

GMA_Microprocess_systems_1
.pdfПри помощи одного из этих каналов микроЭВМ осуществляет контроль только одного мощного потребителя на судне – подруливающего устройства. Второй канал микроЭВМ использует для пуска электроприводов машинного отделения по системе «Stand by».
Подключение подруливающего устройства. Обратимся к рисунку 2.36. Пунктирной линией на схеме ограничены элементы блока
LSG 821.
Рис. 2.36. Схема подключения подруливающего устройства и система «Stand by»
После нажатия на кнопку S, расположенную на посту управления подруливающим устройством, срабатывает реле К2 (установленное там же). При замыкании контакта реле на неинвертирующий вход операционного усилителя DA1 поступает положительный потенциал. Это приводит к появлению на выходе DA1 логической «1», которая поступает на двунаправленный буферный усилитель D8.
Таким образом, срабатывание реле К2 приводит к тому, что на микроЭВМ поступает сигнал о предстоящем подключении подруливающего устройства. МикроЭВМ определяет суммарную мощность нагрузки судовой электростанции с учетом мощности электродвига-
211
теля подруливающего устройства (значение этой мощности записано в памяти микроЭВМ). Затем LSG 822 определяет значение резервной мощности и, если соблюдено условие Ρ < Ρmin, дает команду на запуск резервного дизеля и подключение генератра.
При условии Ρ < Ρmin срабатывает реле К1 периферийной соединительной платы РАР 401.
Реле К1 своим контактом подает питание к реле К3, которое установлено на посту управления подруливающим устройством. Реле К3, в свою очередь, одним из своих контактов шунтирует контакт реле К1, а другим – дает разрешение на пуск электродвигателя.
После пуска электродвигателя срабатывает реле К1 подруливающего устройства (на рисунке оно не показано). Это реле обесточивает реле К2 и подает положительный потенциал на неинвертирующий вход операционного усилителя DA2, что приводит к подаче на микроЭВМ сигнала о включении подруливающего устройства. Таким образом происходит прекращение запроса о включении подруливающего устройства и поступает информация о пуске электродвигателя.
В течение процесса запроса о включении подруливающего устройства происходит мигание светодиода «Bow thruster». После включения подруливающего устройства этот светодиод перестает мигать и горит постоянно.
Одновременно с этим с регистра D3 поступает сигнал на бесконтактный ключ на операционном усилителе DA4, который подключает лампу индикации. Лампа индикации установлена на посту управления подруливающим устройством.
Если в течение процесса запроса блок LSG 822 фиксирует значение Ρ >Ρmin, то дает разрешение на включение подруливающего устройства без подключения резервного генератора.
После срабатывания реле К3 (расположенного на посту управления подруливающим устройством) его состояние не зависит от команд микроЭВМ. При этом отключение любого количества работающих генераторов – в силу случайных и неслучайных факторов
– не приведет к образованию запрета на включение электродвигателя. Возможно даже включение электродвигателя при работе только одного генератора, и это незамедлительно вызывает обесточивание
212
судна. Для устранения такой возможности следует изменить принципиальную схему включения электродвигателя путем введения запрета на его включение при условии отключения любого из работающих генераторов.
Мощность, потребляемая электродвигателем подруливающего устройства, зависит от разворота лопастей, является случайной величиной и имеет переменный характер.
Для того, чтобы предотвратить отключение резервного генератора при малой нагрузке (то есть при Ρ > Ρmin ), блок LSG 822 подключает канал «No DG Stop».
Если значение Ρ > Ρmin сохраняется в течение времени, превышающего продолжительность периода выдержки при остановке дизеля, то появляется следующая индикация: «Stop time finished», «DG stoppage» и «Diesel underload».
Пуск электроприводов машинного отделения по системе «Stand by». После обесточивания судна включение всех необходимых электроприводов машинного отделения происходит автоматически по системе «Stand by».
Схема включения системы «Stand by» аналогична схеме включения подруливающего устройства. Реле К100 подключено к схеме обнаружения обесточивания судна («Blackout») и в нормальном режиме питание на него не поступает (см. рис. 4.7). Клеммы Х1: 2,6 относятся к схеме обнаружения «Blackout» (см. рис. 2.36).
При обесточивании судна реле К100 получает питание. Одним из своих контактов это реле размыкает цепь питания реле времени К101. Реле К101, в свою очередь, замыкая свои контакты, подготавливает цепи запроса и разрешения Х7: 8, 9 LSG 821.
После подключения генератора по системе «Blackout» реле К100 снова обесточивается. При этом одним из своих контактов реле К100 подает питание к реле времени К101. Контакты реле времени К101 размыкают соответствующие цепи после заданного времени выдержки. Это время составляет 150 с.
Другим своим контактом реле К100 замыкает цепь запроса микроЭВМ. Это приводит к подаче сигнала о предстоящем включении станции управления электроприводом машинного отделения.
213
В дальнейшем процесс протекает аналогично процессу подключения подруливающего устройства. После включения второго генератора срабатывает реле К2 периферийной соединительной платы РАР 401. Замыкание контакта реле К2 приводит к подаче питания к реле К102. Последнее, в свою очередь, своим контактом замыкает цепь между клеммами 32, 33 станции управления электроприводами машинного отделения по системе «Stand by». Замыкание клемм 32, 33 приводит к автоматическому включению электроприводов машинного отделения по заданной временной программе. По истечении времени, определенного значением выдержки реле К101, происходит размыкание цепи запроса LSG 822 и цепи питания реле К102.
2.2. БЛОК УПРАВЛЕНИЯ ГЕНЕРАТОРНЫМ АГРЕГАТОМ GMM10
Блок управления генераторным агрегатом GMM10 разработан фирмой System Techniс Nord. Этот блок применяется для контроля, защиты и управления дизельгенератором или валогенератором с частотным управлением. Блок GMM10 контролирует ток генератора, напряжение и частоту генератора и сети, обеспечивает защиту: от обрыва фазы; несимметрии тока в фазах; понижения/повышения напряжения; повышения/понижения частоты; обратной мощности; короткого замыкания. Для управления дизелем к блоку GMM10 с помощью специального интерфейса подключается блок ДМ 010. В этом случае блок GMM10 осуществляет распределение активной нагрузки и синхронизацию генератора с сетью.
Блок управления GMM10 состоит из нескольких плат, описание которых приводится ниже.
Для испытания плат блока GMM10 имеется панель моделирования, состоящая из набора выключателей, резисторов и ламп. При подключении платы моделирования к клеммам GMM10 можно провести испытания всех плат управляющего модуля. Программное обеспечение испытаний находится в микросхеме D2 платы ZKG 403.
214
Центральная плата ZKG-403
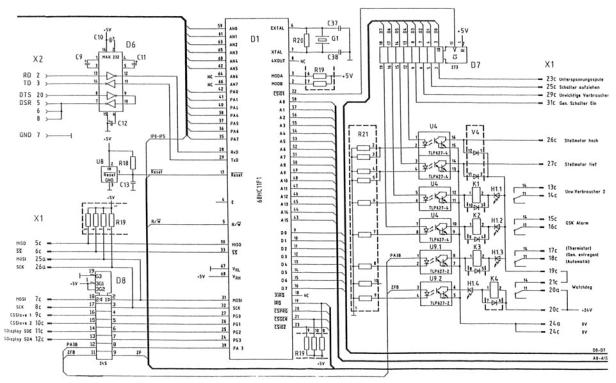
Основным устройством платы является 8-разрядный контроллер МС68НС11F1 фирмы Motorola – микросхема D1 (рис. 2.37).
Контроллерработаетпринапряжениипитания5В,имеетмаксимальную тактовую частоту до 4 МГц. Контроллер содержит внутреннюю память программ ЭСППЗУ емкостью 512 байт, ОЗУ емкостью 1024 байт. Для контроллера предусмотрена возможность подключения внешней памяти 64 Кбайт. Потребляемая мощность составляет 300 мВт.
Контроллер содержит асинхронный и синхронный последовательные порты SCI, SPI, имеет 8-рзрядный АЦП.
Всостав контроллера входит 16-разрядный таймер. Диапазон рабочей температуры – 40 + 85 °С.
Микросхема D7 является регистром. При наличии сигнала на входе С1 в регистре происходит запись двоичного сигнала D0-D7, поступающего с шины данных.
Взависимости от кода этого двоичного сигнала на выходах регистра может появиться логическая «1» (логическая единица), что приводит к появлению сигнала на одном из выходов регистра.
Микросхема D8 представляет двунаправленный буферный усилитель, который соединяет выход контроллера платы ZKG-403 с платой управления и индикации ВАТ-407.
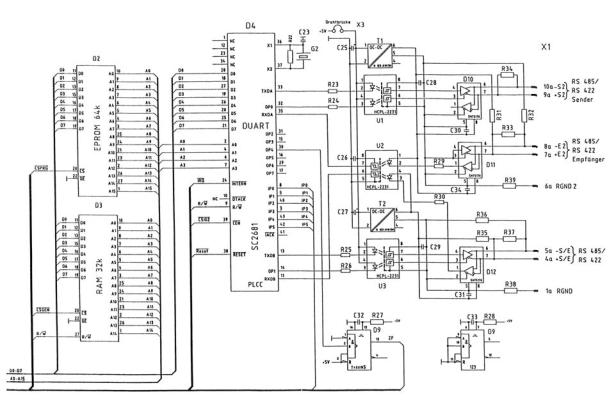
Микросхемы D6 (рис. 2.37-1), D10, D11, D12 (рис. 2.37-2) являют-
ся буферными усилителями интерфейса.
На плате располагаются микросхемы памяти D2-EPROM64K и внешней памяти D3-RAM32K.
Микросхема D4 является универсальным асинхронным приемопередатчиком.
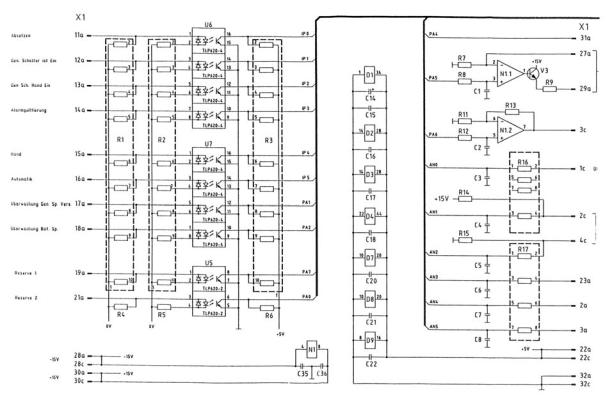
На плате имеется 10 входов, с которых цифровые (дискретные) сигналы через оптоэлектронные пары U5-U7 (рис. 2.37-3) поступают на микросхемы D1 и D4. Цифровые сигналы 1Р0 – 1Р5 подаются на микросхему D4, а цифровые сигналы РАО-РА2, РА7 – микросхему D1.
Шесть цифровых выходов через оптоэлектронные пары U4, U9.1, U9.2 (рис. 2.37-1) управляются регистром D7 и контроллером D1.
Два выхода с открытым коллектором служат для управления исполнительным двигателем дизеля («меньше», «больше»).
215
216
Рис. 2.37-1. Принциальная схема микропроцессорной платы ZKG-403
217
Рис. 2.37-2. Принциальная схема микропроцессорной платы ZKG-403
218
Рис. 2.37-3. Принциальная схема микропроцессорной платы ZKG-403
Другие выходы используются для управления электромагнитными реле К1 – К4:
К1 – реле неответственных потребителей второй ступени; К2 – реле обобщенной аварийной сигнализации; К3 – реле неответственных потребителей первой ступени;
К4 – реле цикла «Watch dog».
Состояние реле контролируется светодиодами Н1.1 – Н1.4, расположенными на фронтальной панели платы.
Плата имеет два аналоговых выхода. Токовый выход 0 – 20 мА на операционном усилителе N1.1 и выход напряжения 0 – 10 В на операционном усилителе N1.2.
Операционные усилители управляются контроллером D1.
На плате имеются шесть аналоговых входов, сигналы которых ANO-AN5 подаются на контроллер D1.
На плате также имеются входы S-передатчика и Е-приемника последовательного интерфейса.
Входы связаны с универсальным асинхронным приемопередатчиком D4 через буферные усилители D10 – D12 и оптоэлектронные пары U1 – U3.
Плата трансформаторов тока SLE-401
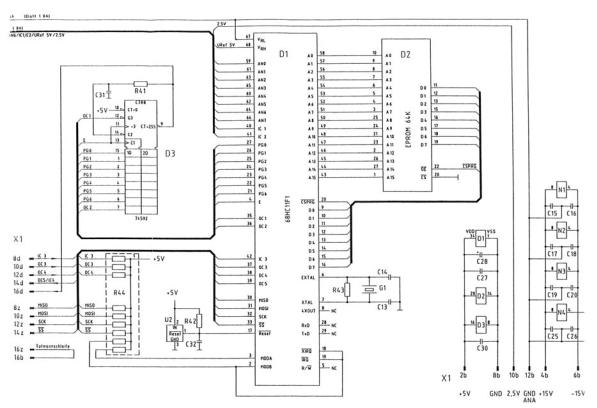
Плата имеет три трансформатора тока 11 – 13 (рис. 2.38), контроллер МС68НС11F1 – микросхема D1, микросхему памяти D2 –EPROM64K, счетчик D3 операционные усилители N1.1, N1.2, N2.1, N2.2, N3.1, N3.2, N4.1, N4.2.
На плате имеются три входа для внешних трансформаторов напряжения: два входа для напряжения генератора и один – для напряжения сети.
Сигналы с трансформаторов тока подаются на операционные усилители N1.1, N1.2, N2.1, с которых сигналы поступают на контроллер D1.
Сигналы с внешних трансформаторов напряжения подаются на фильтры нижних частот ФНЧ на операционных усилителях N3.1 и N3.2. С ФНЧ сигналы подаются на компараторы на операционных усилителях N4.1, N4.2.
219
220
Рис. 2.38-1. Принциальная схема платы трансформаторов тока SLE-401