

4.2 Регуляторы системы старт
Позиционный регулятор ПР-1.5
Регулятор ПР-1.5 предназначен для двухпозиционного регулирования.
Обеспечивает получение дискретных пневматических сигналов 0 и 1 при повышении или понижении поступающего на вход регулятора давления сжатого воздуха, пропорционального величине регулируемого или измеряемого параметра, когда последний отклоняется от заданного значения.
Прибор может быть настроен на получение пневматического сигнала при превышении измеряемым параметром заданного значения (сигнал «на максимум») или при уменьшении величины параметра ниже заданного значения (сигнал «на максимум»).
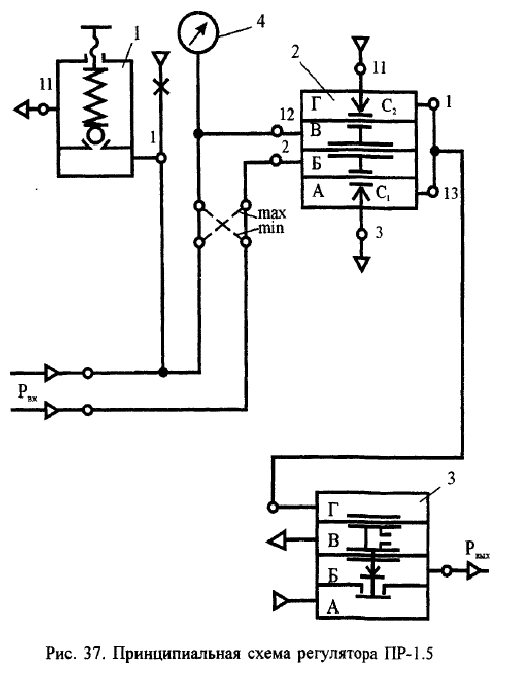
При настройке на минимум (рис. 37) входной сигнал от измерительного блока поступает в камеру Б элемента сравнения 2, давление задания от задатчика 1 подводится к камере В. Если входной сигнал больше величины давления задания, то сопло С2 закрыто и сигнал на выходе элемента сравнения равен 0. Как только входной сигнал станет меньше заданного, сопло С2 откроется и на выходе сформируется сигнал 1, который поступает на усилитель мощности 3 и далее на выход регулятора. При настройке на максимум давление задания подается в камеру Б, а давление от измерительного блока — в камеру В, перенастройка регулятора производится поворотом диска, который переключает входные каналы регулятора.
8.1. ПОЗИЦИОННЫЙ РЕГУЛЯТОР ПР 1.5-М1
Позиционный регулятор типа ПР 1.5-М1 относится к приборам системы "Старт", построенных на элементах УСЭППА, и предназначен для реализации двухпозиционных систем автоматического регулирования и схем сигнализации.
Позиционный регулятор реализует закон регулирования вида

где Рвых – значение выходного сигнала; Рп – значение сигнала регулируемой величины, поступающего с измерительного преобразователя; Рз – заданное значение регулируемой величины.
Так как регуляторы, реализующие такой закон регулирования, имеют ольшую инертность, их рекомендуется применять на объектах с самовыравниванием, для которых отношение времени запаздывания к постоянной времени объекта больше 0,2.
Динамические характеристики прибора оцениваются по быстродействию и допустимой скорости изменения входного сигнала. Дополнительная динамическая погрешность не более 1 % при скорости изменения входного сигнала менее 0,8·105 Па.
При выходе регулируемого параметра за установленное значение регулятор выдает дискретные пневматические сигналы 0 или 1. Давление на выходе регулятора при его срабатывании обычно используется для подачи на исполнительный механизм или для приведения в действие звукового или светового сигнала.
Принципиальная схема позиционного регулятора представлена на рис. 8.2. Принцип действия основан на сравнении двух давлений Рз и Рп.
Задатчик I и постоянный дроссель II предназначены для изменения давления в камере задания элемента сравнения IV. Задатчик I имеет пружину 1 и шариковый клапан 2, через который воздух из камеры В1 сбрасывается в камеру А1 и далее в атмосферу. Вращая ручку задатчика и изменяя усилие натяжения пружины 1, можно настраивать его выходное давление в пределах 0,02…0,14 МПа. Для контроля заданного значения параметра служит манометр М.
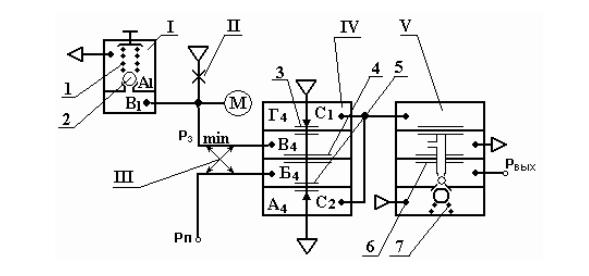
Рис. 8.2. Принципиальная схема регулятора ПР 1.5-М1:
I – задатчик; II – постоянный дроссель; III – переключатель "min-max"; IV – элемент сравнения; V – усилитель мощности; M – манометр; С1, С2 – сопла; 1 – пружина; 2, 7 – шариковый клапан; 3 – 6 – мембраны
Настройка работы регулятора "на минимум" или "на максимум" выполняется поворотом диска III. При настройке регулятора "на максимум" текущее значение измеряемого параметра в виде давления сжатого воздуха Рп поступает в камеру В4 элемента сравнения IV. Заданное давление Рз, установленное задатчиком I, подводится к камере Б4 элемента IV.
При работе регулятора "на минимум" заданное давление Рз подается в камеру В4, а давление от измерительного блока Рп – в камеру Б4. Сравнение происходит в трехмембранном элементе сравнения IV (пневматическом усилителе давления), который состоит из двух пневматических сопротивлений типа "сопло-заслонка" (сопла С1, С2 и шток мембранного блока) и мембранного блока, образующего вместе с корпусом глухие камеры. Мембранный блок содержит три эластичные мембраны, соединенные общим штоком, торцы которого и служат заслонками сопл.
Мембранный блок может перемещаться в вертикальном направлении. Его движение останавливается, когда торец штока упирается в сопло. Эффективные площади мембран 3, 5 равны друг другу и значительно меньше эффективной площади мембраны 4. Камеры А4 и Г4, в которых располагаются сопла, соединяются последовательно и образуют тем самым проточную камеру с двумя управляемыми пневматическими сопротивлениями. К соплу С1 подводится давление питания Рпит, сопло С2 сообщается с атмосферой.
Усилитель мощности предназначен для повторения входного сигнала и усиления его по мощности (расходу воздуха).
В связи с тем, что в таком усилителе мембранный блок собран из грубых (менее чувствительных) мембран и не разгружен от действия посторонних усилий, повторение сигнала осуществляется со значительной статической ошибкой (до 5 % от стандартного диапазона пневматических сигналов). В то же время большие проходные сечения шариковых клапанов обеспечивают усилителю высокие динамические свойства.