


Определение ускорений точек и угловых ускорений звеньев с помощью теоремы о сложении ускорений
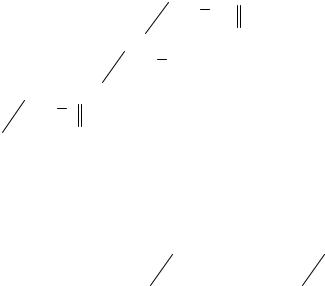
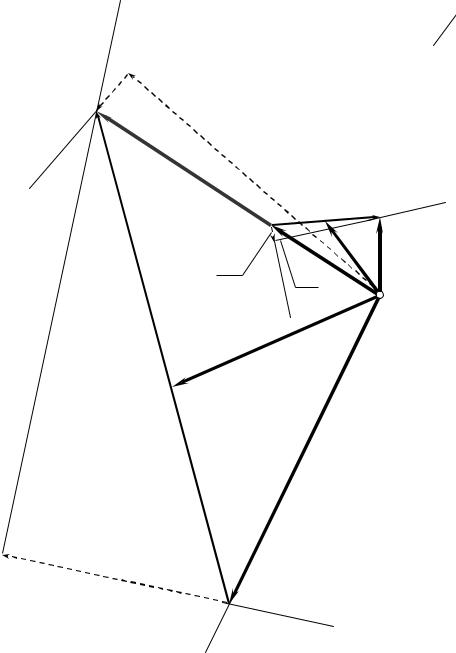
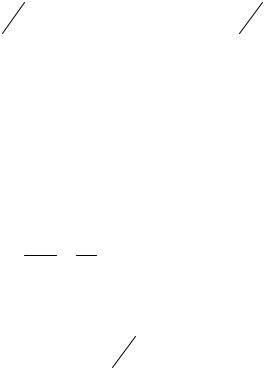
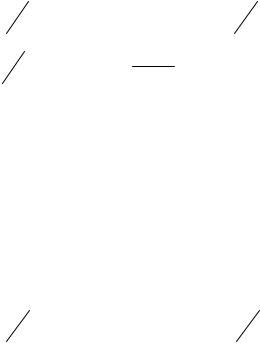
Ускорения точек и угловые ускорения звеньев, совершающих плоскопараллельное движение, будем определять с использованием теоремы о сложениях ускорений в плоском движении. Данную теорему реализуем графически, в виде отдельных многоугольников ускорений на схеме механизма (Рис. 8) и с помощью плана ускорений (Рис. 9), построенных в масштабе ускорений MA .
Вращение ведущего звена OA является равномерным с угловой ско-
ростью ω0 = π/18 c−1 , поэтому полное ускорение точки A равно ее центро-
стремительной составляющей
a |
= a |
Ц , |
a |
Ц =ω 2 |
OA = |
|
π 2 |
15 = 0.4569 см |
|
2 , |
a |
Ц →( )О (2.3) |
A |
|
A |
A |
0 |
|
|
|
|
с |
|
|
A |
|
|
|
|
|
|
|
18 |
|
|
|
|
Определение ускорений начинаем с точки B , траектория которой из-
вестна. Взяв за полюс точку A , применим, с учетом (2.3), теорему о сложении ускорений к точке B звена AB :
где aBA
aBAЦ
aBAВР
a = a |
A |
+ a |
BA |
= a |
Ц + a |
Ц + a |
ВР |
(2.4) |
B |
|
|
A |
BA |
BA |
|
—ускорение точки B при вращательном движении звена AB вокруг полюса A .
—центростремительное ускорение точки B при вращательном движении звена AB вокруг полюса A .
—вращательное ускорение точки B при вращательном движении звена AB вокруг полюса A .
34

|
aC |
aDCВР |
CD |
|
|
||
a DЦС |
|
aD |
|
|
|
D
&CD
AB |
ε3 |
aВЦ
|
b |
|
aВВР |
|
O B |
a |
B |
aC |
O1 |
1 |
|
c |
см
MA = 0.05 смс2
|
A |
C |
|
ω0 |
ε2 |
||
|
O |
ε1 |
B |
|
||
|
|
|
|
aВАВР |
|
aA |
a ВАЦ |
|
aA
&AB
&OA
Рис. 8 Определение ускорений.
35

Для точки B звена O1B имеем |
|
|
|||
|
a |
B |
= a |
Ц + a ВР |
(2.5) |
|
|
B |
B |
|
|
где a Ц |
— центростремительное ускорение точки B при вращательном |
||||
B |
|
|
|
|
|
|
движении звена O1B . |
|
|
|
|
aBВР |
— вращательное ускорение точки B при вращательном движе- |
||||
|
нии звена O1B . |
|
|
|
|
Приравнивая (2.4) и (2.5), получим векторное уравнение, которое решаем графически с учетом выбранного масштаба ускорений (Рис. 8):
|
|
|
|
|
|
|
a |
Ц + a |
ВР = a |
Ц + a |
Ц |
+ a |
ВР |
|
|||||
|
|
|
|
|
|
|
B |
B |
|
|
|
A |
|
BA |
|
BA |
|
||
Здесь |
a |
BA |
Ц = ω |
|
2 |
AB = 0.3151 |
см |
с |
2 |
, |
a |
Ц |
AB →( )A |
||||||
|
|
AB |
|
|
|
|
|
BA |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
ВР = ε |
|
|
AB =? см |
|
, a |
|
|
ВР AB |
|
|
|
|||||
|
|
BA |
|
|
AB |
|
с2 |
|
BA |
|
|
|
|
|
|||||
|
a |
Ц = ω |
|
2 |
O B = 0.4255 |
см |
с |
2 |
, |
a |
Ц O B → |
( )O |
|||||||
|
|
B |
O B |
|
1 |
|
|
|
|
B |
|
1 |
|
1 |
|||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
a |
ВР = ε |
O B |
O B =? см |
2 |
, a |
|
ВР O B |
|
|
|
||||||||
|
|
B |
|
|
1 |
с |
|
|
B |
|
|
1 |
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Построив в точке B механизма замкнутый многоугольник ускорений на Рис. 8 в масштабе ускорений, измеряем значения неизвестных векторов:
aBВР = 0,0620 смс2 ; aBAВР =0.6078 смс2 ; aB =0.4502 смс2 .
Построение многоугольника ускорений проводим следующим образом:
Из точки B проводим, в масштабе ускорений, вектор ускорения полюса aA = aAЦ .
Из конца вектора aAЦ откладываем параллельно BA вектор ускоре-
ния aBAЦ , из конца которого проводим линию AB , определяющую воз-
можное направление вектора aBAВР .
36

Из точки В, в направлении прямой BO , откладываем вектор a |
Ц , а |
|||||||||
|
|
|
|
|
|
|
|
1 |
|
B |
из его конца линию перпендикулярную O1B, определяющую возможное |
||||||||||
направление вектора a ВР . |
|
|
|
|
|
|
|
|
||
B |
|
|
|
|
|
|
|
|
|
|
Данная линия проводится до пересечения с прямой, перпендикуляр- |
||||||||||
ной AB , характеризующей направление вектора a |
ВР . |
|
||||||||
|
|
|
|
|
|
|
|
BA |
|
|
Точка “b” пересечения этих прямых является точкой, в которой схо- |
||||||||||
дятся концы векторов a |
|
ВР |
, a ВР |
и a . |
|
|
|
|||
|
BA |
B |
|
|
B |
|
|
|
||
Угловые ускорения звеньев определяем по формулам |
|
|||||||||
|
ε |
|
= ε = |
a |
ВР |
= 0.063 с−2 , |
|
|
||
|
AB |
|
BA |
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
|
1 |
|
AB |
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
εO B |
=ε2 = |
|
a ВР |
= 0.0009 с−2 |
|
|
|||
|
|
B |
|
|
|
|
||||
|
|
O1B |
|
|
||||||
|
|
1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Направления угловых ускорений, которые определяем по направле-
нию векторов aBAВР и aBВР соответственно, показаны на Рис. 8.
Полное ускорение точки C звена O1B, совершающего вращательное движение, определим по формуле
aC = aCЦ + aCВР
Здесь |
a |
Ц = ω |
2 |
O C =0.1612 см |
с2 |
, |
a Ц |
O B →( )O , |
|
|
|
|
|||||
C |
O1B |
1 |
|
|
|
C |
1 |
|
1 |
|
|
|
|
||||
|
a |
ВР = ε |
O B |
O C = 0.0225 см |
с |
2 |
, |
a ВР O B , |
|
|
|
|
|||||
|
C |
|
1 |
|
|
|
C |
1 |
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= O C |
ω 4 |
+ ε |
2 = 0.1724 |
см |
, γ |
|
|
ε |
O1B |
|
=8° |
||||
|
2 |
=arctg |
ω |
|
|||||||||||||
|
C |
1 |
|
O1B |
|
O1B |
|
|
|
с2 |
|
|
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O1B |
|
|
|
Изображаем вектор aC в масштабе ускорений MA на Рис. 8.
Ускорение точки D звена CD определим с использованием теоремы о сложении ускорений, приняв точку C за полюс
37
|
|
|
|
|
|
a = a + a = a Ц |
|
+ a |
ВР + a |
Ц + a ВР |
|
|||||||||||
|
|
|
|
|
|
|
D |
C |
DC |
|
|
C |
|
|
|
|
C |
|
|
DC |
DC |
|
Здесь |
a |
DC |
Ц = ω |
|
2 |
CD = 0.0196 см |
с |
2 |
, a |
|
Ц CD →( )C, |
|||||||||||
|
CD |
|
|
|
|
|
|
|
|
|
|
DC |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
ВР =ε |
|
|
CD =? |
см |
, |
|
a |
|
|
|
ВР CD , |
|
|
|
|||||
|
|
DC |
|
CD |
|
|
|
с2 |
|
|
DC |
|
|
|
|
|
|
|
||||
|
a |
=? см |
с2 |
, |
a |
|
Oy . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
D |
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналогично способу, изложенному ранее, изображаем многоуголь- |
|||||||||||||||||||||
ник ускорений для точки D (Рис. 8). Измеряя неизвестные векторы, полу- |
||||||||||||||||||||||
чаем значения ускорений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
a |
ВР |
= 0.1433 см |
|
|
|
; a |
|
= 0.1018 |
см |
. |
|||||||
|
|
|
|
|
|
DC |
|
|
|
|
с2 |
|
|
D |
|
|
с2 |
|
||||
|
Затем вычисляем угловое ускорение звена CD |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
a |
|
ВР |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
εCD = ε3 |
= |
|
DC |
|
|
|
= 0.0017 с−2 |
, |
|
|||||
|
|
|
|
|
|
|
|
CD |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
и изображаем его направление на Рис. 8.
Для определения ускорений точек M и K строим план ускорений
(Рис. 9).
Построение плана ускорений проводим следующим образом:
Из произвольной точки O проводим, в масштабе ускорений MA , от-
резок oa , определяющий модуль и направление вектора ускорения полюса aA = aA Ц . Из конца вектора aAЦ откладываем вектор ускорения aBAЦ , из конца которого проводим линию AB , определяющую возможное на-
правление вектора aBAВР .
Из точки O , в направлении прямой O1B , откладываем вектор aBЦ , а
из его конца линию, определяющую возможное направление вектора aBВР .
Данная линия проводится до пересечения с прямой, перпендикуляр-
ной AB , характеризующей направление вектора aBAВР .
38
|
|
AB |
|
|
|
см |
|
|
|
MA |
= 0.05 |
с2 |
|
|
|
aВЦ |
см |
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
b |
aВВР |
|
|
|
|
|
aB |
|
|
|
|
|
|
|
|
|
|
|
|
O B |
|
aBA |
|
|
|
|
1 |
|
|
|
|
CD |
|
|
|
aC |
k aDC |
d |
||
aВАВР |
|
c |
aК |
|
aD |
|
|
a Ц |
|
|
|
||
|
|
aDCВР |
|
|
|
|
|
|
DС |
|
o |
|
|
|
|
&CD |
|
|
|
|
aМ
m
aВАЦ |
aA |
|
|
a |
&AB |
&OA |
|
Рис. 9 План ускорений.
Точка пересечения этих прямых “ b ” является точкой, в которой схо-
дятся концы векторов aBA и aB . Отрезок ob определяет модуль и направление вектора ускорения точки B .
Для нахождения ускорения точки M звена AB разделим отрезок ab точкой “ m ” в соотношении
39
|
|
|
am |
= |
AM |
= |
aMA |
. |
|
|
|
|
|||
|
|
|
ab |
AB |
|
|
|
|
|
||||||
|
|
|
|
|
|
a |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
BA |
|
|
|
|
|
Измеряя длины отрезков am и om , вычисляем, с использованием |
|||||||||||||||
масштаба ускорений, ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|||
a |
= M |
|
am = 0,2923 см |
|
, |
|
a |
= M |
|
om = 0,3029 |
см |
. |
|||
MA |
|
A |
|
с2 |
|
|
M |
|
|
A |
|
с2 |
|
||
Треугольник oam на плане ускорений определяет теорему о сложе- |
|||||||||||||||
нии ускорений для точки M |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
a = a |
Ц + a |
|
Ц |
+ a |
|
ВР |
|
|
||||
|
|
|
M |
A |
|
|
MA |
|
MA |
|
|
|
|||
Ускорение точки C определим, разделив отрезок ob на плане ускорений в соотношении
oc = O1C = aC . ob O1B aB
Измеряя длину отрезка oc , получим
aC = MA oc =0,1667 смс2 .
Для нахождения ускорения точки D проведем из точки C отрезок,
задающий, в масштабе ускорений, модуль и направление вектора aDCЦ , а
из его конца линию, определяющую направление ускорения aDCВР .
Поскольку траектория ползуна D — прямая параллельная оси Oy ,
ускорение точки D направлено вдоль траектории. Из точки O плана ускорений проводим линию, характеризующую направление ускорения ползуна D .
Точка “d ”, полученная в результате пересечения проведенных линий определяет концы векторов ускорений aD , aDCВР и aDC . Измеряя в масшта-
бе ускорений, получим:
40
a |
= M |
|
cd = 0,1387 |
см |
|
|
, |
a |
= M |
|
od = 0,1008 |
см |
|
, |
||||||
DC |
|
A |
|
с2 |
|
|
D |
|
|
|
A |
|
|
|
с2 |
|
||||
a |
ВР |
|
= 0,1373 |
см |
|
, |
ε |
|
|
=ε |
|
|
a |
ВР |
= 0.0016 c |
−2 |
||||
|
|
|
|
|
|
= DC |
|
|
|
|||||||||||
DC |
|
|
|
с2 |
|
|
|
DC |
|
|
3 |
|
CD |
|
|
|
|
|||
Ускорение точки K получим по аналогии с определением ускорения |
||||||||||||||||||||
точки M звена AB . Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ck = |
CK |
= |
aKC |
. |
|
|
|
|
|
|
|
||||||
|
|
|
CD |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
cd |
|
|
a |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
DC |
|
|
|
|
|
|
|
|
|
Измеряя длины отрезков ck и ok , вычисляем, с использованием |
||||||||||||||||||||
масштаба ускорений, ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
a |
= M |
|
ck = 0,0758 см |
|
|
, |
a |
= M |
|
ok = 0,1167 |
см |
|
. |
|||||||
KC |
|
A |
|
с2 |
|
|
K |
|
|
|
A |
|
|
|
с2 |
|
||||
41