

6.3. Расчеты и построения
1) Рассчитать значение момента, создаваемого нагрузочной машиной (ММПТ), по формуле (2.5).
2) Рассчитать значения момента потерь Mпот для различных значений частоты вращения ротора асинхронной машины для первого квадранта механической характеристики:
![]() (6.2)
(6.2)
где Mпот.0 и Mпот.х – значения моментов потерь, определенных в п. 5.3, Н·м.
3) Зная момент, создаваемый нагрузочной машиной (ММПТ) и момент потерь (Мпот) рассчитать электромагнитный момент двигателя:
МАД = МДПТ + Мпот. (6.3)
4) Построить на одном рисунке четыре механические характеристики в режиме динамического торможения n = f (МАД) (см. рис. 6.3).
6.4. Контрольные вопросы
1) Какие преимущества и недостатки динамического торможения асинхронного двигателя?
2) Каким образом создается неподвижное магнитное поле, в котором вращается ротор асинхронной машины в режиме динамического торможения?
3) Каким образом создается тормозной электромагнитный момент асинхронной машины в режиме динамического торможения?
4) Как влияет сопротивление в цепи ротора асинхронной машины на механические характеристики в режиме динамического торможения?
5) Как влияет сила тока в цепи статора асинхронной машины на механические характеристики в режиме динамического торможения?
7. Исследование механической характеристики асинхронного двигателя при различных частотах питающего напряжения
Ц е л ь р а б о т ы: изучить особенности семейства механической характеристики асинхронного двигателя при различных частотах питающего напряжения [ ].
7.1. Основные положения теории
При регулировании частоты питающего напряжения АД следует иметь помнить, что основной магнитный поток Φ пропорционален действующему значению подведенного к обмотке статора напряжения U1 и обратно пропорционален его частоте f1:
![]() . (7.1)
. (7.1)
Если при U1 = const уменьшать f1, то увеличение потока приведет к насыщению стали машины и резкому увеличению тока намагничивания, что увеличит потери мощности. Если увеличивать частоту, то вследствие уменьшения потока снизится крутящий момент двигателя. Для наилучшего использования АД и получения необходимых свойств электропривода применяются различные законы регулирования частоты питающего напряжения. Строгое выполнение закона регулирования U1/f1 = const не обеспечивает постоянства максимального момента, так как при снижении частоты активное сопротивление обмотки статора становится соизмеримым с индуктивным, при этом момент снижается (рис. 7.1).
На рис. 7.2 приведены механические характеристики при различных законах регулирования выше и ниже номинальной частоты питающего напряжения, – падение напряжения в обмотке статора.
Способ регулирования угловой скорости с плавным регулированием частоты питающего напряжения считается экономичным, весьма эффективным, но требует дорогого оборудования – преобразователя частоты (ПЧ).


Рис. 7.1 Рис. 7.2
7.2. Последовательность операций при проведении исследования
1) Привести ручки (рычажки) аппаратов испытательного стенда в исходное положение в соответствии с табл.1.1. Собрать схему, показанную на рис. 7.3. Предъявить схему для проверки преподавателю.
При снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать номинального значения, равного ±1 А.
Установить перемычку между точками X1 и X2 модуля «Преобразователь частоты».
2) Включить автоматические выключатели QF1 «Модуля питания стенда» и QF2 «Модуля питания», перевести тумблер SA1 модуля «Преобразователь частоты» во включенное положение.
3) Движком потенциометра RP1 модуля «Преобразователь частоты» установить значение синхронной частоты вращения АД n1 = 1500 об/мин, соответствующее частоте питания АД f1 = 50 Гц, контролируя требуемую величину синхронной частоты n1 по цифровому индикатору модуля «Преобразователь частоты».
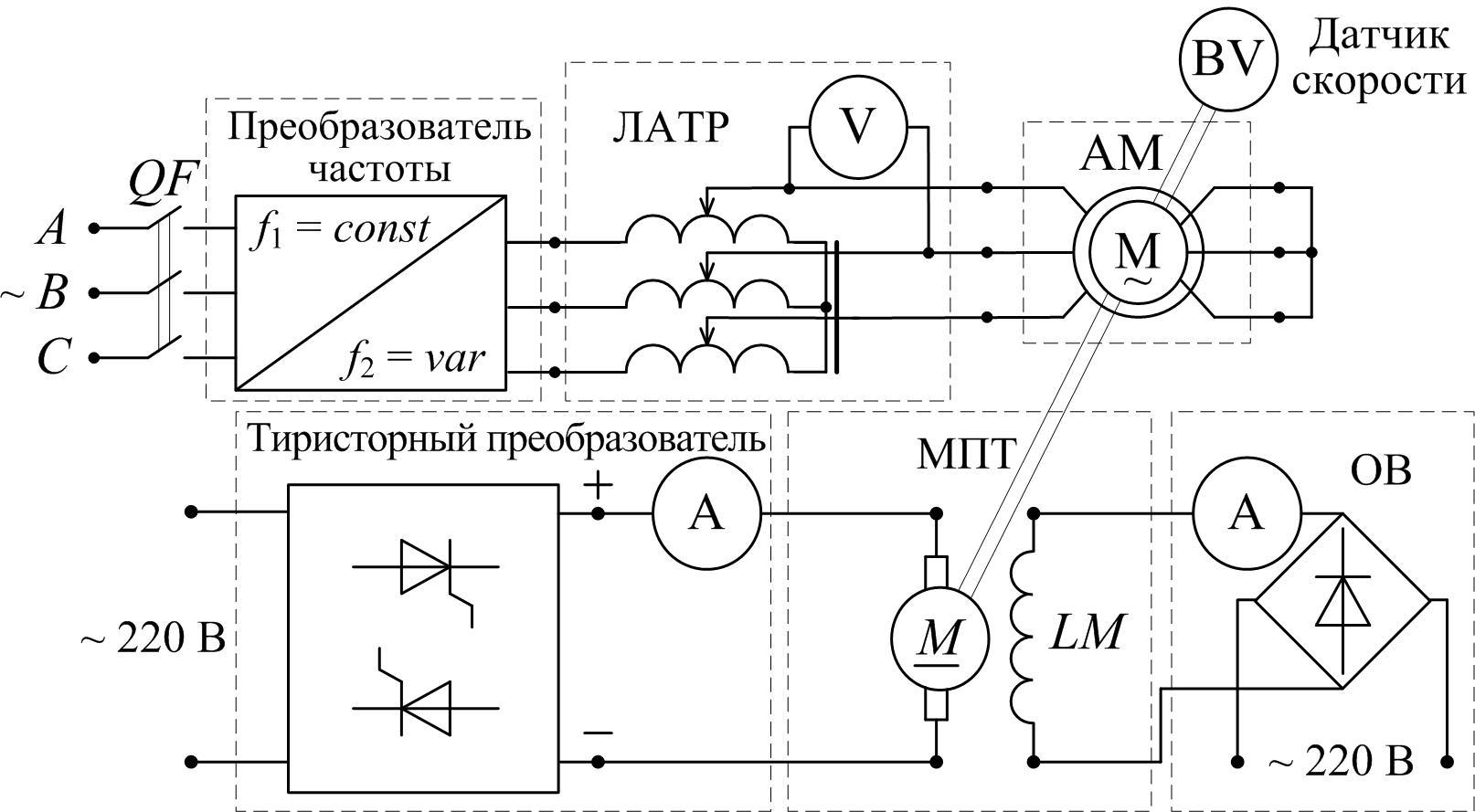
Рис. 7.3. Электрическая схема для исследования механических характеристик при различных частотах питающего напряжения
4) Установить на выходе автотрансформатора напряжение U = 170 В;
5) Перевести тумблеры «Сеть» и SA6 модуля «Тиристорный преобразователь» во включенное положение.
6) Убедиться, что АД находится в генераторном режиме – увеличение тока якоря нагрузочной машины приводит к увеличению частоты вращения АД (в противном случае следует уменьшить ток якоря Iя до нуля, отключить переключатель SA6, перевести переключатель SA5 в положение «Назад» и вновь включить SA6). Увеличивая нагрузку АД, снять две-три точки генераторного режима работы АД, одну точку в режиме идеального холостого хода.
7) Уменьшить ток якоря Iя до нуля, отключить переключатель SA6, перевести переключатель SA5 в положение «Вперед» и вновь включить SA6. Снять 6 – 8 точек двигательного режима работы АД, внимательно фиксируя максимальное значение момента (точку перегиба характеристики). Зафиксировать точку в момент остановки двигателя (n2 = 0). Путем дальнейшего повышения тока якоря нагрузочной машины Iя перевести АД в режим противовключения, зафиксировать точку, при которой двигатель начинает вращаться и одну-две точки в режиме противовключения (n2 < 0).
8) Повторить пп. 2–7 для другого значения синхронной частоты n1 (частоты питающего напряжения f1). Результаты измерений записать в табл. 7.1.
Т а б л и ц а 7.1
Экспериментальные и расчетные данные
|
Эксперимент |
Расчет | ||||||
|
n1, об/мин* |
U1, В |
n2, об/мин |
Iя, А |
f1, Гц |
МНМ, Нм |
МАД, Нм |
U1/f1 |
|
1500 |
|
|
|
|
|
|
|
|
1100 |
|
|
|
|
|
|
|
|
700 |
|
|
|
|
|
|
|
* – для каждого значения n1 необходимо снять кривую из 16 точек.
9) По завершении снятия показаний на модуле «Тиристорный преобразователь» движок потенциометра RP1 повернуть против часовой стрелки до упора, уменьшив ток якоря нагрузочной МПТ до нуля, на модуле «Преобразователь частоты» движок потенциометра RP1 повернуть против часовой стрелки до упора, снизив частоту вращения АД до нуля, привести переключатели на стенде в исходное положение.