

5 Расчет маховика для четырехтактного двигателя внутреннего сгорания
Рабочий процесс двигателя внутреннего сгорания. Рабочий процесс двигателя представлен индикаторной диаграммой (рисунок 5.1). Индикаторная диаграмма (механическая характеристика) – график зависимости индикаторного давления ри от перемещения поршня S. В левом крайнем положении поршня начинается процесс горения топлива, поступающего в цилиндр в виде паров при всасывании. Образующие при горении топлива газы давят на поршень, перемещая его вправо. Происходит такт расширения (участок ab диаграммы). В положении поршня, близкого к правому крайнему положению, открывается выхлопной клапан. Отработанный газ, давление которого на 5-10 выше атмосферного, через открытый выхлопной клапан будет выходить в атмосферу. Происходит такт выхлопа (выталкивания) отработанных газов (участок bс диаграммы).

Рисунок 5.1 - Индикаторная диаграмма механизма
двигателя внутреннего сгорания
Исходные данные для расчета. Схема кривошипно-ползунного механизма с индикаторной диаграммой (рисунок 5.2). Длина кривошипа ℓОА = 0,3 м, длина шатуна ℓАВ = 0,8 м, угловая скорость кривошипа ω1 = 30 с-1, максимальное индикаторное давление рmax= 4,0 МПа, диаметр цилиндра d = 0,12 м, масса поршня m3= 15 кг, коэффициент неравномерности δ=0,05. Данные для построения индикаторной диаграммы взять из таблицы:
|
|
Сжатие |
Рабочий ход (расширение) | |||||||||||||||||||
|
S/Smax |
1,0 |
0,9 |
0,8 |
0,7 |
0,6 |
0,5 |
0,4 |
0,3 |
0,2 |
0,1 |
0,00 |
0,1 |
0,2 |
0,3 |
0.4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
p/pmax |
0,00 |
0,02 |
0,04 |
0,08 |
0,10 |
0,13 |
0,18 |
0,21 |
0,24 |
0,27 |
0,40 |
0,9 |
0,6 |
0,45 |
0,40 |
0,31 |
0,22 |
0,17 |
0,10 |
0,05 |
0,00 |
Примечание. 1). При выхлопе (выпуске) и всасывании (впуске) давление рi принимается равным атмосферному, т.е. рi = 98066,5 Па.
2). За начало отсчета принять крайнее левое положение поршня В.
3) Работу сил сопротивления Ас.с считать постоянной за весь цикл установившегося движения.
4) Если задано число оборотов кривошипа n1, то угловая скорость ω1 рассчитывается по формуле (4.7).
Определить. Момент инерции маховика Јмax (кг·м2), диаметр маховика Dмax (м).

Рисунок 5.2 – Схема механизма с индикаторной диаграммой
Решение. 1) Построение схемы механизма. Механизм строим в 6-и положениях, начиная с крайних (рисунок 4.1). Подробное описание построения представлено в п.4.
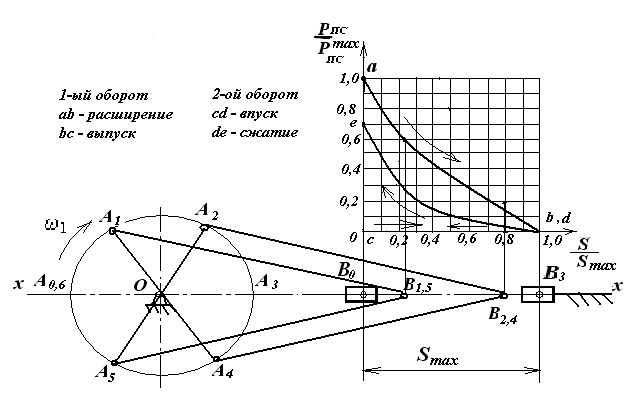
Рисунок 5.3 - К построению индикаторной диаграммы
четырехтактного ДВС
2) Построение индикаторной диаграммы проводится после определения хода поршня Smax (см. п.4). Параллельно ходу поршня проводится линия атмосферного давления, на которой отмечаются предельное расстояние Smax = [ВОВ3] (рисунок 5.3). Отрезок [ВОВ3] делится на 10 равных частей. Вертикально проводится ось линии максимального давления р/pmax, которая также делится на 10 равных частей. Отмечаются точки (согласно примеру по рисунку 5.2) - 0,1; 0,2; 0,3 и т.д. Затем строятся по исходным точкам кривые сжатия и расширения (см. таблицу по исходным данным).
3) Построение планов скоростей. Планы скоростей строим для 6-и положений (рисунок 4.1). Подробное описание построения представлено в п.4. Расчетные значения скоростей записываются в таблицу 4.1.
4) Расчет индикаторного (избыточного) давления ри. Давление на поршень называется индикаторным и вычисляется по формуле
![]() ,
(5.1)
,
(5.1)
где рmax – максимальное индикаторное давление (задано в МПа), yi – ордината, замеренная от линии атмосферного давления до линии соответствующего такта. Для положений 0, 1, 2 (такт расширения) ордината yi замеряется до линии abc. Для положений 9, 10, 11, 12 (такт сжатия) ордината yi замеряется до линии dfa (рисунок 5.3). При выхлопе и всасывании (линии ce и ed), когда поршень находится в положениях 3, 4, 5 и 6, 7, 8, давление ри принимается равным атмосферному, т.е. ри = 98066,5 Па.
Внимание! При расчете давление рmax необходимо перевести из МПа в Па. Например:
рmax = 3,6 МПа = 3,6 ·106 Па = 3600000 Па.
Рассмотрим расчет индикаторного давления для 1-го, 3-го и 10-го положений. 1-ое положение поршня соответствует такту расширения (рабочий ход). При этом ордината y1 будет совпадать с цифрой 0,6 на индикаторной диаграмме (рисунок 5.3). Тогда индикаторное давление в 1-ом положении будет равно
![]() .
.
3-е
положение поршня соответствует такту
выпуска. Согласно заданию при этом такте
давление нужно принимать равное
атмосферному. Поэтому
![]() .
.
10-ое положение поршня соответствует такту сжатия. Ордината y10 будет совпадать с цифрой 0,05 на индикаторной диаграмме. Тогда индикаторное давление в этом положении равно
![]() .
.
Рассчитываем давление ри для 12 положений. Расчеты сводим в таблицу 5.1.
5) Определение сил давления газа на поршень. Силой, действующей на поршень машины, является сила давления газа РГ, образующегося при сгорании топлива в камере сгорания. Сила давления газа определяться по формуле
![]() ,
(5.2)
,
(5.2)
где d – диаметр цилиндра в м (задан).
Рассчитаем силу газа для 3-х положений (для 1-го, 3-го и 10-го)
![]() ;
;
![]() ;
;
![]() .
.
Расчетные данные заносятся в таблицу 5.1.
Таблица 5.1 – Значения ординат уi, индикаторных давлений рi и сил давления газа на поршень РГ
|
Параметры |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Такты |
Расширение |
Выхлоп |
Всасывание |
Сжатие | |||||||||
|
уi |
1,0 |
0,6 |
0,2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0,05 |
0,3 |
0,7 |
|
ри, Па |
4000000 |
2400000 |
800000 |
98066,5 |
98066,5 |
98066,5 |
98066,5 |
98066,5 |
98066,5 |
98066,5 |
200000 |
1200000 |
2800000 |
|
РГ, Н |
45216,0 |
27129,6 |
9043,2 |
1108,5 |
1108,5 |
1108,5 |
1108,5 |
1108,5 |
1108,5 |
1108,5 |
2260,8 |
13564,8 |
31651,2 |
Примечание. При выхлопе и всасывании давление ри принимается равным атмосферному, т.е. ри = 98066,5 Па согласно заданию.
6) Определение приведенного момента. Приведенный момент вычисляется по формуле (1.3)
![]() .
.
К механизму приложена только одна сила (движущая поршень) – сила давления газа РГ. Поэтому формула (1.3) приведенного момента примет вид
![]() ,
(5.3)
,
(5.3)
здесь: сила РГ подставляется из таблицы 5.1, скорость υВ из таблицы 4.1, угловая скорость ω1 задана или рассчитана по формуле (4.7).
Примечание. При расчете приведенного момента Мпр по формуле (5.3) угол α (угол между линией действия силы РГ и вектором скорости υB) принять равным: для такта расширения α = 0о (работа при этом такте положительная и направления векторов РГ и υB совпадают), для тактов сжатия, выхлопа и всасывания α =180о (работа на этих тактах отрицательная).
Определяем Мпр для 12-и положений механизма. Расчетные данные занесем в таблицу 5.2.
Рассмотрим расчет приведенного момента Мпр для 3-х положений поршня (для 1-го, 3-го и 10-го).
![]() .
.
![]() .
.
![]() .
.
Таблица 5.2 – Значения приведенных моментов Мпр и их ординат h
|
Параметры |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Такты |
Расширение |
Выхлоп |
Всасывание |
Сжатие | |||||||||
|
Мпр, Нм |
0 |
+8464,4 |
+3255,5 |
0 |
-399,06 |
-345,852 |
0 |
-345,852 |
-399,06 |
0 |
-813,88 |
-4232,22 |
0 |
|
h, мм |
0 |
+106 |
+40,6 |
0 |
-4,98 |
-4,3 |
0 |
-4,3 |
-4,98 |
0 |
-10,17 |
-52 |
0 |
Примечание. В таблице отмечены отрицательные (-) и положительные (+)значения, что нужно учитывать при расчетах ординат и при построении графика.
7)
Построение
графика приведенного момента от
движущихся сил
![]() =Мпр(φ).
Перед
началом построения вычисляется масштабный
коэффициент графика по первому
(наибольшему) положению:
=Мпр(φ).
Перед
началом построения вычисляется масштабный
коэффициент графика по первому
(наибольшему) положению:
![]() ,
(5.4)
,
(5.4)
где h1 – произвольная ордината для первого положения в мм. Затем находятся остальные чертежные значения ординат в мм:
![]() и
т.д. (5.5)
и
т.д. (5.5)
Расчетные данные высот заносятся в таблицу 5.2.
Строится график приведенного момента в левом верхнем углу формата А1 (см. Приложение А). Строятся оси координат, причем вертикальная ось Мпр должна отстоять от края листа на 6080 мм (рисунок 5.4). Горизонтальная ось φ делится на 12(!) равных частей, т.к. кривошип совершает два оборота (длина оси φ выбирается следующих значений: 120, 180, 240 или 320 мм). На делительных линиях откладываются высоты: на линии 1 откладывается высота h1, на линии 2 – высота h2 и т.д. Если момент положительный, то ординаты откладываются вверх, если момент отрицательный, то ординаты откладываются вниз. Полученные точки соединяются плавной линией (рисунок 5.4).
8) Построение графика работ от движущихся сил Адв.с.= А(φ). График работы строится методом графического интегрирования. С левой стороны от оси Мпр откладывается полюсное расстояние Н, которое выбирается произвольно (от 40 до 60 мм). На участке [0-1] на оси φ отмечается середина и проводится вертикальная линия до пересечения с графиком приведенного момента (рисунок 5.3), затем горизонтальная с осью Мпр. Полученная точка 1 соединяется с полюсом Р. Линия 1-Р переносится параллельно на участок [0-1] на графике работ ([1-P][0-1]). Затем отмечается середина участка [1-2] на графике приведенного момента. Проводится вертикальная линия до пересечения с графиком, горизонтальная с осью и соединяется с полюсом Р. Линия [2-Р] параллельно переносится на график работы на участок [1-2] (рисунок 5.4). Остальные линии строим аналогично. Ломаная кривая есть график работ от движущихся сил Адв.с.
9)
Построение
графика
работ от полезных сил сопротивления
Ап.с.
и графика
приведенного момента от полезных сил
сопротивления
![]() .
Так как по условию задания работа сил
сопротивления величина постоянная, то
график Ап.с.
будет изображаться в виде прямой линии.
Для этого на графике работы Адв.с.
необходимо соединить точки 0
и 12´
прямой
(на рисунке 5.4 график Ап.с.
показан штриховой линией).
.
Так как по условию задания работа сил
сопротивления величина постоянная, то
график Ап.с.
будет изображаться в виде прямой линии.
Для этого на графике работы Адв.с.
необходимо соединить точки 0
и 12´
прямой
(на рисунке 5.4 график Ап.с.
показан штриховой линией).
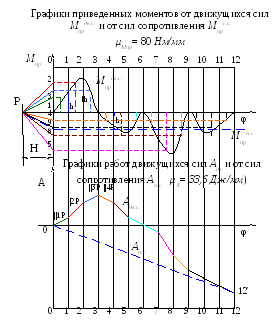
Рисунок 5.4 – Построение графиков приведенного момента
и графиков работ
График
приведенного момента от сил сопротивления
Мпрп.с
строится методом графического
дифференцирования. Он также будет
изображаться в виде прямой линии
(штриховая линия на рисунке 5.4). Для этого
параллельно отрезку [0-12´]
на графике работ проводится линия из
точки полюса Р
на графике приведенного момента до
соединения с осью Мпр.
Затем чертится горизонтальная линия,
которая и будет являться графиком
![]() .
.
10) Построение графика изменения (приращения) кинетической энергии ΔТ = ΔТ(φ). Изменение кинетической энергии есть разность работ
ΔТ = Адв.с.- Ап.с. (5.6)
Для построения графика необходимо вычесть алгебраически из ординат диаграммы Адв.с. ординаты диаграммы Ап.с. В результате получаются высоты h1, h2, h3 и т.д., которые откладываются на графике ΔТ. В итоге получается, что линия Ап.с. стала горизонтальной и совместилась с осью φ. Соединив высоты хордами, получим график изменения кинетической энергии ΔТ = ΔТ(φ) (рисунок 5.5).

Рисунок 5.5 - Построение графика изменения (приращения)
кинетической энергии ΔТ = ΔТ(φ)
11) Определение приведенного момента инерции Jпр. Вначале для каждого положения высчитывается осевой приведенный момент инерции по формуле (1.5)
 .
.
По условию задана масса только одного звена – поршня m3. Поэтому формула приведенного момента инерции примет вид
 (5.7)
(5.7)
где: скорость υВ подставляется из таблицы 4.1, угловая скорость ω1 – задана или рассчитана по формуле (4.7).
Расчетные значения записываются в таблицу 5.3.
Рассмотрим расчет Jпр для 3-х положений (0, 1, 10)

 .
.
Таблица 5.3 – Значения приведенных моментов инерции Jпр и их ординат h
|
Параметры |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Такты |
Расширение |
Выхлоп |
Всасывание |
Сжатие | |||||||||
|
Jпр, кгм2 |
0 |
1,46 |
1,944 |
0 |
1,944 |
1,46 |
0 |
1,46 |
1,944 |
0 |
1,944 |
1,46 |
0 |
|
h, мм |
0 |
75,2 |
100 |
0 |
100 |
75,2 |
0 |
75,2 |
100 |
0 |
100 |
75,2 |
0 |
12) Построение графика приведенного осевого момента инерции Јпр=Јпр(φ).
Рассчитывается масштабный коэффициент по первому или любому (наибольшему) положению:
![]() ,
(5.8)
,
(5.8)
где h2 – высота, выбранная произвольно. В данном примере масштаб рассчитан по 2-му положению, т.к. значение Jпр2 является наибольшим.
Чертежные значения ординат высчитываются по формулам:
![]() и т.д. (5.9)
и т.д. (5.9)
Вычисленные значения ординат записываются в таблицу 5.3.
График приведенного момента инерции Јпр строится под графиком изменения кинетической энергии ΔТ аналогично построению графика приведенного момента. Делим ось φ на 12 равных частей (длина оси φ выбирается следующих значений: 120, 180, 240 или 320 мм). На делительных линиях откладываем вычисленные значения высот h1, h2, h3 и т.д. Точки 1´, 2´, 3´ соединяем плавной линией. Получаем график осевого приведенного момента инерции (рисунок 5.6).
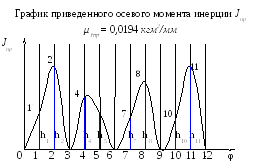
Рисунок 5.6 - Построение графика осевого приведенного момента инерции Јпр=Јпр(φ)
13) Построение графика энергия-масса (диаграмма Виттенбауэра). Для построения диаграммы энергия-масса необходимо исключить параметр φ из графиков ΔТ и Јпр. Для этого строим прямоугольную систему координат T=f(Jпр). Из начала координат проводим прямую под углом 45° к оси Jпр. Точки 1', 2', 3'... 12' диаграммы Jпр(φ) проецируем на эту прямую и далее до пересечения с прямыми, проведенными из точек 1*, 2*, 3* ... 12* диаграммы Т(φ). Соединяя точки пересечения 0, 1, 2 ... 12 плавной кривой, получим зависимость момента инерции от изменения кинетической энергии ΔТ= f(Јпр) - диаграмму Ф. Виттенбауэра (рисунок 5.7).
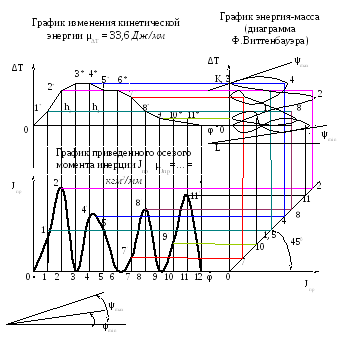
Рисунок 5.7 – Построение диаграммы Ф. Виттенбауэра
Полностью построение диаграммы Ф. Виттенбауэра (графика энергия-масса) для четырехтактного двигателя ДВС представлено в Приложении А.
14) Расчет масштабных коэффициентов построенных графиков. Масштабный коэффициент графика приведенного момента Мпр рассчитан по формуле (5.4), графика приведенного момента инерции Јпр рассчитан по формуле (5.8). Масштабный коэффициент графика работы рассчитывается по формуле:
μА = μМпр μφ Н = (Дж/мм), (5.10)
где Н – полюсное расстояние в мм (замеряется на графике приведенного момента Мпр – см. рисунок 5.4); μφ - масштабный коэффициент оси φ, который определяется по формуле:
![]() ,
(5.11)
,
(5.11)
где отрезок [012] - расстояние, замеренное по оси φ в мм.
Примечание. Значение (2π ·2) показывает, что кривошип совершает два оборота.
В нашем примере отрезок [012] = 120 мм, Н = 40 мм. Тогда
![]() ,
,
![]() .
.
Масштабный коэффициент графика ΔТ=f(φ) равен масштабному коэффициенту графика работы А=f(φ), т.е.:
μΔТ = μА = 336 Дж/мм. (5.12)
15) Определение момента инерции маховика Јмах. Момент инерции маховика определяется по формуле (3.1). Для его нахождения необходимо вычислить действительную величину ΔТmax, которая находится по формуле:
ΔТmax = [kℓ]μΔТ = (Дж). (5.13)
Чтобы определить отрезок [kℓ], необходимо вычислить углы ψmax и ψmin.
![]()
 ;
;
![]() ,
(5.14)
,
(5.14)
где: средняя угловая скорость вращения кривошипа ωср равна угловой скорости кривошипа (ωср = ω1), масштаб μΔТ = μА рассчитан по формуле (5.12), масштаб μЈпр определен по формуле (5.8), δ - заданный коэффициент неравномерности движения.
Примечание. Если углы ψmax и ψmin получились приближенными к 900, то из конструктивных соображений углы нужно выбрать в пределах от 30о до 60о.
Под этими углами проводим касательные к графику энергия-масса (касательная под углом ψmax должна коснуться верхней точки графика, а касательная под углом ψmin - нижней точки – см. рисунок 5.7). На вертикальной оси касательными отсекается отрезок [kℓ], который и подставляется в мм в формулу момента инерции маховика
![]() .
(5.15)
.
(5.15)
В нашем примере отрезок [kℓ] = 63 мм, тогда
![]() .
.
16) Определение размеров маховика.
Дисковый маховик (маховик со сплошным ободом). Его момент инерции относительно оси вращения, проходящей через центр масс, вычисляют по формуле
![]() (5.16)
(5.16)
где т - масса маховика, кг; q=b/Dмах - относительная ширина маховика (q=0,15...0,2); ρ - плотность материала: для стали - 7800 кг/м3, для чугуна - 7100 кг/м3.
Подставим в выражение (5.16) частные значения: р = 7800 кг/м3, q = 0,165, тогда формулы для определения наружного диаметра маховика и его массы будут иметь вид:
![]() ,
,
![]() .
(5.17)
.
(5.17)
Изображение дискового маховика представлено на рисунке 5.8, б.
Маховик со спицами. Момент инерции обода, принимаемого за полный цилиндр, определяется по формуле
![]() (5.18)
(5.18)
Из этого выражения можно найти наружный диаметр Dмах маховика и его массу m, задавшись диаметром d, например d = 0,7D. Для частных значений р = 7800 кг/м3, b = 0,15Dмах из выражения (5.18) наружный диаметр Dмах и масса т будут равны (рисунок 5.8, а):
![]() ,
,
![]() .
(5.19)
.
(5.19)
а) б)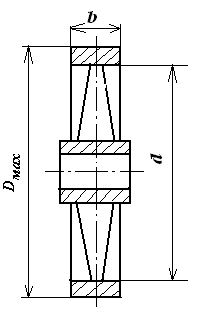
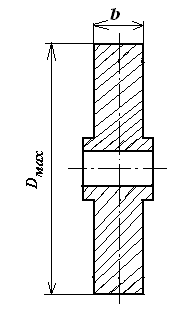
а – маховик со спицами; б – маховик со сплошным ободом
Рисунок 5.8 – Эскиз маховика
Выбираем дисковый стальной маховик. Рассчитаем его диаметр по формуле (5.17)
![]() .
.