


2. ГЕОМЕТРИЧЕСКИЕ МЕТОДЫ
Расчет скоростей и ускорений точек и звеньев многозвенного шарнирного механизма будем проводить двумя методами:
•с помощью основных теорем кинематики плоского движения твердого тела;
•с помощью основных теорем кинематики составного движения точки при переносном вращательном движении.
ОСНОВНЫЕ ТЕОРЕМЫ ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
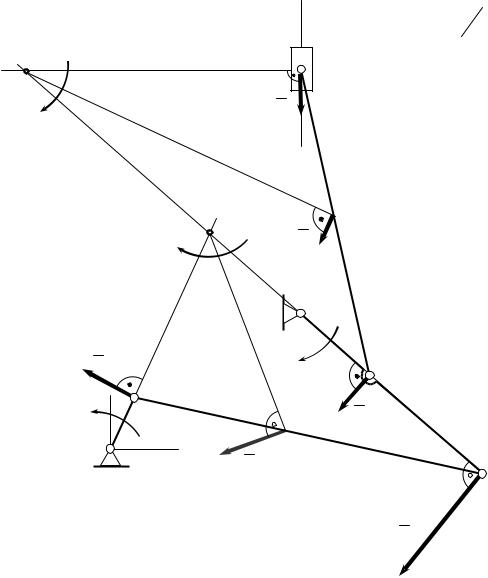
Изобразим механизм в заданном положении (Рис. 5), при значении угла поворота ведущего звена OA — ϕk =65°, в выбранном масштабе
длин — ML .
Определим точки механизма, траектории и возможные направления скоростей которых известны.
Шарнир A принадлежит шатуну AB и кривошипу OA , совершаю-
щему вращательное движение вокруг центра O . Кривошип OA является
ведущим звеном, угловая скорость которого известна. Следовательно, траектория точки A — окружность радиуса OA и скорость шарнира равна
v |
|
= ω OA = |
π |
15 = 2.62 см |
с |
, v OA |
(2.1) |
|
A |
0 |
18 |
|
A |
|
|
|
|
|
|
|
Шарнир B принадлежит шатуну AB и кривошипу O1B, совершающего
вращательное движение вокруг подшипника O1 . Следовательно, траектория
точки B — окружностьрадиуса O1B искоростьшарнира vB O1B .
Шарнир C принадлежит шатуну CD и кривошипу O1B, совершающе-
го вращательное движение вокруг подшипника O1 . Следовательно, траекто-
рия точки C — окружность радиуса O1C и скорость шарнира vC O1B .
25
ML =10 смсм
PCD |
D |
|
|
ω3 |
VD |
|
|
PAB |
K |
ω1 |
V |
|
|
|
K |
VA
A |
O |
ω0 |
O1 |
ω2 |
C
 M VC
M VC
VM  B
B
VB
Рис. 5 Определение скоростей точек с помощью МЦС
Точка D принадлежит шатуну CD и ползуну D , совершающему возвратно поступательное движение вдоль вертикальной направляющей.
Следовательно, траектория точки D — прямая линия и скорость ползуна vD &Oy .
Определение скоростей точек и угловых скоростей звеньев с помощью мгновенных центров скоростей (МЦС)
Определим положение МЦС для звеньев AB и CD , совершающих плоское движение (Рис. 5). Для этого из точки A проведем перпендикуляр
26

к скорости vA , а из точки B — перпендикуляр к возможному направлению скорости vB . Точка пересечения перпендикуляров — PAB является МЦС
звена AB для заданного положения механизма.
Аналогично определяем положение мгновенного центра скоростей для звена CD — PCD .
Измеряем на чертеже расстояния от узловых точек механизма до МЦС соответствующего звена. В соответствие с выбранным масштабом
длин эти расстояния равны |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
APAB = 48 см, |
MPAB =55.5 см, |
|
BPAB =99 см, |
|
||||||||||||
|
|
CPCD =132.5 см, |
KPCD =102 см, |
|
DPCD =85 см |
|
||||||||||||
Так как скорость точки A известна (2.1), то мгновенную угловую |
||||||||||||||||||
скорость звена AB вычисляем согласно выражению |
|
|
|
|
||||||||||||||
|
|
|
|
|
vA =ω0 OA =ωAB APAB |
|
|
|
|
|
|
|
|
|||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
=ω =ω |
OA |
= |
π |
15 = 0.0545 c−1 |
|
|
||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
AB |
|
1 |
0 AP |
18 48 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
Направление мгновенной угловой скорости звена определяем по на- |
||||||||||||||||||
правлению скорости точки A при мгновенном вращении звена вокруг МЦС. |
||||||||||||||||||
Модули скоростей точек B и M равны |
|
|
|
|
|
|
|
|
||||||||||
v |
|
=ω |
BP |
|
= 0.0545 99 |
=5.400 см |
с |
, |
v BP |
, |
||||||||
|
B |
AB |
AB |
|
|
|
|
|
|
|
|
B |
AB |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
v |
|
= ω |
MP |
|
= 0.0545 55.5 =3.027 см |
с |
, |
v |
|
MP |
, |
|||||||
|
M |
AB AB |
|
|
|
|
|
|
|
|
|
M |
AB |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
а направление скоростей определяется направлением вращения звена AB вокруг МЦС PAB .
Угловую скорость звена О1В вокруг подшипника O1 определим из соотношения
27

v |
B |
= ω |
BP |
|
= ω |
O B |
ω |
= ω = |
vB |
= 5.40 = 0.0818 c−1 |
||||
|
|
|||||||||||||
|
AB |
|
AB |
|
O B |
1 |
O B |
2 |
O1B |
|
|
66 |
||
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Скорость точки C равна |
|
|
|
|
|
|
||||||||
|
|
|
v |
C |
= ω |
O B = 0.0818 25 = 2.045 c−1, |
v |
C |
CP |
|||||
|
|
|
|
|
O B |
1 |
|
|
|
|
|
CD |
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Мгновенную угловую скорость звена CD вокруг определим из соотношения
v |
C |
= ω |
|
CP |
=ω |
O C |
ω |
= ω = |
|
vC |
|
= 2.045 = 0.0154 c−1 , |
||||||
|
|
|
|
|||||||||||||||
|
CD |
CD |
O B |
1 |
CD |
3 |
CPCD |
|
132.5 |
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а модули скоростей точек D и K выражениями |
|
|
|
|
|
|
||||||||||||
|
|
|
v |
|
= ω |
DP |
= 0.0154 85 |
=1.309 |
см |
|
с |
, |
v |
|
DP , |
|||
|
|
|
|
D |
|
CD |
CD |
|
|
|
|
|
|
|
|
D |
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
v |
|
= ω |
KP |
= 0.0154 102 |
=1.571 |
см |
с |
, |
v |
|
KP |
||||
|
|
|
|
K |
|
CD |
CD |
|
|
|
|
|
|
K |
CD |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Направление скоростей точек vD , vK определяется направлением мгновенного вращения звена CD вокруг МЦС — PCD .
На Рис. 5 изображены угловые скорости звеньев и векторы скоростей узловых точек в выбранном масштабе скоростей MV .
Определение скоростей точек и угловых скоростей звеньев с помощью теоремы о сложении скоростей
При неизвестной угловой скорости твердого тела совершающего плоскопараллельное движение теорему о сложении скоростей можно применять для тех точек звена, у которого известны: для одной — модуль и направление вектора скорости, а для другой — возможное направление вектора скорости, т.е. траектория движения.
Так как для звена AB вектор скорости шарнира A известен и по модулю и по направлению (2.1), а для шарнира B известна траектория движения, запишем теорему о сложении скоростей для точки B , приняв точку A за полюс:
28

|
vB = vA + vBA |
(2.2) |
|
где vA = ω0 OA = 2.62 см/ с, vA OA |
– скорость полюса, |
|
|
vBA =ωAB AB =? , |
vBA AB |
– скорость точки |
B при враща- |
|
|
тельном движении звена AB во- |
|
|
|
круг полюса A . |
(относительная |
скорость точки B в поступательном переносном движении)
Изображаем в выбранном масштабе скоростей MV (Рис. 6) вектор-
ный треугольник скоростей, соответствующий уравнению (2.2).
Откладываем в точке B вектор скорости полюса — vA . Из конца вектора vA проводим возможное направление вектора vBA — прямую,
перпендикулярную звену AB . Из точки B проводим направление вектора vB O1B до пересечения с прямой, определяющей направление вектора vBA . В точке пересечения данных прямых сходятся концы неизвестных векторов vBA и vB .
Измеряя указанные векторы, в соответствии с выбранным масштабом скоростей, получаем
|
vB =5.53 см |
с |
, vBA =5.47 см |
с |
||||
|
|
|
|
|
|
|||
|
Угловая скорость звена AB равна |
|
|
|||||
|
ω |
=ω = |
vBA |
= 0.0603 с−1 |
|
|||
|
|
|
||||||
|
AB |
1 |
|
|
BA |
|
|
|
|
|
|
|
|
|
|
||
|
Так как угловая скорость звена найдена, |
для точки М можно запи- |
||||||
сать теорему о сложении скоростей, приняв точку A за полюс: |
||||||||
|
|
vM = vA + vMA |
|
|
||||
где |
vA = ω0 OA = 2.62 см с, |
vA OA, |
||||||
|
vMA = ωAB AM = 2.53 см с, |
vMA AB |
||||||
29

MV |
=1 cмс |
&CD |
D |
|
|
см |
|
VD |
|
|
|
|
CD |
|
|
|
VC |
|
|
|
|
VCD |
|
|
|
|
|
|
ω3
K
VKC
&AB VA
A VA
O ω0 VAM
VM
VC
O1ω |
2 |
VK
CD
C
VC
VA
M
 B
B
AB |
ω |
|
|
V |
AB |
||
|
1 |
|
VB
O B |
|
AB |
1 |
|
Рис. 6 Определение скоростей с помощью теоремы о сложении скоростей в плоском движении.
Для нахождения скорости vM изображаем в точке M вектор скорости полюса — vA , а из его конца проводим перпендикулярно AB вектор отно-
сительной скорости vMA (Рис. 6). Соединяя точку M с концом вектора vMA ,
находим вектор скорости точки M — vM . После измерения получим
30

|
|
vM =3.13 |
см |
с |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Угловая скорость звена O1B равна |
|
|
|
|
|
|
|||||
|
ω |
= ω = |
vB |
|
= 0.0838 с−1 |
||||||
|
|
||||||||||
|
O B |
2 |
O1B |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Следовательно, скорость точки С равна |
|
|
|
||||||||
v |
=ω O C = 2.07 см |
c |
, |
|
v |
|
O B |
||||
C |
O B |
1 |
|
|
|
|
|
|
C |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Приняв точку C за полюс, применим теорему о сложении скоростей |
|||||||||||
к точке D звена CD , траектория которой известна |
|
||||||||||
|
|
vD = vC + vDC |
|
|
|
||||||
здесь vDC = ωCD CD =? см с, |
vCD CD – относительная скорость точки D . |
||||||||||
Скорости vD , vDC определяем графически, аналогично методу, изло-
женному ранее, построив в масштабе треугольник скоростей (Рис. 6)
|
vD =1.33 см |
с |
, |
vDC =1.33 |
см |
с |
||||
|
|
|
|
|
|
|
|
|||
|
Следовательно, угловая скорость звена CD равна |
|||||||||
|
ω |
=ω = |
vDC |
|
= 0.0155 с−1 |
|
||||
|
|
|
|
|||||||
|
CD |
3 |
|
|
CD |
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
Скорость точки K вычисляем по аналогии с определением скорости |
|||||||||
точки M . |
|
|
|
|
|
|
|
|
|
|
|
|
vK = vC + vKC |
|
|
||||||
где |
vC = 2.067 см с, |
|
|
|
vC O1B, |
|||||
|
vKC = ωCD CK = 0.73 см с, |
vKC CD |
||||||||
|
В этом случае (Рис. 6) |
|
|
|
|
|
|
|
|
|
|
|
vK =1.60 см |
с |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Следующий метод, являющийся графической интерпретацией тео- |
|||||||||
ремы о сложении скоростей, называется планом скоростей. Особенностью
31

метода является возможность быстрого определения скорости любой точки механизма.
Построим план скоростей в масштабе MV1 (Рис. 7).
Из произвольно выбранного полюса O проводим луч Oa , изображающий в выбранном масштабе скорость точки A — vA . Для определения скорости точки B через полюс O проводим прямую, параллельную скорости vB ( vB O1B ), а через точку "a" — прямую, перпендикулярную AB ,
т.е. параллельную скорости vBA . Получаем точку "b"; отрезок Ob опреде-
ляет скорость точки B , а отрезок ab — скорость vBA . Измеряем длину лу-
чей Ob , ab и, пользуясь масштабом скоростей находим
vB =5.30 |
см |
с |
, |
|
vBA =5.53 |
см |
с |
|
|
|
|
|
|
|
|
||
Для определения угловой скорости звена AB найдем с учетом вы- |
||||||||
бранного масштаба скоростей отношение |
|
|
||||||
ω |
= |
ab |
|
=0.057 c−1 |
|
|
||
|
|
|
|
|||||
AB |
|
AB |
|
|
|
|||
|
|
|
|
|
||||
Для определения скорости точки M делим отрезок ab плана скоро- |
||||||||
стей в отношении |
|
|
|
|
|
|
|
|
|
am |
|
= AM |
|
|
|||
|
ab |
|
|
AB |
|
|
||
Луч Om изображает скорость точки M — vM , а отрезок am — от-
носительную скорость vMA . Пользуясь масштабом скоростей, получаем
vM =3.00 |
см |
с |
, |
vMA = 2.40 см |
с |
|
|
|
|
||
Продолжая построение плана скоростей на Рис. 7, находим скорости |
|||||
точек vA , vB , vM , vC , vD , vK , |
а также угловые скорости звеньев ωAB = ω1 , |
||||
ωO B =ω2 , ωCD =ω3 . |
|
|
|
|
|
1 |
|
|
|
|
|
32
v |
|
= 2.00 см |
с |
, |
ω |
=0.08 c−1, |
|
|
C |
|
|
|
O B |
|
|
|
|
|
|
|
|
1 |
|
v |
|
=1.30 |
см |
с |
, |
ω |
=0.0151c−1, |
|
D |
|
|
|
CD |
|
|
|
|
|
|
|
|
||
vK =1.53 |
см |
с |
. |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
OA |
a |
|
|
|
|
смс |
V |
A |
||
|
|
|
|
|
||
MV |
= 0.5 |
|
|
|
|
|
см |
|
|
|
|||
1 |
|
|
|
|
||
|
|
|
|
|
|
|
o
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
V |
|
|
|
|
|
|
|
V |
|
|||||||||
|
AM |
|
|
|
|
|
|
V |
|
D |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|||
|
|
m |
|
|
VC |
|
|
|
CD |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
d |
|||||||
V |
M |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
c |
|
|
|
k VCD |
|
||||||||
|
|
|
|
|
|
V |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
CK |
|
|
|
|
|
|
|
|
|
&O2D
VAB
b VB
O1B
AB
Рис. 7 План скоростей
33