

3 Порядок проведения расчета маховика методом проф. Ф. Виттенбауэра
Метод профессора Фердинанда Виттенбауэра (немецкий ученый) является более точным методом по сравнению с другими методиками (см. Введение). Он основан на графо-аналитическом расчете определения момента инерции маховика Jмах. По методу Ф. Виттенбауэра на основании ранее построенных графиков изменения (приращения) кинетической энергии ΔТ(φ) и осевого приведенного момента инерции Jпр(φ) необходимо построить диаграмму энергомасс ΔТ(Jпр). Тогда момент инерции маховика определиться по формуле
![]() ,
(3.1)
,
(3.1)
где ΔТmax – наибольший перепад кинетической энергии звеньев, δ – коэффициент неравномерности хода машины, ωср – средняя угловая скорость ведущего звена (коленчатого вала).
Порядок расчета заключается в следующем:
Вычертить механизм в 6-и положениях, начиная с «мертвого». Определить ход Smax поршня (ползуна).
Для каждого положения построить план скоростей и рассчитать все действительные значения скоростей.
Построить индикаторную диаграмму для механизмов двигателей и компрессоров. Построить механическую характеристику для механизмов прессов, насосов и станков.
Определить внешние силы, действующие на поршень (ползун). Для двигателей внутреннего сгорания определить силы давления газов на поршень, для станков – силы резания, для прессов – силы, возникающие при прессовании и т.д.
Определить приведенную силу Рпр для каждого положения механизма.
Рассчитать приведенный момент Мпр для каждого положения механизма.
Построить график приведенного момента от движущихся сил
 =Мпр(φ)
для механизмов двигателей и компрессоров.
Построить график приведенного момента
от сил полезных сопротивлений
=Мпр(φ)
для механизмов двигателей и компрессоров.
Построить график приведенного момента
от сил полезных сопротивлений  =Мпр.(φ)
для механизмов прессов, насосов и
станков.
=Мпр.(φ)
для механизмов прессов, насосов и
станков.Построить график работ от движущихся сил Адв.с.= А(φ) для механизмов двигателей и компрессоров. Построить график работ от сил полезных сопротивлений Ап.с.= А(φ) для механизмов прессов, насосов и станков.
Построить график работ от сил сопротивления Ас.с. и график приведенного момента от сил сопротивления
 для механизмов двигателей и компрессоров.
Построить график
работ движущихся сил Адв.с.
и график
приведенного момента от движущихся
сил
для механизмов двигателей и компрессоров.
Построить график
работ движущихся сил Адв.с.
и график
приведенного момента от движущихся
сил  =Мпр(φ)
для механизмов прессов, насосов и
станков.
=Мпр(φ)
для механизмов прессов, насосов и
станков.Построить график изменения кинетической энергии ΔТ = ΔТ(φ).
Построить график осевого приведенного момента инерции Јпр=Јпр(φ).
Построить график энергия-масса (диаграмму Ф. Виттенбауэра).
Определить момент инерции маховика Јмах.
Определить размеры маховика.
Рассмотрим построение схемы механизма и плана скоростей, т.е. выполним 1 и 2 пункты данного раздела.
4 Построение схемы механизма и планов скоростей
В основе четырехзвенных механизмов ДВС, компрессоров, прессов и пр. положен кривошипно-ползунный механизм. Поэтому его кинематический расчет идентичен для этих механизмов.
Исходные данные для расчета. Схема кривошипно-ползунного механизма (рисунок 4.1). Длина кривошипа ℓОА = 0,3 м, длина шатуна ℓАВ = 0,8 м, угловая скорость кривошипа ω1 = 30 с-1.
Определить. 1) Построить механизм в 6-и положениях, начиная с крайних в масштабе μℓ. 2) Построить для каждого положения план скоростей. 3) Определить скорость ползуна в каждом положении.
Примечание. За начало отсчета принять крайнее левое положение поршня В.
Решение. 1) Построение схемы механизма в шести положениях. Рассчитываем масштабный коэффициент длины
![]() ,
(4.1)
,
(4.1)
где отрезок ОА=30 мм (выбирается произвольно).
Примечание. Если чертеж выполняется на формате А1, то отрезок ОА принимается от 50 до 60 мм.
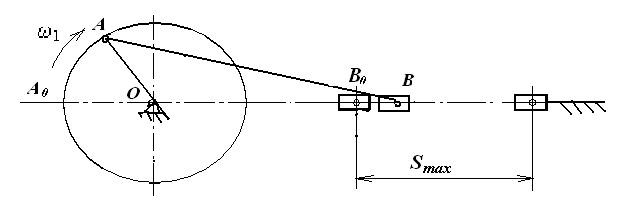
Рисунок 4.1 - Схема кривошипно-ползунного механизма
Тогда
![]() .
(4.2)
.
(4.2)
Определяем ход поршня Smax. Отмечаем точку А0 слева от точки О (согласно заданию). От нее вправо откладываем расстояние АВ=80 мм – отмечаем точку В0 (крайнее правое положение поршня). Делим окружность на 6 равных частей в сторону ω1. Отмечаем точки А1, А2…А5. От точки А3 откладываем расстояние АВ=80 мм также вправо. Отмечаем точку В3 – крайнее правое положение поршня. Отрезок [В0В3]=Smax – ход поршня В. Действительное значение хода определится
ℓSmax=[В0В3]·μℓ=60·0,01=0,6 м.
2) Построение планов скоростей. Планы скоростей строим для 6-и положений (рисунок 4.2, б). Скорость А точки А определиться по формуле
![]() ,
(4.3)
,
(4.3)
где ω1 – угловая скорость кривошипа, ℓОА - длина кривошипа (обе величины заданы).
Масштаб плана скоростей равен:
![]()
![]() ,
(4.4)
,
(4.4)
где
![]() - вектор скорости
- вектор скорости![]() ,
выбирается произвольно вмм.
,
выбирается произвольно вмм.
Построение плана скоростей рассмотрим для одного положения (для 1-го).
Выбираем в качестве полюса плана скоростей точку Р1 (рисунок 4.2, б) и откладываем от нее отрезок [Ра]= 50 мм перпендикулярно кривошипу ОА в сторону 1. Скорость точки В определим из построения векторных уравнений
![]()

![]() (4.5)
(4.5)
где
![]() - скорость
точки В
при вращении звена АВ
вокруг шарнира А,
вектор которой
- скорость
точки В
при вращении звена АВ
вокруг шарнира А,
вектор которой
![]() ;
;![]() - относительная
скорость точки В
в ее движении относительно точки В4,
вектор которой
- относительная
скорость точки В
в ее движении относительно точки В4,
вектор которой
![]() ||
х-х.
||
х-х.
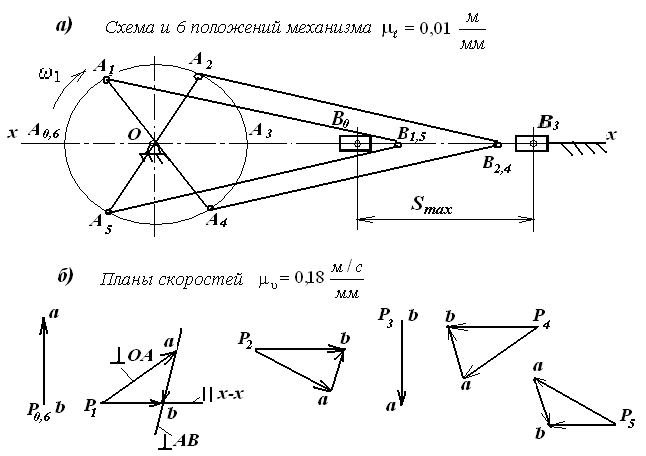
а – схема механизма; б – планы скоростей
Рисунок 4.2 – Построение схемы кривошипно-ползунного
механизма и его планов скоростей
Продолжаем
построение плана скоростей. Через точку
а
вектора
![]() проводим
прямую, перпендикулярную звену АВ
произвольной
длины,
а
из полюса Р
проводим
линию, параллельную оси х-х
также
произвольной длины.
На
пересечении получаем искомую точку
«b».
проводим
прямую, перпендикулярную звену АВ
произвольной
длины,
а
из полюса Р
проводим
линию, параллельную оси х-х
также
произвольной длины.
На
пересечении получаем искомую точку
«b».
Построение планов скоростей для положений 0, 3, 6 отличается тем, что эти положения являются «мертвыми». Поэтому точка «b» должна совпадать с полюсом Р (скорость ведомого звена равна нулю). План скоростей для этих положений будет изображаться в виде одного вектора (рисунок 4.2, б).
Для остальных положений построение планов скоростей ведется аналогично.
После построения планов рассчитываем действительные значения скоростей и угловых скоростей для каждого положения по формулам
υВ
=
µυ·[Рв]
= (м/с);
υВА
= µυ·
[ва]
= (м/с);
![]() .
(4.6)
.
(4.6)
Внимание: формулы (4.3)-(4.6) действительны для всех положений!
Расчетные данные заносим в таблицу 4.1.
Рассмотрим расчет скоростей для первого положения:
υВ = µυ·[Рв] = 0,18·52 = 9,36 м/с,
υВА = µυ· [ва] = 0,18·30 = 5,4 м/с,
где [Рв], [ва] - отрезки, замеренные с плана скоростей в мм.
Угловую скорость 2-го звена АВ определим по формуле:
![]()
Таблица 4.1 - Значения скоростей и угловых скоростей
|
Параметры |
0; 12 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
υB |
0 |
9,36 |
10,8 |
0 |
10,8 |
9,36 |
0 |
9,36 |
10,8 |
0 |
10,8 |
9,36 |
|
υBA |
9,0 |
5,4 |
8,1 |
9,0 |
8,1 |
5,4 |
9,0 |
5,4 |
8,1 |
9,0 |
8,1 |
5,4 |
|
|
11,25 |
6,75 |
10,125 |
11,25 |
10,125 |
6,75 |
11,25 |
6,75 |
10,125 |
11,25 |
10,125 |
6,75 |
Примечания. 1). В связи с тем, что кривошип совершает 2 оборота, то значения скоростей совпадают: для 7-го положения с 1-ым, для 8-го положения со 2-ым и т.д.
2). Для «мертвых» положений относительная скорость υBA =υA= 9 м/с; абсолютная скорость υB = 0.
3). Для четырехтактного двигателя ДВС расчет нужно вести для 12-и положений, т.к. кривошип совершает 2 оборота. Для остальных механизмов (двухтактного ДВС, прессов, компрессоров и пр.) расчет скоростей проводится для 6-и положений.
4) Если задано число оборотов кривошипа n1, то угловая скорость ω1 рассчитывается по формуле
![]() .
(4.7)
.
(4.7)
Рассмотрим расчет маховика для различных механизмов.