

-
Общие сведения
-
Требования к приводам подач станков с чпу
-
Привод подач, являясь важнейшей составной частью станка с ЧПУ должен обеспечить создание необходимого тягового усилия для перемещения исполнительного органа /ИО/ как со скоростями рабочих подач в пределах требуемого диапазона, так и при ускоренных перемещениях на холостом ходу.
Характер требований к приводам подач, как и к большинству других узлов и механизмов станка, обусловлен в первую очередь решением задачи обработки поверхностей изделий с заданным качеством при максимальной производительности. К основным требованиям, предъявляемым к приводам подач станков с ЧПУ относятся следующие: высокая жесткость, в значительной степени определяющая точность перемещений ИО, а следовательно, и точность обработки; достаточное быстродействие, необходимое как для обеспечения кратковременности (до 0,1- 0,2 с) пуска и торможения при апериодическом характера этих процессов так и для сокращения времени переходных процессов в условиях работы с резкими колебаниями нагрузки; широкий диапазон регулирования скоростей, обеспечивающий возможность перемещений со скоростями от 1 - 2 мм/мин /точное позиционирование (до 10 - 20 м/мин) быстрое перемещение на холостом ходу; равномерность движения при различной нагрузке на всех скоростях; оптимальные массогабаритные показатели.
-
Общая структура приводов подач
Приводы подач станков с ЧПУ могут иметь системы управления разомкнутого или замкнутого типов (рис.1).
Приводы с разомкнутыми системами управления (рис. 1а) строят на основе силовых или не силовых шаговых двигателей (ШД). В последнем случае шаговый двигатель используют совместно с гидроусилителем (ГУ). Достоинствами такого привода являются: естественный характер связи с устройством задания программы в унитарном коде, простота конструкции отсутствие каналов обратной связи и средств определения положения и скорости исполнительного органа.
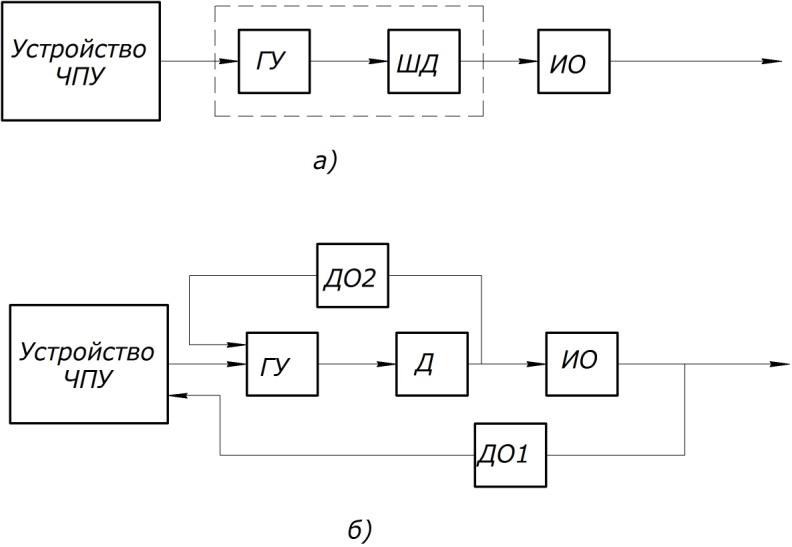
Рис.1. Схемы управления приводом подачи станка с ЧПУ: а - разомкнутого типа; б - замкнутого типа; в-привод с линейным двигателем
Однако из-за отсутствия контроля действительного положения ИО на точность его перемещений будут влиять погрешности шагового двигателя, гидроусилителя и передаточных механизмов привода. Кроме того, следует отметить существенное ограничение скорости, необходимость, во избежание пропуска импульсов, плавного разгона при входе на режим ускоренных перемещений и плавного торможения при выходе из режима, невосполнимая потеря информации в случае сбоя (пропуска шага).
Несмотря на отмеченные недостатки, шаговый привод находит применение, и в первую очередь там, где главенствующую роль играют не требования к точности перемещений, а экономические соображения.
В современных станках с ЧПУ основным является замкнутый тип систем управления приводами подач (рис. 1б). В основе их работы лежит принцип, по которому работают следящие системы управления. В системах такого типа c помощью датчика обратной связи Д01 производится прямое или косвенное определение положения ИО, что существенным образом увеличивает точность перемещения. Чтобы повысить точность управления (уменьшить зону нечувствительности и влияние различного рода нелинейностей), а также увеличить жесткость механической характеристики привода, в замкнутых системах управления присутствует обратная связь по скорости двигателя, содержащая датчик обратной связи Д02, сигналы от которого поступают в усилитель мощности УМ. Из систем замкнутого типа в приводах подач станков о ЧПУ наибольшее распространение (7) поручили такие, в которых производится косвенное определение положения ИО с помощью кругового датчика, жестко связанного c ходовым винтом или валом электродвигателя. В этом случае особо высокие требования предъявляются к точностным характеристикам передачи винт-гайка и опорам винта, поскольку они не охвачены обратной связью. Однако изготовление винтовых пар и опор ходовых винтов с высокой точностью, правильный выбор диаметра винта, создание предварительного натяга
для устранения зазоров и повышения жесткости в винтовой паре и опорах дают возможность широко применять замкнутые системы управления во многих станках с ЧПУ для получения высокой точности перемещений исполнительных органов.
Большую точность перемещений ИО обеспечивают системы управления, в которых место расположения кругового датчика находится в непосредственной близости к ИО, например, когда этот датчик связан с ИО через высокоточную реечную передачу. Прямое определение перемещений ИО станка может быть осуществлено при использовании линейных датчиков обратной связи. В последних двух случаях системы обратной связи являются более сложными и дорогими и потому их применяют, когда требуется получить высокую точность перемещения ИО.
-
Механическая часть привода подач
Эта часть привода содержит следующие составные элементы:
- исполнительный орган (перемещаемый узел);
- механизм преобразования вращательного движения в поступательное; как правило, это передача винт - гайка качения и лишь в тяжелых станках с длиной хода перемещаемого узла более 3-4 м - червячно-реечные или шестеренно-реечные передачи;
- редуктор для снижения скорости движения, передаваемого от двигателя к перемещаемому узлу; содержит устройство для автоматической выборки зазоров в подвижных соединениях;
- опоры ходового винта, в качестве которых в настоящее время находят применение прецизионные упорные роликовые подшипники с предварительным натягом, обеспечивающие высокую нагрузочную способность, жесткость и износостойкость;
- упругая муфта с высокой крутильной жесткостью, позволяющая создать беззазорное соединение валов и допускающая некоторые перекосы и несоосность валов.
На рис.2 представлен пример схемы привода подачи с замкнутой системой управления, содержаний редуктор РД и передачу винт - гайка качения ВГК.
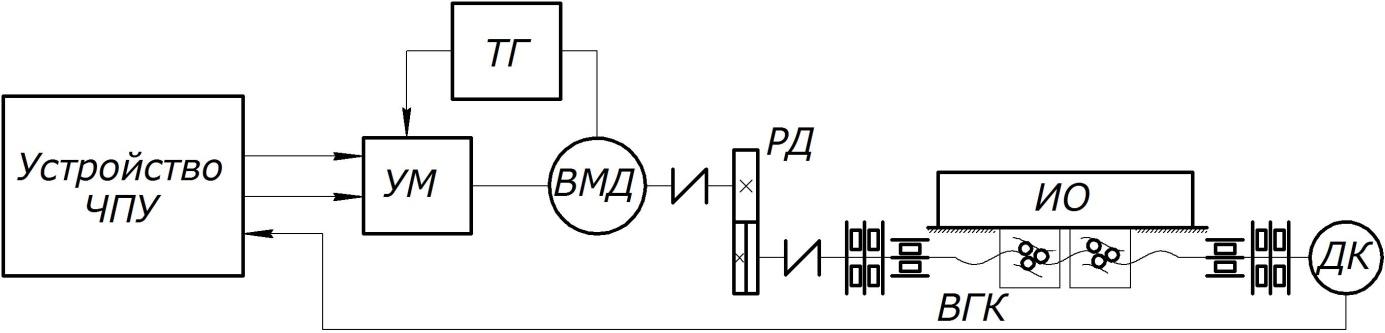
Рис. 2. Схема привода подачи с передачей винт-гайка качения и системой управления замкнутого типа
Обратная связь по положению в этой схеме реализуется с помощью установленного на ходовом винте датчика обратной связи ДК, например, типа вращающегося трансформатора: обратная связь по скорости обеспечивается тахогенератором ТГ. Опорами винта служат комбинированные упорно-радиальные роликоподшипники. Питание высоко-моментного приводного двигателя ВМД осуществляется от усилителя мощности УМ, например, регулируемого тиристорного преобразователя.