

Основные механизмы управления движениями
Кибернетическая
схема структуры нервно-мышечной системы
представлена на рис. 41. Мышца состоит
из экстрафузальных сократительных
волокон, организованных в двигательные
единицы, каждая из которых возбуждается
одним спинномозговым мотонейроном
(а-мотонейроном). Мышечные волокна
прикрепляются к соответствующей
кости с помощью сухожилий, в которых
располагаются сухожильные рецепторы
Гольджи — механорецепторы или
проприоцепторы, реагирующие на суммарное
напряжение мышцы. Рецепторы Гольджи
служат датчиками сигнала тормозной
обратной связи. Проприоцептивную
функцию выполняет мышечное веретено,
состоящее из интрафузальных волокон с
сократимыми полярными частями.
Полярные части веретена сокращаются
под действием эфферентных импульсов
![]() -мотонейронов.
Сигналы первичных афферентов оказывают
возбуждающее влияние на а-мотонейроны,
образуя быстродействующую моносинаптическую
рефлекторную дугу, тогда как рецепторы
Гольджи оказывают дисинаптическое
тормозное воздействие на эти же
а-мотонейроны (см. схему).
-мотонейронов.
Сигналы первичных афферентов оказывают
возбуждающее влияние на а-мотонейроны,
образуя быстродействующую моносинаптическую
рефлекторную дугу, тогда как рецепторы
Гольджи оказывают дисинаптическое
тормозное воздействие на эти же
а-мотонейроны (см. схему).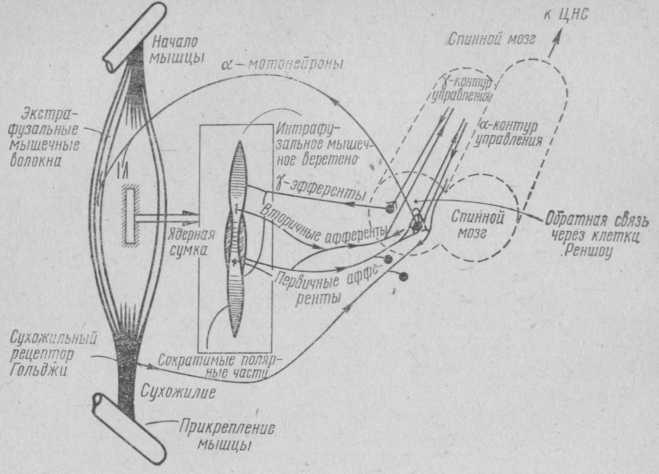
Рис. 41. Схематическая структура нервно-мышечной системы
Сигналы
вторичных афферентов веретена
распространяются более медленно и по
полисинаптическим связям. Кроме того,
в спинном мозгу имеются дополнительные
местные контуры обратной связи, образуемые
клетками Реншоу. Клетка Реншоу получает
возбуждающее действие через возвратную
коллатераль, ответвляющуюся от
аксона![]() -мотонейрона,
и в свою очередь оказывает воздействие
на клетки
-мотонейрона,
и в свою очередь оказывает воздействие
на клетки![]() -мотонейронного
пути данной мышцы. Эффект этой обратной
связи — тормозной.
-мотонейронного
пути данной мышцы. Эффект этой обратной
связи — тормозной.
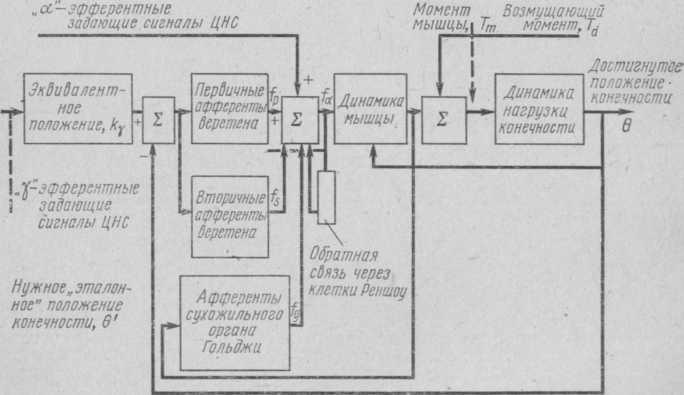
Функциональная схема нервно-мышечной системы
В
замкнутых системах управления движения
мышцы выполняют функцию основных
исполнительных устройств, при этом они
вместе с иннервирующими их нейронами
образуют особые следящие системы.
Выше приведена функциональная схема
(где![]() —
частота импульсации) нервно-мышечной
системы. Задающим сигналом
рассматриваемой системы может быть
один из сигналов центральной нервной
системы, поступающий по
—
частота импульсации) нервно-мышечной
системы. Задающим сигналом
рассматриваемой системы может быть
один из сигналов центральной нервной
системы, поступающий по![]() -
и
-
и![]() -эфферентным
путям, а тонкие
-эфферентным
путям, а тонкие![]() -волокна,
иннервирующие мышечные веретена, не
вызывают сокращения мышцы, но оказывают
постоянное тонизирующее влияние на
мышечные веретена.
-волокна,
иннервирующие мышечные веретена, не
вызывают сокращения мышцы, но оказывают
постоянное тонизирующее влияние на
мышечные веретена.
Основной
замкнутый контур, определяющий работу
системы, рефлекторную дугу, образуют
первичные афферентные волокна
веретен,![]() -мотонейроны
и мышечные волокна. В системе имеются
также и другие менее изученные замкнутые
контуры, проходящие через более высокие
уровни нервной системы.
-мотонейроны
и мышечные волокна. В системе имеются
также и другие менее изученные замкнутые
контуры, проходящие через более высокие
уровни нервной системы.
В понятиях биомеханики координация движений есть преодоление избыточных степеней свободы движущегося органа, иными словами, превращение последнего в управляемую систему. В соответствии с этой задачей и формируются основные механизмы управления движениями. Число степеней свободы взаимной подвижности звеньев кинематической цепи есть не что иное, как необходимое и достаточное число независимых друг от друга координат, которые должны быть назначены для того, чтобы поза органа оказалась вполне определенной. Так, для определения положения плеча относительно лопатки необходимо и достаточно назначить три координаты:
1) сгибание — разгибание;
2) приведение — отведение,
3)продольная ротация.
В каждом кинематическом звене задача преодоления ‘избыточных степеней свободы решается в основном по принципу сенсорных коррекций, осуществляемых совместно самыми различными системами афферентации и протекающих по типу рефлекторного кольца (рис. 42).
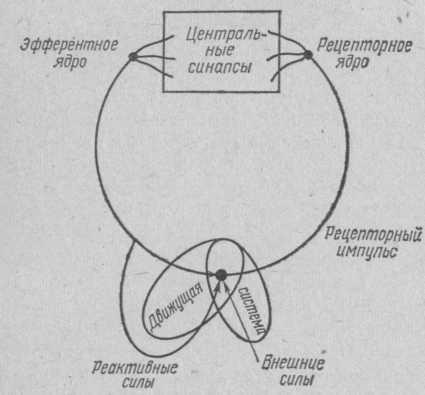
![]() эффекторы
эффекторы![]() рецепторы
рецепторы![]() центральная
нервная система или объект
центральная
нервная система или объект![]() рецепторы
рецепторы![]() центральная
нервная систему
центральная
нервная систему![]() эффекторы
эффекторы![]() объект.
Координация движения сводится к особой
группе физиологических механизмов,
создающих взаимодействие между
рецепторным и эффекторным процессами.
Следовательно, в основе координации
лежит замкнутая кольцевая система
рефлекторнойдеятельности.
Механизмы сенсорных коррекций на базе
рефлекторного кольца показаны на
схеме, приведенной выше.
объект.
Координация движения сводится к особой
группе физиологических механизмов,
создающих взаимодействие между
рецепторным и эффекторным процессами.
Следовательно, в основе координации
лежит замкнутая кольцевая система
рефлекторнойдеятельности.
Механизмы сенсорных коррекций на базе
рефлекторного кольца показаны на
схеме, приведенной выше.
Рис. 42. Схема проприоцептивного рефлекторного кольца
Почти при любом виде мышечной деятельности конечный процесс, определяющий, например, движение рукой, является «процессом управления». Структурная схема системы управления имеет при этом вид не замкнутого контура, а разомкнутой цепи. Процесс управления должен обеспечить некоторое определенное постоянное соотношение между входной величиной (направлением на цель) и выходной величиной (движением руки), т. е. он должен быть «заранее программирован». Экспериментальное исследование типичного процесса ориентации проведено на человеке и насекомых (богомоле) с использованием основных представлений теории регулирования и управления.
В каждом звене механизмов управления движениями исключительное значение имеют проприоцептивно-тактильные обратные связи. Часто двигательная реакция контролируется и экстероцептивным путем. Одним из примеров, демонстрирующих наличие обратных связей, может служить восприятие зрительных раздражений. Во время фиксации зрительного образа глаза непрерывно производят непроизвольные движения — тремор, дрейф и скачки. Вследствие этого изображения постоянно перемещаются на сетчатке глаза. При стабилизации изображения они быстро перестают быть видимыми.
Ни одно движение не обслуживается по всем его координационным деталям одним только ведущим уровнем управления. Процесс переключения технических компонентов движения в низовые фоновые уровни характеризует автоматизацию движения.