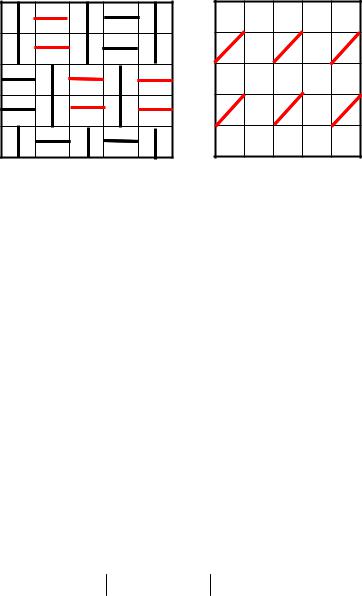
Будем строить двухразрядные гистограммы модуля градиента. Два разряда соответствуют темным (черный цвет) и светлым (красный цвет) краям. На гистограммах направления градиента выберем три разряда для горизонтальных, вертикальных и диагональных краев.
Рисунок 2.7 Два изображения с различными текстурными характеристиками плотности и направления краев
На изображении слева присутствуют 6 темных и 19 светлых краев. Нормированная гистограмма модуля градиента для этого изображения имеет вид (0,24; 0,76). Это значит, что 24% краев являются темными, а 76% - светлыми. На левом изображении есть 12 горизонтальных и 13 вертикальных краев, а диагональных краев нет. Нормированная гистограмма направления градиента будет иметь вид (0,48;0,52; 0,0) -48% горизонтальных краев, 52% вертикальных, и 0% диагональных.
На правом изображении содержится 6 светлых краев, а темных краев нет. Нормированная гистограмма модуля градиента равна (0.0, 0.24). На этом изображении есть только диагональные края, поэтому гистограмма направления градиента имеет вид (0.0, 0.0, 0.24).
В рассмотренном примере для различения двух изображений достаточно признака плотности краев, но гистограммные признаки являются более мощным методом описания текстур.
Для сравнения двух n-разрядных гистограмм Н1 и Н2 можно вычислить расстояние L1 между гистограммами:
n |
|
L1(H1, H 2 ) = ∑ H1(i) − H 2 (i) . |
(2.23) |
i=1
2.2.4Метод локального двоичного разбиения
Локальное двоичное разбиение представляет собой еще одну простую, но практически полезную текстурную характеристику [18]. На изображении выполним сравнение значения интенсивности каждого элемента р и восьми его соседей. Результаты проверки 8 соседей можно представить в виде 8- разрядного двоичного числа b1,b2 ,b3,b4 ,b5 ,b6 ,b7 ,b8 . БИТ bi = 0, если интенсивность i-го соседа меньше или равна интенсивности р. В противном случае bi = 1. По этим числам можно построить гистограмму и использовать ее в качестве описания текстуры изображения. Для сравнения двух изображений
62
или областей подходит критерий на основе расстояния L1 между двумя гистограммами в соответствии с (2.23).
2.2.5Метод формирования энергетических характеристик Лавса
На статистическом подходе к описанию текстур основан и метод описания текстур энергетическими характеристиками Лавса (Laws) [18]. Лавс разработал энергетический подход, в котором оценивается изменение характера текстуры в пределах окна фиксированного размера. Для вычисления энергетических характеристик используется набор из девяти масок размерами 5x5. Затем энергетические характеристики каждого элемента анализируемого изображения представляются в виде вектора из 9 чисел. Для вычисления масок используются следующие векторы:
L5 = [1 4 6 4 1]T |
|
E5 = [− 1 − 2 0 2 1]T |
(2.24) |
S5 = [− 1 0 2 0 − 1]T |
|
R5 = [1 − 4 6 − 4 1]T |
|
Здесь T означает транспонирование. Вектор L5 предназначен для вычисления симметричного взвешенного локального среднего значения. Вектор Е5 предназначен для обнаружения краев, S5 -для обнаружения пятен (spot), a R5 - для обнаружения образа в виде ряби (ripples). Двумерные маски вычисляются умножением пар векторов. Например, для получения маски L5R5 надо умножить вектор L5 на R5T:
|
1 |
|
1 |
− 4 |
6 |
− 4 |
1 |
|
L5R5T |
4 |
|
4 − 16 |
24 |
− 16 |
4 |
|
|
= 6 × [1 |
− 4 6 − 4 |
1] = 6 |
− 24 |
36 |
− 24 6 |
(2.25) |
||
|
4 |
|
4 |
− 16 |
24 |
− 16 |
4 |
|
|
1 |
изображения |
1 |
− 4 |
6 |
− 4 |
1 |
области |
Фильтрация |
такой |
маской |
позволяет выделить |
|||||
«ряби».
Всего формируется 16 масок аналогично тому, как вычислено в (2.25). Маски (конечные импульсные характеристики фильтров) приведены в табл. 2.3
На первом шаге в методе Лавса устраняется влияние интенсивности освещения. Для этого по изображению перемещается небольшое окно и из значения каждого элемента вычитается локальное среднее значение. В результате данной предварительной обработки формируется изображение, на котором средняя интенсивность окрестности каждого элемента близка к 0. Размер окна зависит от типа изображений. Для естественных сцен предлагается выбирать окно размерами 15х15.
После предварительной обработки выполняется свертка полученного изображения с каждой из шестнадцати масок размером 5х5.
63
Таблица 2.3 Таблица масок Лавса
|
L5E5 |
L5R5 |
E5R5 |
E5E5 |
|
|
|
|
|
|
|
|
E5L5 |
R5L5 |
R5E5 |
S5S5 |
|
|
|
|
|
|
|
|
L5S5 |
E5S5 |
S5R5 |
R5R5 |
|
|
|
|
|
|
|
|
S5L5 |
S5E5 |
R5S5 |
|
|
|
|
|
|
|
|
В результате формируются шестнадцать изображений. Обозначим через |
|||||
Fk [i, j] результат фильтрации элемента [i,j] |
с использованием k -й маски. |
||||
Тогда энергетическая текстурная карта Ek [r, c] для фильтра k определяется выражением:
7 |
7 |
|
|
Ek (r, c) = ∑ |
∑ |
Fk (r + i, c + j ) |
(2.26) |
i =−7 j =−7
Каждая текстурная энергетическая карта является полноразмерным изображением, которое представляет результаты свертки входного изображения с k-й маской.
После получения шестнадцати энергетических карт каждая симметричная пара карт заменяется усредненной картой в соответствии с формулой:
Ekl (r, c) = (Ek (r, c) + El (r, c)) 2 . |
(2.27) |
Например, маска E5L5 характеризует содержание горизонтальных краев, a L5E5 - вертикальных. Среднее двух этих карт будет характеризовать наличие на изображении краев обоих типов. В результате строятся девять окончательных карт. Перечень девяти окончательных энергетических карт приведен в табл. 2.4.
Таблица 2.4 Перечень энергетических карт Лавса
1 |
L5E5/E5L5 |
6 |
L5S5/S5L5 |
|
|
|
|
2 |
L5R5/R5L5 |
7 |
E5E5 |
|
|
|
|
3 |
E5S5/S5E5 |
8 |
E5R5/R5E5 |
|
|
|
|
4 |
S5S5 |
9 |
S5R5/R5S5 |
|
|
|
|
5 |
R5R5 |
|
|
|
|
|
|
Девять изображений энергетических карт можно рассматривать как 9- ти-мерный вектор признаков. При такой интерпретации каждому элементу изображения соответствует вектор из 9 текстурных признаков. Эти текстурные признаки можно использовать для кластеризации изображения на области с одинаковой текстурой.
2.2.6Метод формирования гистограммных признаков второго порядка
Метод основан на статистическом описании текстуры. Оценка признаков текстур строится по матрице рассеяния. Эта матрица в разных
64
источниках называется по-разному (матрица вхождений), в англоязычной литературе применяется термин «co-occurrence matrix». Матрица рассеяния - это двумерный массив N, в котором индексы строк и столбцов образуют множество V допустимых на изображении значений элементов. Для полутоновых изображений V - множество допустимых значений интенсивности (яркости).
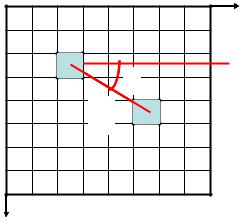
Значение N d (a,b) указывает, сколько раз значение a встречается в изображении в некотором заданном пространственном отношении d со значением b [16]. Например, пусть множество V представляет собой множество значений яркости, а пространственное отношение описывается вектором d (см.
рис. 2.8).
x1 x2
x
y1 |
θ |
|
y2 |
d |
|
y
Рисунок 2.8 Формирование матрицы рассеяния
Этот вектор задает смещение между элементом с яркостью a и элементом с яркостью b (отмечены зеленым цветом) и представляется в виде: d = [dy, dx]T ,
где dy - смещение по строкам (y2 − y1 ), dx - смещение по столбцам (x2 − x1 ). Полутоновая матрица рассеяния Nd для изображения V определяется
выражением:
Nd = {[y, x] |
|
V[y, x] = a & V[y + dy, x + dx] = b}. |
(2.28) |
|
На рис. 2.9 показаны три различные матрицы рассеяния N01 , N10 и N11 для одного и того же фрагмента изображения V, размер которого равен 5x5 элементов.
В матрице N01 элемент с адресом (1,0) равен 4. Это значит, что переход яркости из значения 1 ( a =1) в значение 0 ( b = 0 ) в двух соседних элементах, расположенных на одной строке, встречается 4 раза в рассматриваемом фрагменте изображения. Адреса ячеек a , соответствующие этим переходам во фрагменте изображения: (0,0), (2,0), (3,0), (4,0).
65

В матрице N11 все элементы представляют собой значения числа
переходов значения яркости из a |
в b при смещении из адреса (i-1,j-1) в |
|||||||||||||||
адрес (i,j). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
0 |
0 |
1 |
|
a |
b |
|
|
a |
|
a |
|
|
|
0 |
|
2 |
2 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
b |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
0 |
2 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
i |
|
|
|
|
|
|
|
N01 |
|
N10 |
N11 |
|||||
1 |
|
0 |
2 |
0 |
1 |
|
|
|||||||||
|
|
|
|
|||||||||||||
|
1 |
|
0 |
2 |
0 |
1 |
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
|
2 |
4 |
4 |
|
4 |
1 |
3 |
|
|
0 |
1 |
3 |
4 |
|
|
|
|
|
|
|
|
|
a |
1 |
|
|
|
|
4 |
0 |
0 |
|
1 |
6 |
0 |
|
2 |
0 |
1 |
|
||
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
3 |
1 |
2 |
N01 |
2 |
0 |
3 |
N10 |
|
3 |
1 |
1 |
N11 |
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.9 Примеры матриц рассеяния
Из матрицы рассеяния формируется нормированная матрица рассеяния. При нормировке каждый элемент матрицы рассеяния делится на сумму всех элементов матрицы рассеяния, то есть на общее число возможных переходов при заданном векторе смещения d [19]. Значения элементов вычисляются по формуле:
p(a,b) = N d (a,b) ∑∑ N d (a,b) |
(2.29) |
ab
Вэтом случае матрицу рассеяния интерпретируют в терминах гистограммы второго порядка. Матрица рассеяния используется для оценки признаков текстур. В качестве признаков используются следующие признаки.
Ковариация вычисляется в соответствии с:
|
2 L −12 L −1 |
|
|||||||
BC = |
∑ ∑ (a − |
|
|
)(b − |
b |
)p(a,b) |
(2.30) |
||
a |
|||||||||
|
a =0 b =0 |
|
|||||||
Момент инерции (контраст): |
|
||||||||
|
2 L −12 L −1 |
|
|||||||
BI = |
∑ |
∑ (a − b)2 p(a,b) |
(2.31) |
||||||
|
a =0 b =0 |
|
|||||||
Средняя абсолютная разность: |
|
||||||||
|
2 L −12 L −1 |
|
|||||||
BV = |
∑ |
∑ |
a − b |
p(a,b) |
(2.32) |
||||
a =0 b =0
Энергия
66

2 L −12 L −1 |
|
|
|
|
|
|
|
|
||
BN = ∑ |
∑ [p(a,b)]2 |
|
|
|
|
|
|
|
(2.33) |
|
a =0 b =0 |
|
|
|
|
|
|
|
|
||
Энтропия |
|
|
|
|
|
|
|
|
|
|
2 L −12 L −1 |
[p(a,b)] |
|
||||||||
BE = − ∑ |
∑ p(a,b)log2 |
(2.34) |
||||||||
a =0 b=0 |
|
|
|
|
|
|
|
|
||
Обратная разность |
|
|
|
|
|
|
|
|
||
2 L −12 L −1 |
|
(a − b)2 ] |
|
|||||||
BD = ∑ |
∑ p(a,b) [1 + |
|
(2.35) |
|||||||
a =0 b=0 |
|
|
|
|
|
|
|
|
||
Однородность |
|
|
|
|
|
|
|
|
||
2 L −12 L −1 |
|
|
|
|
|
|
|
|
||
Bhom = ∑ |
∑ p(a,b) [1 + |
|
a − b |
|
] |
(2.36) |
||||
|
|
|||||||||
a =0 b =0 |
|
|
|
|
|
|
|
|
||
Коэффициент корреляции |
|
|
|
|
|
|
|
|
||
2 L −12 L −1 |
|
|
|
|
|
|
||||
rC = ∑ |
∑ abp(a,b) − |
|
|
b |
[σaσb ] |
(2.37) |
||||
a |
||||||||||
|
b =0 |
|
|
|
|
|
|
|||
a =0 |
|
|
|
|
|
|
||||
Математическое ожидание яркости вычисляется в соответствии с:
|
|
|
|
|
2 L −12 L −1 |
|
|
|
|
|
= |
∑ |
∑ ap(a,b) |
(2.38) |
|
a |
|||||||
|
|
|
|
|
a =0 |
b =0 |
|
|
|
|
|
|
2 L −12 L −1 |
|
|
b = |
∑ |
∑bp(a,b) |
(2.39) |
||||
|
|
|
|
|
a =0 |
b =0 |
|
Среднее квадратическое отклонение вычисляется в соответствии с:
|
2 L −12 L −1 |
|
|||||
σa = |
∑ |
∑ a 2 p(a,b) − |
|
|
2 |
(2.40) |
|
a |
|||||||
|
a =0 b=0 |
|
|||||
|
|
|
|||||
|
2 L −12 L −1 |
|
|||||
σb = |
∑ |
∑b2 p(a,b) − |
b |
2 |
(2.41) |
||
|
a =0 |
b =0 |
|
||||
При вычислении текстурных характеристик на основе матриц рассеяния необходимо решить задачу выбора вектора смещения d. В [18] в качестве критерия используется статистическая проверка по критерию хи-квадрат χ2 для выбора вектора смещения d:
χ2 (d) = ∑∑ |
p 2 |
(a,b) |
|
− 1 |
(2.42) |
|
p(a)p(b) |
||||||
a b |
|
|
||||
|
|
|
|
|
||
В соответствии с этим критерием наиболее выраженной структуре текстурного образа соответствует значение вектора смещения, при котором достигается максимум величины χ2 (d):
d = arg max(χ2 (d)) |
(2.43) |
|
67 |
При этом |
|
p(a) = ∑ p(a,b) |
(2.44) |
b |
|
p(b) = ∑ p(a,b) |
(2.45) |
a |
|
Выводы
Эффективность сегментации текстур зависит от способа описания текстур. Наряду с фрактальным описанием текстур, рассмотренным в [1], получили применение методы, основанные на статистическом подходе к описанию тектсур.
Описание текстур моментами функции распределения яркости может быть использовано для сегментации текстур в том случае, когда они различаются этими моментами. Область применения ограничена.
Энергетические характеристики Лавса позволяют построить 9 энергетических карт. Пространство признаков становится 9-ти мерным. Для повышения эффективности сегментации необходимо выполнять НЧ фильтрацию признаков.
Гистограммные признаки второго порядка основаны на различении текстур ЗС, учитывают пространственные отношения элементов изображения. Необходимо применять метод главных компонентов для сокращения пространства признаков.
2.3Методы пороговой обработки изображений
Методы пороговой обработки предназначены для сегментации изображения, позволяющей выделить цель на фоне, используя яркостные, текстурные и др. признаки.
Большинство методов пороговой обработки основано на статистиках одномерных (1D) гистограмм полутоновых изображений и на статистиках двумерных (2D) матриц рассеяния изображения [1]. Разработаны параметрические и непараметрические методы определения порогов. При параметрическом подходе для определения порога используется распределение уровней полутонового изображения, пороговое ограничение сохраняет моменты распределения, то есть изображение, ограниченное по порогу, имеет те же самые моменты, что и оригинальное изображение. При непараметрическом подходе пороги получаются в результате процедур оптимизации в соответствии с некоторым заданным критерием. К этому подходу относится и метод Оцу. Процедура определения порога построена по критерию максимума межкластерной дисперсии путем полного перебора [1]. Отличие 2D методов пороговой обработки от 1D методов состоит в том, что вместо гистограмм распределения яркостей используется учет пространственных связей яркостей, то есть гистограммы второго порядка.
68

2.3.1Методы анализа гистограмм
Эти методы основаны на оценке порога по форме гистограмм яркости изображений.
Один метод основан на известном законе распределения яркости изображения объекта: объект ярче фона и занимает 1/p часть изображения. В этом случае порог T устанавливается равным 1/p квантили справа (предполагается, что объект ярче фона).
Второй метод основан на поиске пиков гистограммы яркости. В качестве порогового значения может выбираться среднее значение мод гистограммы или значение локального минимума между двумя модами гистограммы. Для повышения эффективности этого метода используется НЧ фильтрация гистограммы изображения, с тем, чтобы исключить из рассмотрения локальные максимумы гистограммы, обусловленные дисперсией яркости фона и объекта.
2.3.2Методы кластеризации
Эти методы основаны на решении задачи кластеризации при числе кластеров, равных двум. В частности, к этим методам относится метод Оцу для порогового ограничения изображений. Рассмотрим его подробнее. Задача ставится таким образом. Необходимо оценить пороговое значение fT , минимизирующее взвешенную сумму внутрикластерных дисперсий для двух кластеров, сформированных после разделения по порогу fT [19]. Это то же, что и установление порога, обеспечивающего получение максимума межкластерной дисперсии [20]. Метод Оцу разработан при следующих допущениях: гистограмма является бимодальной; не учитываются пространственные соотношения элементов изображения и текстурные свойства; оцениваются статистики стационарных процессов, но могут учитываться локальные признаки; предполагается равномерное освещение, при котором бимодальность гистограммы обусловлена различными характеристиками объектов.
Пусть изображение является двумерной функцией яркости и содержит N
элементов |
с уровнями |
яркости |
от |
1 до L. Если n f - |
число элементов, |
имеющих |
яркость f, |
то p( f ) |
- |
вероятность яркости |
f в изображении |
вычисляется как |
|
|
|
|
|
p( f ) = n f |
N |
|
|
|
(2.46) |
В случае квантования изображения на два уровня, элементы делятся на два кластера, C1 с уровнями яркости [1, …, fT ] и C2 с уровнями яркости [ fT +1, …, L]. Вероятности для этих двух кластеров зависят от порогового значения и определяются как суммы частот значений яркости, принадлежащих кластеру:
69

fT |
|
q1( fT ) = ∑ p( f ), |
(2.47) |
f =1 |
|
L |
|
q2 ( fT ) = ∑ p( f ) |
(2.48) |
f = fT +1
Поскольку все изображение по пороговому значению сегментируется на 2 кластера, то сумма вероятностей кластеров равна 1:
q1( fT ) + q2 ( fT ) = 1. |
(2.49) |
|||||
Средние значения для кластеров C1 и C2 вычисляются в соответствии с: |
||||||
fT |
fp( f ) |
|
||||
µ1( fT ) = ∑ |
|
|
|
|
|
(2.50) |
|
|
|
|
|
||
f =1 q1( fT ) |
|
|||||
L |
|
fp( f ) |
|
|||
µ2 ( fT ) = ∑ |
|
|
|
|
(2.51) |
|
|
|
|
|
|||
f = fT q2 ( fT ) |
|
|||||
Пусть µ есть среднее значение яркости для всего изображения. Среднее значение яркости в изображении определяется как сумма взвешенных с вероятностью класса значений математических ожиданий:
µ = q1µ1 + q2µ2 .
Внутрикластерные дисперсии вычисляются в соответствии с уравнением:
σ2 |
( f |
|
) = |
fT |
|
( f |
|
)]2 p( f ) |
|
( f |
|
), |
|
|||||
T |
∑[ f |
− µ |
T |
q |
T |
(2.52) |
||||||||||||
1 |
|
|
f =0 |
1 |
|
|
|
|
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ2 |
( f |
T |
) = |
∑L [ f |
− µ |
2 |
( f |
T |
)]2 p( f ) |
|
q |
2 |
( f |
T |
). |
(2.53) |
||
2 |
|
|
f = fT |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Суммарная внутрикластерная дисперсия вычисляется в соответствии с:
σ |
= q ( f |
T |
)σ2 ( f |
T |
) + q |
2 |
( f |
T |
)σ2 ( f |
T |
). |
(2.54) |
W |
1 |
1 |
|
|
2 |
|
|
|||||
|
Дисперсия изображения (суммарная дисперсия) не зависит от порога и |
|||||||||||
вычисляется в соответствии с уравнением: |
|
|||||||||||
σ2 = ∑L ( f |
− µ)2 p( f ) |
|
|
|
|
|
|
(2.55) |
||||
|
f =1 |
|
|
|
|
|
|
|
|
|
|
|
Межкластерная дисперсия равна сумме взвешенных квадратов расстояний между центрами (средними значениями) кластеров и глобальным средним значением:
σ2 |
= q (µ − µ)2 + q |
2 |
(µ |
2 |
− µ)2 |
(2.56) |
||||
B |
1 |
1 |
|
|
|
|
|
|||
|
Для любого заданного порога дисперсия равна сумме взвешенной |
|||||||||
внутрикластерной дисперсии и межкластерной дисперсии. |
|
|||||||||
σ2 = σ2 |
( f |
T |
) + σ2 |
( f |
T |
). |
|
|
(2.57) |
|
|
w |
|
B |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
70 |
|