


ОСНОВНЫЕ ТЕОРЕМЫ СОСТАВНОГО ДВИЖЕНИЯ ТОЧКИ
Изобразим механизм в заданном положении (Рис. 10), при значении угла поворота ведущего звена OA — ϕk =65°, в выбранном масштабе длин — ML . Изображенный на рисунке механизм составлен из двух базо-
вых механизмов: шарнирного четырехзвенника OABO1 и кривошипно-
шатунного механизма O1CD , в каждом из которых шатуны AB и CD со-
вершают плоское движение, а кривошипы OA и O1C вращательное дви-
жение вокруг неподвижных осей Oz и O1z соответственно.
Определим, измерив в масштабе длины ML , положения узловых то-
чек базовых механизмов: |
|
|
OA =15 см, |
OM = 48 см, |
OB =102 см, |
O1C = 25 см, |
O1K =35.5 см, |
O1D = 68 см. |
Для определения скоростей и ускорений этих точек, а также угловых скоростей и ускорений звеньев представим плоское движение шатунов AB и CD в виде двух вращений.
В качестве переносного вращения примем:
для шатуна AB — вращение вместе с кривошипом OA вокруг неподвижной оси Oz с переносной угловой скоростью
ωABe =ω0 = π18 c−1 ;
для шатуна CD — вращение вместе с кривошипом O1C вокруг неподвиж-
ной оси O1z с неизвестной пока переносной угловой скоростью
ωCDe = ω2 .
Относительным вращением в этом случае является:
для шатуна AB — вращение звена вокруг подвижной оси Az с относи-
тельной угловой скоростью ωABr ;
42
для шатуна CD — вращение звена вокруг подвижной оси Cz с относи-
тельной угловой скоростью ωCDr ;
Определение скоростей точек и угловых скоростей звеньев с помощью теоремы осложениискоростейприпереносномвращательномдвижении
Так как закон движения кривошипа OA задан, а для шарнира B известна траектория движения, вычисление скоростей начинаем с точки B , вектор скорости которой, определим согласно теореме о сложении скоростей при составном движении:
|
|
|
|
vB = vBe + vBr |
|
(2.6) |
||||
где |
v |
|
e = ω |
e OB = ω OB =17.8 см |
с |
, |
vBe |
OB |
– переносная |
|
|
B |
AB |
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорость точки B , |
|
v |
B |
r = ω |
r OB =? , |
|
|
v |
r |
AB |
– относительная |
|
|
AB |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
скорость точки B , |
|
vB =?, |
|
|
|
vB O1B |
– абсолютная |
||||
|
|
|
|
|
|
|
|
|
|
скорость точки B . |
|
Направление переносной скорости |
vBe , определяется направлением |
||||||||
угловой переносной скорости и показано на Рис. 10. |
|
|||||||||
Решение уравнения (2.6) найдем графически, построив векторный треугольник скоростей (Рис. 10).
Для этого, из точки B проводим вектор переносной скорости — vBe .
Из конца вектора vBe проводим линию, перпендикулярную звену
AB , характеризующую возможное направление вектора относительной скорости vBr .
43
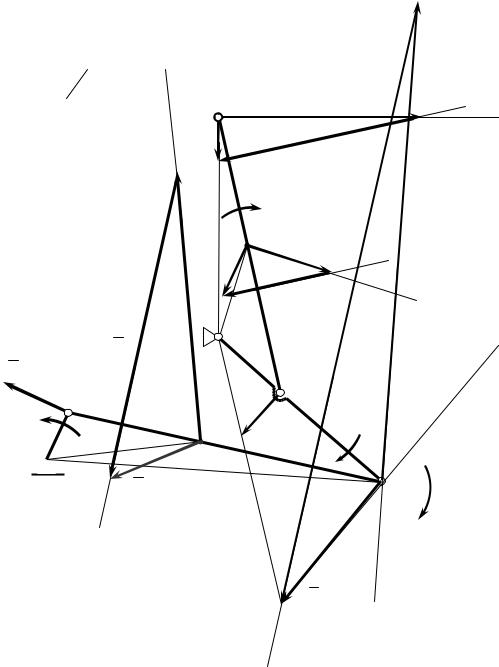
Из точки B проводим перпендикуляр к кривошипу O1B , который определяет возможное направление абсолютной скорости шарнира B , до пересечения с прямой, характеризующей направление вектора vBr .
ML =5 смсм
MV = 0.75 |
см |
с |
OM |
|
|||
см |
|
||
|
|
||
VM r
VA
A
O ω0
ω0
VM
AB
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
CD |
|
D |
|
|
|
|
|
|
|
V |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
O D |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D r |
|
|
|
|
|
|
|||||
|
|
D |
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
ω3 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
V e |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
K |
|
e |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
V |
K |
V |
CD |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K r |
|
|
O K |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O B |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
C |
ω2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|||||||||||||
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B ω1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
||||||||
VB OB
AB
Рис. 10 Определение скоростей точек механизма.
Точка пересечения данных прямых определяет концы неизвестных векторов относительной vBr и абсолютной vB скорости шарнира B
44

Измеряя указанные векторы, в соответствии с выбранным масштабом скоростей, получаем
v =5.4 см |
с |
, |
v r = 22.4 см |
с |
, |
ω |
r = vBr |
= 0.2306 c−1 |
B |
|
B |
|
AB |
AB |
|
||
|
|
|
|
|
|
Направление относительной угловой скорости шатуна AB , опреде-
ляемое направлением относительной скорости точки B — vBr , показано
на Рис. 10. Так как относительная ω |
r |
и переносная ω e угловые скоро- |
||||||
|
|
|
|
|
AB |
|
AB |
|
сти направлены в разные стороны, то абсолютная угловая скорость ωAB |
||||||||
звена AB равна |
|
|
|
|
|
|
|
|
ω |
=ω =ω |
e |
−ω |
r = −0.056 c−1 . |
||||
AB |
1 |
|
AB |
|
AB |
|
||
Знак “ −” у величины угловой скорости шатуна AB показывает, что ωAB |
||||||||
направлено по часовой стрелке. |
Мгновенный центр вращения звена AB |
|||||||
лежит на прямой OA и его положение определяется соотношением |
||||||||
OP ω |
e =(OA + AP) ω e = AP ω |
r . |
||||||
AB |
|
|
|
|
|
AB |
AB |
|
Разрешая данное уравнение относительно неизвестной AP , получим |
||||||||
|
AP = |
|
OA |
|
= 47 см. |
|
||
|
ω |
r |
−1 |
|
||||
|
|
|
|
|||||
|
|
|
AB |
e |
|
|
||
|
|
ω |
|
|
|
|
||
|
|
|
AB |
|
|
|
|
|
Величина AP определяет положение мгновенного центра вращения звена AB (МЦС) при заданном положении механизма.
Зная величину и направление относительной угловой скорости звена AB , скорость точки M найдем из уравнения
|
|
|
|
|
vM = vMe + vMr |
(2.7) |
||
где |
v |
M |
e = ω e OM =8.38 см |
с |
, |
v |
e OM |
– переносная скорость, |
|
|
AB |
|
|
M |
|
||
|
vMr = ωABr AM =9.68 смс , |
vMr AM |
– относительная скорость, |
|||||
45

vM =?, – абсолютная скорость.
Направление векторов переносной vMe и относительной vMr скоро-
стей точки M показано на Рис. 10. Решение уравнения (2.7) найдем, построив векторный треугольник скоростей. Измерением получено
|
vM |
=3.05 |
см |
с |
. |
||
|
|
|
|
|
|
|
|
Угловую скорость звена O1B найдем по формуле |
|||||||
ω = ω |
= |
vB |
|
= 0.0819 c−1 . |
|||
|
|||||||
2 |
O B |
|
O1B |
|
|
|
|
|
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
Скорости точек D и K , а также относительную и абсолютную угловые скорости звена CD найдем аналогично. Построив треугольники скоростей для этих точек (Рис. 10) и измеряя неизвестные векторы, получим
vDr =5.74 |
см |
с |
, |
vDe =5.59 см |
с |
, |
vD =1.31см |
с |
, |
|||
|
|
|
|
|
|
|
|
|
|
|||
ω |
r = |
0.0667 c−1 , |
|
|
|
|
|
|
||||
CD |
|
|
|
|
|
|
|
|
|
|
|
|
vK r = 2.58 |
см |
с |
, |
vKe =3.14 см |
с |
, |
vK =1.55 см |
с |
, |
|||
|
|
|
|
|
|
|
|
|
|
|||
ω =ω |
=ω |
|
e |
− ω |
r = −0.0152 c−1 |
|
|
|||||
3 |
CD |
CD |
|
CD |
|
|
|
|
|
|||
Знак “ −” у величины угловой скорости шатуна CD показывает, что ωCD
направлено по часовой стрелке. Мгновенный центр вращения звена CD лежит на прямой O1C и его положение определяется соотношением
O P ω e =CP ω |
|
r =(O C +O P) ω r . |
|||||
1 CD |
|
CD |
1 |
1 |
CD |
||
Разрешая данное уравнение относительно неизвестной O1P , получим |
|||||||
O P = |
O1C |
|
=109.7 см. |
|
|||
|
|
|
|||||
1 |
ω |
e |
−1 |
|
|
||
|
CD |
r |
|
|
|||
|
ω |
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
Величина O1P определяет положение мгновенного центра вращения звена CD (МЦС) при заданном положении механизма.
46

Определение ускорений точек и угловых ускорений звеньев с помощью теоремы осложенииускоренийприпереносномвращательномдвижении
Так как для шарнира B известна траектория движения, а закон движения кривошипа OA задан, вычисление ускорений начинаем с точки B . Абсолютное ускорение точки B определим согласно теореме о сложении ускорений при непоступательном переносном движении:
|
a |
= a |
e + a |
r + a c = a e Ц |
+ a |
e ВР + a |
r Ц |
+ a |
r ВР + a c |
(2.8) |
|||||||
|
|
B |
B |
B |
B |
|
|
B |
|
B |
|
B |
|
B |
B |
|
|
где aBe = aBe Ц + aBe ВР |
|
|
|
– переносное ускорение точки, |
|
||||||||||||
aBr = aBr Ц + aBr ВР |
|
|
|
– относительное ускорение точки, |
|
||||||||||||
a |
c = 2 ω |
e ×v |
r |
|
|
|
a c |
v |
r |
– ускорение Кориолиса, |
|
||||||
B |
|
AB |
B |
|
|
|
B |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
a c = |
2 ω |
e v |
r = 7.81 см |
с2 |
, |
|
|
|||||
|
|
|
|
|
B |
|
|
AB |
|
B |
|
|
|
|
|
|
|
aBe Ц =(ωABe )2 OB =3.10 см |
с |
2 |
aBe Ц ( )O &OB |
– переносное |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
центростремительное ускорение точки, |
|
|
|
|
|
||||||||||||
a |
e ВР =ε |
AB |
e OB = 0 , т.к. |
|
|
|
ω |
|
e |
= const |
|
|
– переносное |
|
|||
B |
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
|||
вращательное ускорение точки, |
|
|
|
|
|
|
|
|
|
||||||||
aBr Ц =(ωABr )2 AB =5.16 см |
с |
2 |
aBr Ц ( )A &AB |
– относительное |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центростремительное ускорение точки, |
|
|
|
|
|
||||||||||||
a |
r ВР =ε |
AB |
r AB =? |
|
|
|
|
a |
r ВР |
AB |
|
|
– относительное |
||||
B |
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
||
вращательное ускорение точки. |
|
|
|
|
|
|
|
|
|
||||||||
Направление ускорения Кориолиса |
a c , которое можно определить |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
по правилу векторного произведения векторов или методом Жуковского, показано на Рис. 11.
В уравнении (2.8) учтено, что переносное и относительное движения шатуна AB являются вращениями вокруг осей Oz и Az соответственно.
47

Поскольку абсолютное движение кривошипа O1B — вращение во-
круг оси O1z , то абсолютное ускорение точки B можно записать в виде
|
|
|
|
|
a |
B |
= a |
Ц + a ВР |
|
(2.9) |
|
|
|
|
|
|
|
|
B |
B |
|
|
|
где |
aBЦ = ω22 O1B =0.443 см |
2 |
|
aBЦ ( )O1 &O1B |
|
|
|||||
|
|
|
|
с |
|
|
|
|
|
|
|
|
– центростремительная составляющая абсолютного ускорения точки, |
||||||||||
|
a ВР =ε |
O B =? |
|
|
|
|
a ВР O B |
|
|
||
|
B |
2 1 |
|
|
|
|
B |
|
1 |
|
|
|
– вращательная составляющая абсолютного ускорения точки, |
|
|||||||||
|
Приравняем правые части уравнений (2.8), (2.9) и учтем коммута- |
||||||||||
тивность векторов. Получим |
|
|
|
|
|
|
|
||||
|
|
a Ц |
+ a |
ВР |
= a r Ц |
+ a |
e Ц + a c + a |
r ВР |
(2.10) |
||
|
|
B |
|
B |
|
|
B |
B |
B |
B |
|
|
Решение уравнения (2.10) найдем, построив векторный многоуголь- |
||||||||||
ник ускорений (Рис. 11). |
|
|
|
|
|
|
|
|
|||
|
Для этого, из точки B проводим параллельно звену AB вектор отно- |
||||||||||
сительного центростремительного ускорения — a r Ц . |
|
||||||||||
|
|
|
|
|
|
|
|
|
B |
|
|
|
Из конца вектора |
a |
r Ц |
проводим параллельно отрезку OB по на- |
|||||||
|
|
|
B |
|
|
|
|
|
|
|
|
правлению к точке O , вектор переносного центростремительного ускоре- |
|||||||||||
ния — a e Ц . |
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
Из конца вектора |
a |
e Ц |
откладываем вектор ускорения Кориолиса |
|||||||
|
|
|
B |
|
|
|
|
|
|
|
|
a c |
, из конца которого проводим линию AB , определяющую возможное |
||||||||||
B |
|
|
|
|
|
|
|
|
|
|
|
направление вектора a r ВР . |
|
|
|
|
|
|
|
|
|||
|
|
B |
|
|
|
|
|
|
|
|
|
|
Из точки В, в направлении прямой O B , откладываем вектор a Ц , а |
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
B |
из его конца линию, определяющую возможное направление вектора |
a ВР , |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
B |
которая проводится до пересечения с прямой, характеризующей направле-
ние вектора aBr ВР .
48
|
|
O B |
B |
r |
AB |
|
|
см |
Ц |
vB |
|||
|
1 |
aB |
|
|
||
MA =0.6 |
с2 |
|
|
|
aBr ВР |
AB |
см |
|
|
|
|||
|
|
|
|
|
||
|
|
|
C |
|
K |
|
a c |
D |
× |
|
B |
|
|
||
|
O1 |
|
|
|
|
M × |
|
|
|
|
|
|
|
|
a r Ц |
|
|
|
B |
εABr =ε1
|
|
|
|
смс2 |
A |
точка B |
− |
MA |
=0.4 |
O |
|
|
|
1 |
|
см |
|
|
|
|
|
|
|
|
|
B |
& O1B |
|
|
|
OB |
ω e =ω |
||||
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
AB |
0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
O B |
|
|
|
|
|
|
|
|
|
|
|
||
1 |
a |
Ц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
a ВР |
aB |
|
aBr ВР |
|
|
|
|
|
|
||||
|
|
|
a e Ц |
|
|
||||||||
B |
|
|
|
|
|
AB |
|
|
|||||
|
|
|
a r Ц |
|
B |
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
B |
|
|
a c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
ε |
AB |
r |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
|
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
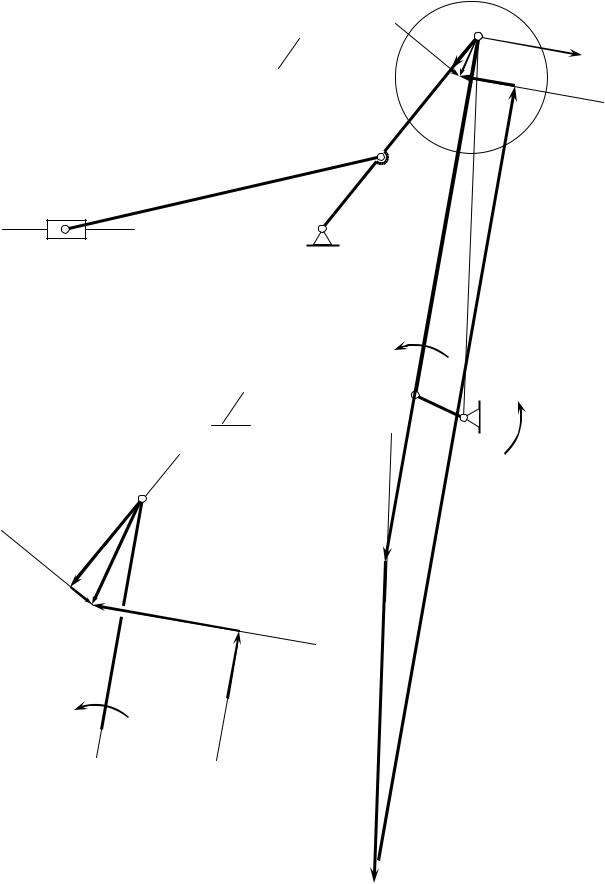
Рис. 11 Определение ускорений точки B .
49

см
MA1 =0.4 смс2
B |
& O1B |
|
|
|
|
|
O B |
|
|
|
|
aB |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Ц |
a r Ц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
AB |
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aB |
|
|
|
|||
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
a r ВР |
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
aBc |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
D |
× |
|
|
aС |
|
|
|
a B |
|
|
|
|
|
|||
|
O |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
v r AB |
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
M × |
|
||||||
|
|
|
1 |
|
|
|
|
|
|
M |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
AB |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
ε2 |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aM r ВР |
AB |
|||
|
|
|
|
ε |
AB |
r = ε |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
c |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|||
|
|
|
A |
|
|
|
|
|
|
|
смс2 |
|
|
O |
|
|
|
MA |
=0.25 |
a |
r Ц |
ω |
|
e = ω |
|
|
|
|
см |
|
AB |
|
0 |
||
|
|
|
|
|
|
|
||
|
|
|
M |
|
|
|
|
|
|
|
|
OB |
|
|
|
|
|
aM e Ц
Рис. 12 Определение ускорений точек M и C
50

|
|
|
|
|
|
|
O1D |
aDe ВР |
|
|
|
|
|
|
|
MA =0.05 |
смс2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
см |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
D |
|
|
|
|
|
|
c |
aDr Ц |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
ε2 |
= εCD |
aD |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
& O1D |
|
|
||||||
|
|
|
|
|
|
|
e |
|
|
|
|
|
|||||
|
|
|
|
aK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
aK c |
×K |
ε r |
|
|
aDr ВР |
|
|
CD |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aD |
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aK e Ц |
|
|
|
& CD |
|
|
|
|
|
|
|
||||||
|
|
|
|
O1 |
|
|
|
vDr СD |
|
|
|
D |
εCD r |
|
|||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
e Ц |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
O K |
|
|
|
|
D |
|
|
|
|
||||||||
|
C |
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& O1K |
|
|
|
|
|
|
|
|
vKr |
|
|
||||||
aK e ВР |
|
|
|
|
|
|
|
|
K |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
a |
r Ц |
|
|
|
|
|
|
|
|
|
ε3 |
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a r ВР |
|
|
|
|
|
|
|
|
|
|
|
|
CD |
K |
|
|
|
|
|
|
O1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
& CD |
ωCDe = ω2 |
|
C |
A |
ε2 = εCDe |
O |
M× |
& O D |
& |
CD |
aС |
a B |
|
B |
|||
1 |
|
|
|
|
Рис. 13 Определение ускорений точек D и K
В точке пересечения этих прямых сходятся концы векторов aBr ВР , aBВР и aB . Измеряя данные векторы в масштабе ускорений, получим
51

a |
r ВР |
=0.597 см |
с2 |
, a |
ВР |
= 0.06 см |
с2 |
, a |
= 0.45 |
см |
. |
||||||||||||
B |
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
B |
|
|
с2 |
|
||||
Угловые ускорения звеньев определяем по формулам |
|
||||||||||||||||||||||
|
|
|
ε |
|
|
r |
= ε = |
|
a |
r ВР |
= 0.0063 с |
−2 |
, |
|
|
|
|||||||
|
|
|
AB |
|
|
B |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 |
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
εO B = ε2 = |
|
a |
ВР |
= |
0.0009 с |
−2 |
|
|
|
|
||||||||||
|
|
|
|
B |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
O1B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Направления угловых ускорений, которые определяем по направле- |
|||||||||||||||||||||||
нию векторов |
a |
r ВР и a ВР |
|
соответственно, показаны на Рис. 11. |
|||||||||||||||||||
|
B |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полное ускорение точки C звена O1B, совершающего вращательное |
|||||||||||||||||||||||
движение, определим из соотношения |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
aB = |
O1B |
, тогда a |
= a |
|
O1C |
= 0.172 см |
. |
|
|||||||||||||
|
|
aC |
O1C |
|
|
|
|
|
|
C |
|
|
B O1B |
|
|
|
|
|
с2 |
|
|
||
Изображаем вектор aС параллельно вектору aB в масштабе ускоре- |
|||||||||||||||||||||||
ний на Рис. 12. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как угловое относительное ускорение шатуна AB определено, |
|||||||||||||||||||||||
найдем ускорение точки M . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
a = a |
|
e Ц + a |
e ВР + a |
r Ц + a |
r ВР |
+ a c |
|
|
|||||||||||||
|
|
M |
|
M |
|
|
M |
|
|
|
|
M |
M |
|
|
M |
|
|
|
||||
где aMe Ц =(ωABe )2 OM =1.46 |
см |
|
2 |
aMe Ц ( )O &OM |
– переносное |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центростремительное ускорение точки, |
|
|
|
|
|
|
|
|
|||||||||||||||
a e ВР =ε |
e |
OM = 0 т.к. |
|
|
|
|
ω |
|
e = const |
|
|
– переносное |
|||||||||||
M |
AB |
|
|
|
|
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
|
|
||
вращательное ускорение точки, |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
aMr Ц =(ωABr )2 AM = 2.23 |
см |
|
2 |
aMr Ц ( )A &AB |
– относительное |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центростремительное ускорение точки, |
|
|
|
|
|
|
|
|
|||||||||||||||
aMr ВР = εABr AM = 0.26 см |
с |
2 |
|
|
a |
|
r ВР AB |
|
|
|
– относительное |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|||
вращательное ускорение точки.
52
aMc = 2 ωABe ×vMr aBc vBr |
|
– ускорение Кориолиса: |
|||
a c = 2 ω |
e v |
r =3.38 |
см |
||
M |
AB |
|
M |
|
с2 |
aM =? |
|
– абсолютное ускорение точки |
|||
Изображаем многоугольник ускорений для точки M (Рис. 12). Изме- |
|||||
ряя неизвестный вектор ускорения aM , получим |
|
||||
a |
= 0.31 см |
. |
|
||
M |
|
|
с2 |
|
|
Для определения ускорения точки D примем в качестве переносного движения вращение вместе с кривошипом O1C . В этом случае имеем
|
|
|
a = a e Ц |
+ a |
e ВР |
+ a |
|
r Ц + a |
r ВР |
+ a c |
|
||||||
|
|
|
D |
D |
|
D |
|
|
|
|
D |
D |
D |
|
|||
где aDe Ц =(ωCDe )2 O1D =0.458 |
см |
|
2 |
aDe Ц ( )O1 &O1D |
– переносное |
||||||||||||
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
центростремительное ускорение точки, ω |
e = ω , |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
2 |
|
|
a |
e ВР =ε |
CD |
e O D = 0.062 см |
с |
2 |
|
|
a |
e ВР |
O D |
|
– переносное |
|||||
D |
|
1 |
|
|
|
|
D |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
вращательное ускорение точки, εCDe =ε2 , |
|
|
|
||||||||||||||
aDr Ц =(ωCDr )2 CD =0.383 см |
2 |
|
aDr Ц ( )C &CD |
– относительное |
|||||||||||||
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
центростремительное ускорение точки, |
|
|
|
||||||||||||||
a |
r ВР =ε |
CD |
r CD =? |
|
|
|
|
|
|
a |
r ВР |
CD |
|
– относительное |
|||
D |
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
вращательное ускорение точки. |
|
|
|
|
|
|
|
|
|||||||||
aDc = 2 ωCDe ×vDr |
aDc vDr |
|
|
– ускорение Кориолиса |
|||||||||||||
|
|
|
|
a c |
= 2 ω |
|
e v |
|
|
r = 0.940 см |
|
||||||
|
|
|
|
D |
|
|
|
CD |
|
D |
|
|
с2 |
|
|||
aD =? |
|
aD &O1y |
|
|
|
|
|
– абсолютное ускорение точки |
|||||||||
Аналогично способу, изложенному ранее, изображаем многоуголь- |
|||||||||||||||||
ник ускорений для точки D |
(Рис. 13). Измеряя неизвестные векторы, по- |
||||||||||||||||
лучаем значения ускорений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
53

aDr ВР =0.067 смс2 ; aD = 0.105 смс2 .
Затем вычисляем угловое относительное ускорение звена CD
a r ВР
εCDr = CDD
Направление относительного углового ускорения определяем по направ-
лению вектора aDr ВР и изображаем его на Рис. 13 по часовой стрелке.
Так как относительное и переносное угловые ускорения шатуна CD направлены в одну сторону, направление абсолютного углового ускорения звена совпадает с переносным или относительным угловым ускорением, а его величина равна
εCD =ε3 = εCDe +εCDr = 0.00168 c−2
Ускорение точки K найдем аналогично определению ускорения точки M . Построив многоугольник ускорений для этой точки (Рис. 13)
|
|
|
|
a = a e Ц + a |
e ВР |
+ a |
r Ц + a |
r ВР + a c |
||||||
|
|
|
|
K K |
|
K |
|
|
|
K |
K |
K |
||
где aKe Ц =(ωCDe )2 O1K = 0.212 |
см |
с |
2 |
|
aKe Ц ( )O1 &O1K |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
a |
e ВР = ε |
CD |
e O K = 0.029 см |
|
2 |
|
|
|
|
a |
e ВР |
O K |
||
K |
|
|
1 |
с |
|
|
|
|
K |
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|||
aK r Ц =(ωCDr )2 CK =0.209 см |
|
2 |
|
|
aK r Ц ( )C &CD |
|||||||||
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
aK r ВР = εCDr CK = 0.037 см |
|
2 |
|
|
|
|
|
a |
r ВР |
CD |
||||
|
|
|
|
с |
|
|
|
|
|
|
|
K |
|
|
a |
c = 2 ω |
e v |
r = 0.514 см |
с2 |
|
|
|
|
|
aDc vDr |
||||
K |
|
CD |
K |
|
|
|
|
|
|
|
|
|||
aK =? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерением получим |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
a |
|
= 0.116 |
см |
|
|
|||||
|
|
|
|
K |
|
|
|
|
|
|
с2 |
|
||
54