

GMA_Microprocess_systems_1
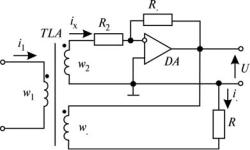
.pdfРис. 1.58. Схема активного измерительного преобразователя «ток–напряжение»
тока TLA также будет равна нулю, что приводит к значительному снижению погрешности.
На рис. 1.59 показана схема замещения преобразователя.
Для определения функциональной зависимости между выходным напряжением Uвых и входным током iвх предварительно найдем значение тока намагничивания i0
Rо.с.
i´вх i´0 r´нам
L´ |
Uвых |
нам |
|
Рис. 1.59. Схема замещения преобразователя
При закорачивании входных электродов DA можно получить следующие выражения:
r2 + pL2s i0´ (p) = i2 (p) ––––––––––;
r´нам + pL´нам
91
i´вх (p) = i´0 (p) + i2 (p) = i2 |
r2 + pL2s |
|
(p) [1 + ––––––––––]. |
||
|
|
r´нам + pL´нам |
|
Ток i2=iо.с, поэтому |
|
i2 |
Uвых (р) |
|
(р) = – –––––––, |
|
|
|
ro.c |
|
|
следовательно, |
|
i′вх |
Uвых (p) r2 + r′нам + p(L′нам + L2s) |
||
(p) = – ––––––– ––––––––––––––––––––, |
|||
|
ro.c |
r′нам + pL′нам |
|
|
отсюда |
|
|
|
w1 |
ro.c |
(r′нам + pL′нам) |
Uвых (p) = – ––– ––––––––––––––– iвх (p), |
|||
|
w2 |
|
R + pL |
где R=r2+r′нам, L=L2s+L′нам. |
|||
|
Передаточная функция преобразователя равна |
||
|
w1 ro.c |
(r′нам |
+ pL′нам) |
W(p) = – –––––––––––––––––, |
|||
|
w2 (R + pL) |
||
|
Пренебрегая сопротивлением в цепи намагничивания, получим |
||
w1ro.c pL′нам
W(р) = – –––––––––––,
w2R(1 + pT)
где T=L/R.
Как видно из выражения для передаточной функции, активный измерительный преобразователь «ток-напряжение» представляет собой реальное дифференцирующее звено.
92

Комплексный коэффициент передачи преобразователя
jw1ro.cωL′нам
W(jω) = ––––––––––––.
w2 R(1 + jωT)
Амплитудно-частотная характеристика имеет следующий вид:
w1 ro.c ωL′нам
A(ω) = ––––––––––––––. w2 R√ 1 + ω2T2
При частоте ƒ≈50 Гц в подкоренном выражении для А(ω) можно пренебречь единицей по сравнению со вторым слагаемым, тогда
w1ro.cL′нам
А(ω) ≈ ––––––––.
w2L
Принимая L′нам=L, получим
w1
A(ω) = ro.c –––. (1.5) w2
С учетом (1.5) в области рабочих частот для выходного сигнала можно написать следующее выражение:
w1
Uвых = ––– ro.c Iex. w2
Трехобмоточный активный преобразователь «ток-напряже- ние»
Для создания магнитной обратной связи трансформатор TLAимеет обмотку обратной связи wо.с. Под действием обмотки wо.с при протекании по ней тока iо.с происходит почти полная компенсация МДС намагничивания магнитопровода, которая обусловливает основную
93
погрешность измерительных трансформаторов тока. Принципиальная схема рассматриваемого преобразователя показана на рис. 1.60.
Рис. 1.60. Трехобмоточный активный преобразователь «ток–напряжение»
Для МДС преобразователя можно написать следующее равенство:
i1w1=iвхw2+iо.сwо.с+Fнам о.с, |
(1.6) |
где Fнам о.с – МДС намагничивания при наличии обратной связи.
Напишем равенство (1.6) для комплексных значений токов
I•1 w1 |
= I•вх w2 + I•o.c wo.c + F•намo.c, |
|
При wо.с=w2 |
|
|
I•1 w1 |
– I•вх w2 = I•o.c wo.c + F•намo.c |
(1.7) |
Ток обмотки обратной связи можно выразить через напряжение
Uн
I•o.c =U•н /Rн.
Без учета падения напряжения в обмотке wо.с можно написать равенство
94
U•вых = –U•н.
Выходное напряжение U•вых = – I•вх Ro.c, поэтому
I• |
Ro.c |
|
|
|
|
= –––– I• . |
|
|
|||
o.c |
R |
н |
вх |
|
|
|
|
|
|
|
|
|
Из (1.5) получим |
|
|||
F• |
= F• |
– –––– I• |
w , |
||
|
|
|
Ro.c |
|
|
намо.с |
|
нам R |
вх |
2 |
|
|
|
|
|
н |
|
где F•нам = I•1 w1 – I•вх w2 – МДС намагничивания без обратной связи.
Таким образом, МДС активного преобразователя меньше МДС измерительного трансформатора тока.
Активные измерительные преобразователи с ОУ имеют погрешности, не превышающие 1 % погрешностей измерительных трансформаторов тока.
Пассивные индукционные преобразователи тока
Для бесконтактного (без разрыва контролируемой цепи) измерения тока используются пассивные индукционные преобразователи. Преобразователь имеет тороидальный сердечник, на котором равномерно намотана обмотка (рис.1.61). Первичной обмоткой преобразователя служит проводник с током.
В преобразователе используется закон электромагнитной индукции
dФ e = – w ––––,
dt
где w – число витков обмотки преобразователя; Ф – поток сердечника преобразователя.
При определении ЭДС вводят некоторые допущения.
95
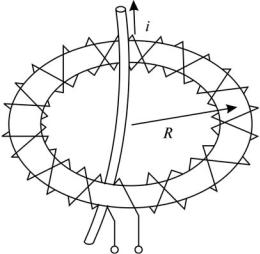
Рис. 1.61. Пассивный индукционный преобразователь тока
Для упрощения считают, что толщина ферромагнитного сердечника намного меньше его диаметра. Обмотка плотно намотана на ферромагнитный сердечник. Площадь поперечного сечения обмотки S постоянна по ее длине.
Магнитная индукция прямолинейного провода с током i равна
i B = μ0μr –––––,2 R
где μ0 – магнитная постоянная;
μr – относительная магнитная проницаемость материала сердечника.
Поэтому ЭДС, наводимая в обмотке преобразователя, определяется выражением
e = – μ |
μ |
S |
di |
(1.8) |
w –––– –––. |
||||
0 |
r |
2 R |
dt |
|
При гармоническом законе изменения измеряемого тока
96
i=Imsinωt;
S
e = – μ0μrwω –––– Im cosωt. 2 R
Длина обмотки l=2πR, поэтому
w
e = – μ0μr ––l ωSIm cosωt
Индукционный преобразователь может работать в режиме холостого хода и в режиме короткого замыкания. Обычно пассивные индукционные преобразователи при измерении токов работают в режиме холостого хода.
Чувствительность преобразователя равна
w
k = μ0μr ––l ωS.
Из полученного выражения следует, что для повышения чувствительности преобразователя, работающего в режиме холостого хода, необходимо увеличить число витков и плотность намотки, использовать ферромагнитный сердечник с большим значением магнитной проницаемости.
Сама обмотка преобразователя образует паразитный виток.
При наличии внешнего переменного магнитного потока, пронизывающего паразитный виток, возникает дополнительная погрешность. Для ее устранения число слоев обмотки делают четным и применяют специальный способ намотки: после намотки слоя второй слой наматывается в другом направлении.
Любое смещение проводника с током относительно геометрического центра преобразователя вызывает пренебрежимо малую погрешность.
В качестве материала сердечника используют магнитодиэлектрик из альсифера.
97
Для режима короткого замыкания можно записать
diвых
e = L ––––– + iвых R, dt
где L и R – индуктивность и сопротивление обмотки преобразователя соответственно.
diвых
При L –––– >>iвыхR с учетом (1.8) получим выражение для тока dt
i |
|
|
w |
i |
|
|
|
|
|
|
|
|
= μ μ S –– ––. |
|
|
|
|
|
|
|
|
||||
вых |
0 r |
l |
L |
|
|
|
|
|
|
|
|
|
|
Индуктивность обмотки преобразователя равна L ≈ μ |
|
μ |
S |
w2 |
|||||||
|
0 |
–, по- |
||||||||||
этому i |
|
1 |
|
|
|
|
|
r |
|
l |
||
|
= ––i. |
di |
|
|
|
|
|
|
|
|||
|
|
вых |
w |
|
>>i |
|
R эквивалентно другому неравенству |
|||||
|
Неравенство L×––вых |
вых |
||||||||||
ωL>>R. |
|
|
dt |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
Таким образом, в режиме короткого замыкания индуктивность обмотки преобразователя должна иметь большое значение, а сопротивление – малое.
Задаваясь соотношением ωL/R=γ, можно выбрать магнитопровод преобразователя и определить минимальное значение витков обмотки, при которых выполняется заданное соотношение.
По сравнению с измерительными трансформаторами тока с магнитопроводом из электротехнической стали пассивные индукционные преобразователи с магнитопроводом из магнитодиэлектрика имеют следующие преимущества: большой линейный диапазон кривой намагничивания магнитодиэлектрика, малые токовые и угловые погрешности, высокая стабильность магнитных характеристик, практическое отсутствие петли гистерезиса и остаточной индукции, насыщение магнитопровода наступает при напряженностях магнитного поля в сотни раз больших, чем у электротехнических сталей.
98
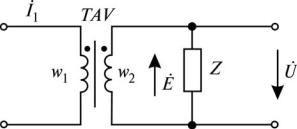
Трансреактор
Первичная обмотка w1 подключается к источнику тока. Трансреактор работает в режиме холостого хода и служит для преобразования тока первичной обмотки I1 в ЭДС вторичной обмотки Е. Схема трансреактора TAV приведена на рис.1.62.
н
Рис. 1.62. Схема трансреактора
Особенностью конструкции трансреактора является наличие воздушного зазора в магнитопроводе, который значительно уменьшает нелинейность характеристики TAV.
Между ЭДС Е и током I1 имеется сдвиг по фазе на угол π⁄2. Потери на перемагничивание магнитопровода приводят к отклонению угла сдвига по фазе от π/2.
При наличии нагрузки напряжение трансреактора U становится меньше Е.
1.3.2. Измерительные преобразователи частоты
Измерительные преобразователи частоты служат для преобразования синусоидальных сигналов с изменяющейся частотой в синусоидальные сигналы с изменяющейся амплитудой или фазой.
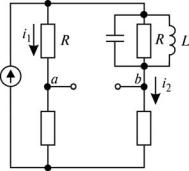
Пассивный измерительный преобразователь
На рис. 1.63 показана схема пассивного измерительного преобразователя изменений частоты в изменение амплитуды.
Найдем операторным методом выражение для выходного напряжения преобразователя:
99
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
e |
|
Uвых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rб |
|
Rб |
|
|
|
Рис. 1.63. Пассивный измерительный преобразователь частоты |
||||||
i |
|
e(p) |
|
|
e(p) |
|
|
|
1 |
(p) = ––––––, i |
2 |
(p) = –––––––––, |
|
||||
|
R + R |
б |
Z(p) + R |
б |
|
|
||
|
|
|
|
|
|
|
||
где Rб – балластный резистор;
pLR |
|
Z(p)= ––––––––––––––– – операторное сопротивление параллельно включенных R, |
|
p2LRC + pL + R |
L, С. |
Выходное напряжение равно разности потенциалов а и б:
[R – Z(p)] Rб Uвых(p)=Ua(p)-Ub(p)=i1(p)R-i2(p)Z(p)= –––––––––––––––– e(p).
[Z(p) + Rб](R + Rб)
Передаточная функция
|
Uвых(p) |
Rб |
R – Z(p) |
|
||
W(p) = ––––––– = –––––– ––––––––– = |
||||||
|
|
e(p) |
|
R + Rб |
Rб + Z(p) |
|
RбR2 |
|
|
p2LC + 1 |
|
|
|
= –––––– –––––––––––––––––––––––. |
||||||
R + R |
б |
RR |
(p2LC + 1) + pL(R + R |
) |
||
|
б |
|
|
б |
|
|
100