

-
Двигатели для приводов подач
В приводах подач современных станков с ЧПУ преимущественное применение нашли электроприводы с двигателями постоянного тока и в первую очередь с высокомоментными двигателями серий ПВ и ДМ в комплекте о тиристорными преобразователями. Регулирование частоты вращения двигателя производится изменением напряжения в цепи якоря при неизменном возбуждении, что обеспечивает максимально допустимый момент во всем диапазоне регулирования. Такого рода приводы наиболее полно отвечают требованиям, предъявляемым к приводам подач металлорежущих станков; к тому же они имеют достаточно широкую номенклатуру (номинальный момент двигателей отечественного производства серий ДК-1 и ПВ изменяется от 1,7 до 175 Н·м). Для создания обратной связи по частоте вращения двигатели ПВ ж ДК-1 комплектуются измерительными преобразователями – тахогенераторами. В комплект двигателей могут входить также тормоз и датчик положения.
Основные технические данные двигателей серии ПВ даны в табл.1; на рис. З. приведены кривые допустимых моментов этих двигателей при различных режимах работы; а в табл. 2,3 и на рис.4, 5 и 6 - габаритные и присоединительные размеры. Технические данные применяемых в двигателях ПВ тахогенераторов и тормозов, а также технические данные двигателей серии ДК-1 приведены в соответствующих каталогах и технической литератур, например (10,11).
Широкое применение в мировой практике станкостроения получили высокомоментные электродвигатели, выпускаемые фирмой FANUK
(Япония). Технические данные этих двигателей указаны в таблице 4.
Таблица 1
Технические характеристики двигателей серии ПВ (СССР)
|
Параметры |
Параметры электродвигателя типа |
|||||||||||
|
ПБВ 100 |
ПБВ 112 |
ПБВ 132 |
ПБВ 160 |
|||||||||
|
При условной длине якоря |
||||||||||||
|
M |
L |
S |
M |
L |
M |
L |
S |
M |
||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|||
|
Номинальные: |
|
|
|
|
|
|
|
|
|
|||
|
Момент, Н·м |
7,16 |
10,5 |
14 |
17,5 |
21 |
35 |
47,7 |
76 |
105 |
|||
|
Частота вращения, мин-1 |
1000 |
1000 |
750 |
600 |
500 |
600 |
600 |
500 |
500 |
|||
|
Мощность, кВт |
0,75 |
1,1 |
1,1 |
1,1 |
1,1 |
2,2 |
3,0 |
4,0 |
5,5 |
|||
|
Напряжение, В |
52 |
56 |
44 |
47 |
50 |
53 |
70 |
66 |
78,5 |
|||
|
Ток, А |
18 |
24 |
31,5 |
29 |
28 |
50 |
50 |
78,5 |
90 |
|||
|
Длительный момент в заторможенном состоянии, Н·м |
8,2 |
12 |
17,5 |
22 |
29 |
47 |
62 |
84 |
110 |
|||
|
Максимальный момент при пуске, Н·м |
70 |
100 |
130 |
170 |
210 |
350 |
470 |
490 |
510 |
|||
|
Максимальная частота вращения в продолжительном режиме, мин-1 |
2000 |
2000 |
2000 |
2000 |
2000 |
2000 |
2000 |
2000 |
2000 |
|||
|
Постоянная ЭДС, В·мин/об |
0,045 |
0,044 |
0,051 |
0,069 |
0,085 |
0,077 |
0,105 |
0,118 |
0,141 |
|||
|
Момент инерции якоря, кг·м2: |
|
|
|
|
|
|
|
|
|
|||
|
Двигатель с тахогенератором
|
0,01 |
0,013 |
0,035 |
0,042 |
0,049 |
0,188 |
0,238 |
0,242 |
0,296 |
|||
|
С тахогенератором и тормозом |
0,0112 |
0,0142 |
0,0366 |
0,0433 |
0,0504 |
0,0190 |
0,0240 |
0,246 |
0,302 |
|||
|
Электромагнитная постоянная времени, мс |
5,3 |
5,75 |
6,75 |
7,3 |
7,65 |
7,35 |
7,85 |
10,63 |
11,8 |
|||
|
Сопротивление обмотки якоря при 15°С, Ом |
0,222 |
0,139 |
0,109 |
0,123 |
0,144 |
0,057 |
0,071 |
0,032 |
0,034 |
|||
|
Индуктивность обмотки якоря, мГн |
1,18 |
0,8 |
0,732 |
0,898 |
1,102 |
0,422 |
0,554 |
0,337 |
0,405 |
|||
|
Тепловая постоянная времени, мин |
60 |
70 |
60 |
70 |
80 |
90 |
100 |
- |
- |
|||
|
Масса электродвигателя с тахогенератором |
27 |
33 |
41 |
45 |
52 |
83 |
100 |
168 |
182 |
|||
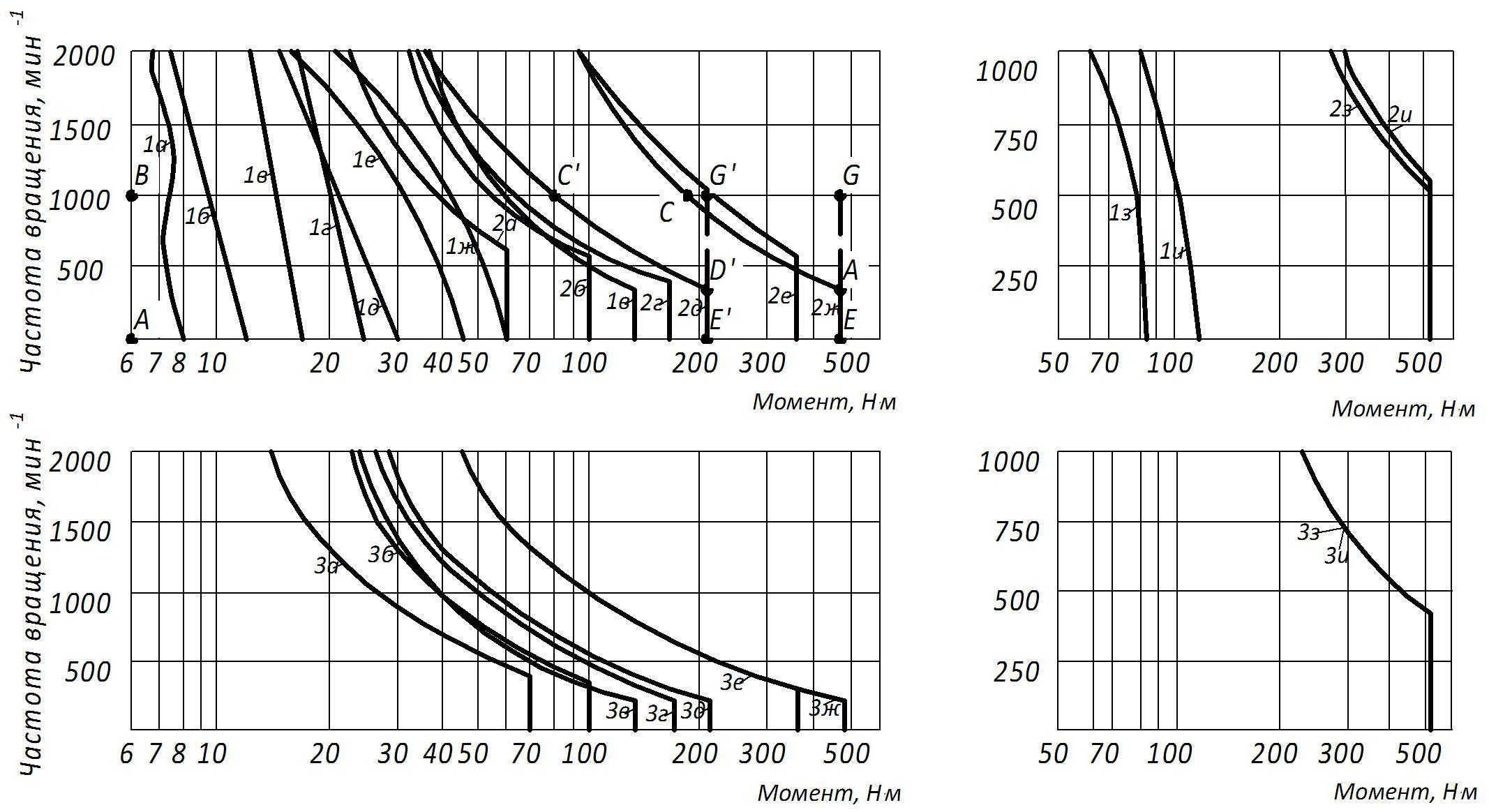
Рис. 3. Кривые допустимых моментов электродвигателей серии ПВ при различных режимах работы. Обозначения букв соответствуют двигателям: а – ПБВ100М, б – ПБВ100L, в – ПБВ112S, г – ПБВ112М, д – ПБВ112L, е – ПБВ132М, ж – ПБВ132L, з – ПБВ160М, и – ПБВ160L. Кривые 1а……1и – продолжительный режим, 2а……2и – режим в переходных процессах, 3а…….3и – рабочий кратковременный режим.
Таблица 2
Габаритные и присоединительные размеры двигателей ПБВ100 – ПБВ132
|
Двигатель |
d20 |
d24 |
d25 |
d50 |
L21 |
b30 |
h30 |
h35 |
d1 |
L1 |
h5 |
h1 |
b1 |
t1 |
|
ПБВ 100 |
215 |
250 |
180 |
192 |
16 |
192 |
192 |
235 |
28 |
42 |
31 |
7 |
8 |
4 |
|
ПБВ 112 |
215 |
250 |
180 |
220 |
18 |
220 |
220 |
290 |
32 |
58 |
35 |
8 |
8 |
5 |
|
ПБВ 132 |
265 |
300 |
230 |
270 |
22 |
270 |
270 |
322 |
32 |
58 |
41 |
8 |
10 |
5 |
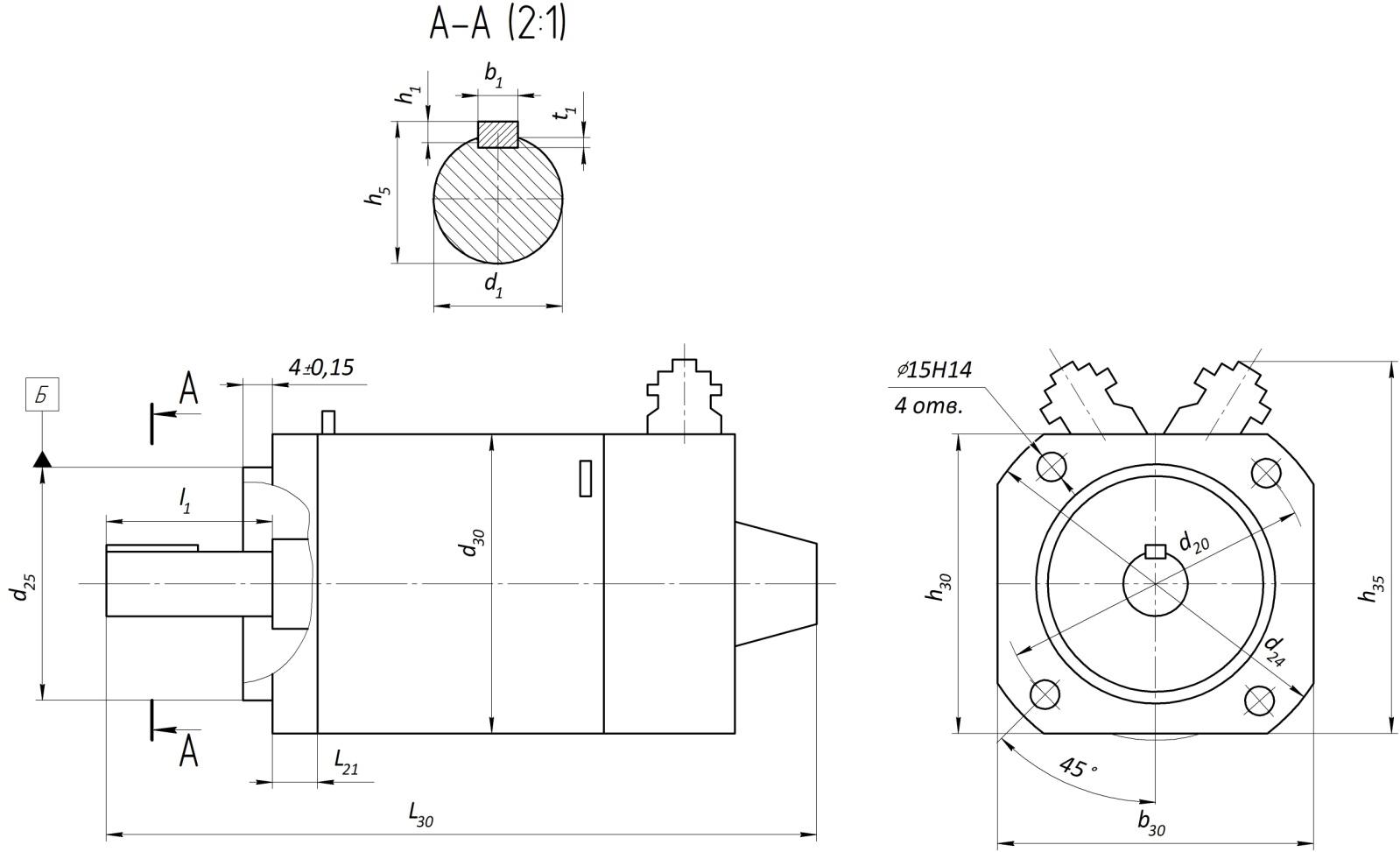
Рис. 4. Габаритные и присоединительные размеры двигателей ПБВ100 – ПБВ132
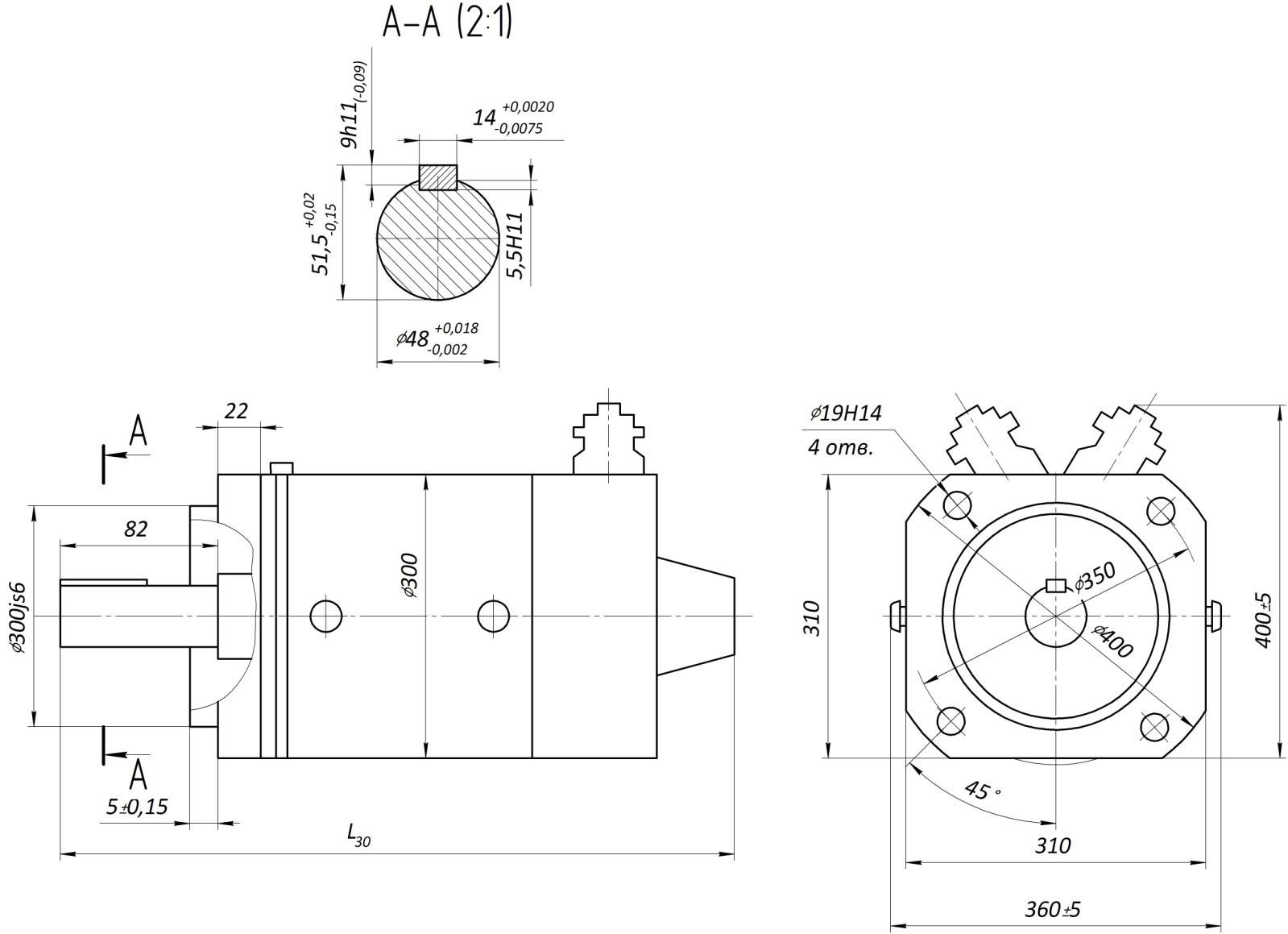
Рис. 5. Габаритные и присоединительные размеры двигателей ПБВ160

Рис. 6. Габаритные и присоединительные размеры двигателей ПФБ160.
Таблица 3
Полная длина (L30), мм и масса (G), кг двигателей серии ПВ
|
Тип электро- двигателя |
Без тормоза и датчика положения |
С тормозом |
С датчиком положения |
С тормозом и датчиком положения |
||||
|
L30 |
G |
L30 |
G |
L30 |
G |
L30 |
G |
|
|
ПБВ 100М |
476±5 |
27 |
555±5 |
34 |
561±5 |
29 |
640±5 |
36 |
|
ПБВ 100L |
536±5 |
33 |
615±5 |
40 |
621±5 |
35 |
700±5 |
42 |
|
ПБВ 112S |
515±5 |
41 |
605±5 |
55 |
603±5 |
44 |
693±5 |
58 |
|
ПБВ 112M |
555±5 |
45 |
645±5 |
59 |
643±5 |
48 |
733±5 |
62 |
|
ПБВ 112L |
595±5 |
52 |
685±5 |
66 |
683±5 |
55 |
773±5 |
69 |
|
ПБВ 132M |
652±5 |
83 |
762±5 |
105 |
732±5 |
86 |
842±5 |
108 |
|
ПБВ 132L |
722±5 |
100 |
832±5 |
122 |
802±5 |
103 |
912±5 |
125 |
|
ПБВ 160M |
786±5 |
168 |
896±5 |
186 |
875±5 |
170 |
985±5 |
188 |
|
ПБВ 160L |
841±5 |
12 |
951±5 |
200 |
930±5 |
184 |
1040±5 |
202 |
|
ПФБ 160S |
731±5 |
162 |
841±5 |
180 |
820±5 |
164 |
930±5 |
182 |
|
ПФБ 160M |
786±5 |
176 |
896±5 |
194 |
875±5 |
178 |
985±5 |
196 |
Таблица 4
Технические данные двигателей FANUC (Япония)
|
Параметры |
Модель |
|||||||||
|
00 |
0 |
5 |
10 |
20 |
30 |
40 |
45 |
50 |
60 |
|
|
Момент в заторможенном состоянии, Н·м |
0,98 |
2,7 |
5,4 |
11,8 |
22,5 |
37,7 |
32,5 |
47,0 |
65,7 |
98 |
|
Максимальный момент при пуске, Н·м |
3,4 |
24 |
47 |
114 |
541 |
361 |
551 |
329 |
462 |
707 |
|
Максимальная частота вращения в длительном режиме, мин-1 |
2000 |
2000 |
2000 |
1500 |
1000 |
2000 |
2000 |
2000 |
2000 |
2000 |
|
Момент при максимальной частоте вращения, Н·м |
0,78 |
2,2 |
4,5 |
7 |
10 |
30 |
22 |
35 |
50 |
73 |
|
Момент при n= 500 мин-1, Н·м |
0,95 |
2,6 |
5 |
11 |
20 |
35 |
30 |
45 |
60 |
80 |
|
Момент инерции якоря, кг·м2 |
0,0002 |
0,0028 |
0,0049 |
0,02 |
0,032 |
0,043 |
0,12 |
0,15 |
0,19 |
0,27 |
|
Электромеханическая постоянная времени, мс |
9 |
25 |
15 |
19 |
14 |
10 |
24 |
16 |
15 |
12 |
|
Тепловая постоянная времени, мс |
15 |
50 |
55 |
100 |
105 |
110 |
115 |
120 |
120 |
120 |
|
Масса двигателя с тахогенератором и датчиком положения, кг |
2,7 |
12,0 |
16 |
26 |
35 |
46 |
90 |
110 |
125 |
160 |
Успешное применение высокомоментньх двигателей в приводах подач металлорежущих станков, и в первую очередь в станках с ЧПУ, обусловлено рядом их преимуществ перед применявшимися до недавнего времени электродвигателями постоянного тока с пазовым ротором и электромагнитным возбуждением (11).