

5.3. Расчеты и построения
1) Рассчитать коэффициент С по выражению (2.6) и электромагнитный момент, создаваемый машиной постоянного тока Мэкс, по выражению (2.5).
2) Зная момент, создаваемый нагрузочной машиной (Мэкс), полученный на стенде при пониженном напряжении (U1экс) на двигателе, рассчитать момент на валу двигателя, соответствующий номинальному напряжению (U1н = 380 В) при тех же значениях частоты вращения по выражению:
MМПТ
=
MМПТэкс
 . (5.1)
. (5.1)
3) Построить зависимости n = f (ММПТ).
4) По полученным зависимостям n = f (ММПТ) определить моменты потерь при заторможенном роторе (М0 пот) и при идеальном холостом ходе (Мх.пот) (см. рис. 5.1).
5) Построить кривую потерь n = f (Мпот) по двум найденным точкам: (Мпот; 0), (Мх.пот; n0).
6) Построить механическую характеристику АМ, графически сложив кривую n = f (ММПТ) с кривой потерь n = f (Мпот).
5.4. Контрольные вопросы
1) На какие характерные участки можно разделить график механической характеристики асинхронной машины?
2) В чем особенность определения электромагнитного момента асинхронной машины в данной работе?
3) При каком условии асинхронная машина переходит из двигательного режима в генераторный?
4) При каком условии асинхронная машина переходит из двигательного режима в режим торможения противовключением?
5) В чем физическая сущность момента потерь асинхронной машины?
6. Исследование механических характеристик асинхронной машины в режиме динамического торможения
Ц е л ь р а б о т ы: изучить режим динамического торможения асинхронной машины, снять естественные и реостатные механические характеристики при различных токах в обмотке статора, построить и проанализировать полученные зависимости [3, с. 332; 4, с. 201 – 206; 6, с. 32, 33].
6.1. Краткие теоретические сведения
Динамическое торможение асинхронного двигателя осуществляется подключением обмотки статора к источнику постоянного тока. Для ограничения тока и получения различных тормозных характеристик цепь ротора замыкается на внешние резисторы.
Обмотка статора может иметь различные схемы включения при питании их от источника постоянного тока [Чиликин МГ]. В лабораторной работе предлагается использовать схему (рис. 6.1), которая является простой и часто применяется на практике.
П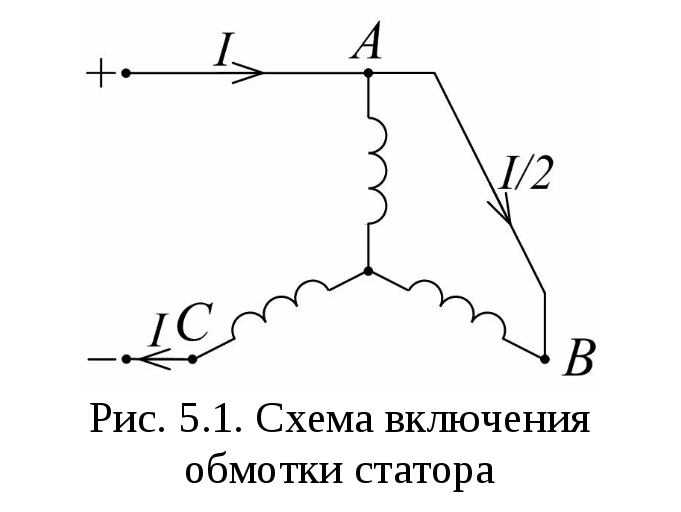 остоянный
ток, протекающий по обмотке статора,
образует неподвижное поле, основная
волна которого дает синусоидальное
распределение индукции в воздушном
зазореBδ.
остоянный
ток, протекающий по обмотке статора,
образует неподвижное поле, основная
волна которого дает синусоидальное
распределение индукции в воздушном
зазореBδ.
В процессе вращения проводника обмотки ротора в неподвижном магнитном поле на него будет воздействовать переменное значение индукции в зазоре. По правилу правой руки можно определить направление наводимой в проводнике ротора ЭДС (рис. 6.2), мгновенное значение которой:
e2i = lvBδi, (6.1)
где l – активная длинна проводника ротора, v – его линейная скорость, Bδi – значение индукции магнитного поля в месте нахождения проводника.
Э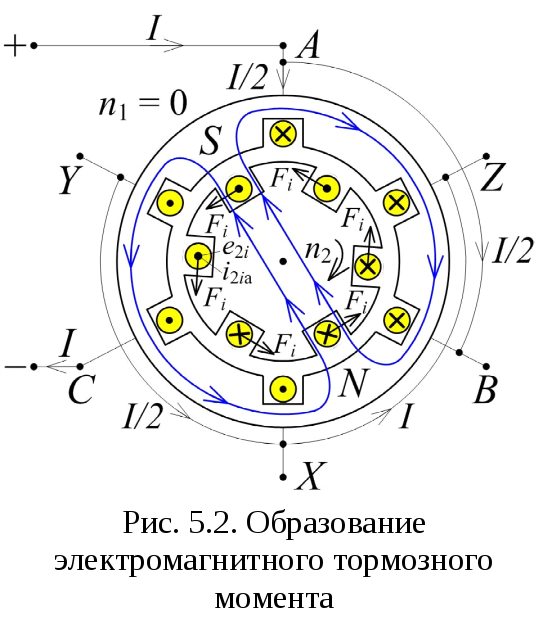 ДС,
наводимые в проводниках обмотки ротора,
создают токи, отстающие по фазе от ЭДС.
Активная составляющаятока
i-го
проводника обмотки ротора i2ia
совпадает по фазе с ЭДС и выполняет
работу по торможению ротора, реактивная
составляющая обусловлена наличием
магнитных полей и работы не выполняет.
ДС,
наводимые в проводниках обмотки ротора,
создают токи, отстающие по фазе от ЭДС.
Активная составляющаятока
i-го
проводника обмотки ротора i2ia
совпадает по фазе с ЭДС и выполняет
работу по торможению ротора, реактивная
составляющая обусловлена наличием
магнитных полей и работы не выполняет.
Направление действия электромагнитных сил Fi можно определить по правилу левой руки (см. рис. 6.2). Эти силы направлены встречно направлению вращения ротора. Среднее значение электромагнитной силы можно определить по закону Ампера:
Fi = lI2iaBδ~ , (6.2)
где I2ia – действующее значение активной составляющей тока ротора, А;
Bδ~ – действующее значение магнитной индукции в воздушном зазоре, Тл.
Тормозной электромагнитный момент ротора определяется суммарным действием электромагнитных сил, приложенных ко всем проводникам ротора.
М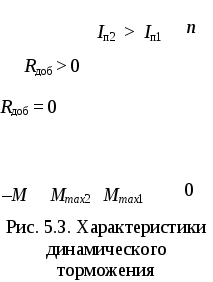 еханические
характеристики в режиме динамического
торможения расположены во втором
квадранте (рис. 6.3). Они проходят через
начало координат, так как при угловой
скорости, равной нулю, тормозной момент
в этом режиме также равен нулю. Максимальный
момент пропорционален квадрату
приложенного к статору напряжения и
возрастает с ростом напряжения.
Критическое скольжение (скольжение,
соответствующее максимальному моменту)
зависит от сопротивления роторной цепи.
Оно увеличивается пропорционально
росту сопротивления, максимальный
момент при этом не изменяется.
еханические
характеристики в режиме динамического
торможения расположены во втором
квадранте (рис. 6.3). Они проходят через
начало координат, так как при угловой
скорости, равной нулю, тормозной момент
в этом режиме также равен нулю. Максимальный
момент пропорционален квадрату
приложенного к статору напряжения и
возрастает с ростом напряжения.
Критическое скольжение (скольжение,
соответствующее максимальному моменту)
зависит от сопротивления роторной цепи.
Оно увеличивается пропорционально
росту сопротивления, максимальный
момент при этом не изменяется.
Подробнее теоретические сведения о динамическом торможении АМ рассмотрены в [1,6].