

2.5 Классификационные признаки аср
Ввиду большого разнообразия АСР, которые различаются функциональными возможностями, принципами построения и способом конструктивной реализации, не представляет возможным дать законченную классификацию автоматических систем регулирования. Поэтому рассмотрим лишь основные, наиболее характерные классификационные признаки этих систем.
Первый признак, определяющий принцип построения АСР, – это наличие в них явно выраженной главной обратной связи. По этому признаку системы разделяют на замкнутые и разомкнутые.
Второй признак, определяющий назначение систем или характер изменения управляющего воздействия в них. Иными словами – характер алгоритма функционирования АСР.
Алгоритм – предписание, определяющее содержание и последовательность операций, переводящих исходные данные в искомый результат. Алгоритм обладает свойствами: а) определенности; б) массовости; в) результативности.
Под определенностью алгоритма понимают невозможность его двоякого выполнения, не оставляющую место для произвола.
Под массовостью – возможность применения алгоритма для различных вариантов исходных данных, т. е. возможность решать любую задачу некоторого класса.
Под результативностью – существование таких вариантов исходных данных, для которых, после конечного числа элементарных операций, выполнение алгоритма заканчивается и дает искомый результат, и отсутствие таких вариантов, для которых процесс выполнения алгоритма приводит к неправильному результату.
Существенными особенностями алгоритма являются также дискретность определяемого им процесса, т. е. его расчленение на отдельные последовательные шаги, а также простота операций, выполняемых на каждом шагу.
По характеру алгоритма функционирования АСР подразделяют на системы автоматической стабилизации, системы программного регулирования и следящие системы.
Системами автоматической стабилизации (иногда их называют просто автоматическими системами регулирования) называются АСР, предназначенные для поддержания постоянного значения регулируемой величины с допустимой ошибкой регулирования независимо от действующих возмущений. Пример такой АСР представлен на рис. 2, б. В черной металлургии системами автоматической стабилизации являются АСР, предназначенные для регулирования температуры, давления, расхода, уровня, химического состава и т. п., например температуры рабочего пространства нагревательной печи прокатного стана, уровня металла в кристаллизаторе МНЛЗ.
Системами программного регулирования называются АСР, автоматически изменяющие регулируемую величину в соответствии с определенным заранее заданным законом, являющимся функцией времени. Необходимые изменения регулируемой величины во времени обеспечиваются в таких системах изменением задающего воздействия по строго определенной программе. Примером такой АСР может являться система регулирования температурного режима в термических печах при термической обработке металла по программе: нагрев до заданной температуры за определенное время, выдержка в течение заданного времени при этой температуре, охлаждение до определенной температуры в течение заданного времени и т. д.
Следящими системами называются системы, изменяющие регулируемую величину по произвольному закону в зависимости от неизвестной заранее какой-либо другой переменной величины на входе автоматической системы. В этих системах регулируемая (ведомая) величина с той или иной степенью точности воспроизводит в определенном масштабе все изменения входной (ведущей) величины, т. е. «следит» за ней. В следящих АСР ведущая величина является задающей величиной. Примером следящей системы является АСР газосмесительной станции, позволяющей получать газовую смесь заданного соотношения для топливо-потребляющих агрегатов. На рис. 17 представлена схема так называемой двухдроссельной газосмесительной станции. При изменении потребления смешанного газа изменяется его давление, вследствие чего благодаря воздействию комплекта аппаратуры 1а – 1д изменяется положение дросселя А на газопроводе ведущего газа. Заданное соотношение газов в смеси поддерживают с помощью схемы регулирования соотношений двух величин. Расходы газов измеряют с помощью диафрагм 2а–За, дифманометров 2б и 3б и вторичных приборов 2в и 3в. Заданное значение величины соотношения устанавливают задатчиком 3д. Разность между текущим и заданным значениями соотношения поступает на вход регулятора 3г, который через усилитель 3е воздействует на исполнительный механизм 3ж, связанный с регулирующим дросселем Б на газопроводе ведомого газа.

Рисунок 17 – Пример следящей системы (двухдроссельная АСР газосмесительной станции)
Следует отметить, что подобное разделение АСР в определенной мере условно, так как нередко функции одних и тех же систем при различных режимах работы не одинаковы, кроме того, системы всех трех видов испытывают внешние возмущающие воздействия.
Третий признак – по способности АСР поддерживать с определенной степенью точности значение регулируемой величины. По этому признаку различают статические и астатические системы.
Статической АСР называют такую систему, в которой принципиально невозможно поддерживать одно и то же значение регулируемой величины во всех установившихся режимах при сохранении неизменной настройки системы. Остáточную ошибку в такой системе называют статизмом. При статическом регулировании величина регулирующего воздействия однозначно связана с отклонением регулируемого параметра от заданного значения. Таким образом, равновесие системы для разных нагрузок наступает при различных значениях регулируемого параметра, лежащих в заранее заданных пределах (под равновесным состоянием понимают установившееся состояние АСР, характеризующееся тем, что регулируемая величина сохраняет постоянное значение, если возмущение отсутствует и регулирующий орган не перемещается). Пример статической АСР приведен на рис. 5, б. Таким образом, статической АСР является система, в которой при постоянном внешнем воздействии устанавливается отличное от нуля значение ошибки регулирования.
Астатической АСР называется такая система, в которой по окончании переходного процесса регулируемая величина принимает всегда одно и то же значение и не зависит от величины возмущающего воздействия. Таким образом, в астатической системе статизм всегда равен нулю. Астатическая система находится в равновесии при любом заданном значении регулируемого параметра. Пример астатической АСР приведен на рис. 8. Равновесие такой системы возможно лишь при вполне определенном значении регулируемой величины – угловой скорости. Таким образом, при любой нагрузке установившееся значение регулируемого параметра будет одинаковым. С учетом определения статической АСР можно сказать, что астатической АСР является система, в которой при постоянном воздействии значение ошибки регулирования устанавливается равным нулю.
Рассмотрим статические и астатические АСР по отношению к задающему и возмущающему воздействиям.
По отношению к задающему (управляющему) воздействию систему принято называть статической, если при любом постоянном задающем воздействии остáточная ошибка регулирования не равна нулю и зависит от значения приложенного воздействия; в том случае, если при любом постоянном задающем воздействии остáточная ошибка регулирования равна нулю, система называется астатической.
По отношению к возмущающему воздействию систему называют статической, если при постоянной величине возмущающего воздействия регулируемая величина будет иметь в установившемся состоянии некоторое отклонение от заданного значения (при этом величина остáточного отклонения регулируемой величины зависит от величины приложенного возмущающего воздействия); если же при различных постоянных значениях возмущающего воздействия по окончании переходного процесса отклонение регулируемой величины от заданного значения будет равно нулю, то такая система по отношению к возмущающим воздействиям называется астатической.
Четвертый признак – по виду функциональной связи между входными и выходными величинами элементов, входящих в АСР. По этому признаку различают системы непрерывного и прерывистого (дискретного) действия.
АСР непрерывного действия – системы, в которых непрерывному изменению входных величин всех элементов соответствует непрерывное изменение выходных величин этих элементов.
При этом закон изменения выходной величины во времени может быть произвольным, в зависимости от формы изменения входной величины и от вида уравнения динамики (или характеристики) элемента (рис. 18). Пример АСР приведен на рис. 16 .
АСР прерывистого (дискретного) действия называют системы, в которых непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует прерывистое (дискретное) изменение выходной величины этого элемента.
В АСР дискретного действия при непрерывном изменении входной величины соответствующие элементы формируют изменение выходной величины в виде скачка или в виде импульса. В зависимости от технических особенностей дискретные АСР подразделяют на системы с релейным элементом (или релейные) и импульсные.
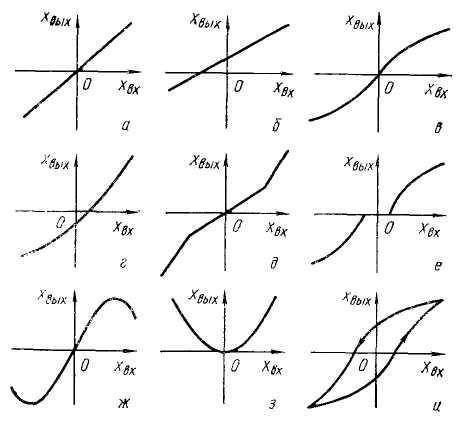
Рисунок 18 – Примеры непрерывных характеристик
Релейной АСР называют такую систему, в которой хотя бы в одном элементе при непрерывном изменении входной величины выходная величина в некоторых точках процесса, зависящих от значения входной величины, изменяется скачком. Такой элемент называется релейным элементом.
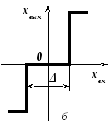


Рисунок 19 – Характеристики релейных элементов.
a – без зоны неоднозначности; б – с зоной неоднозначности Δ; в – с зоной неоднозначности Δ и гистерезисом h
Отличительной особенностью релейного элемента является то, что сигнал на его выходе хвых остается постоянным до определенного значения хвх входного сигнала, а затем резко (скачком) изменяется, при этом выходная величина не зависит от величины входного сигнала.
Примеры релейных характеристик представлены на рис. 19. Знак выходного сигнала релейного элемента определяется знаком входного сигнала.
В релейных АСР используют контактные электромагнитные реле различных типов, а также бесконтактные устройства дискретного действия. Так как в релейной системе в процессе отработки выходной величины основная связь периодически разрывается, то принято говорить, что такие системы работают по принципу «включено – выключено», или «ДА – НЕТ».
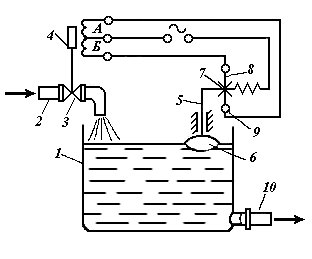
На рис. 20 представлен пример двухпозиционной релейной АСР.
В объект регулирования – бак 1 по трубе 2 поступает вода, а по трубе 10 она подается потребителю. На поверхности жидкости находится поплавок 6, который
|
|
штоком 5 соединен с подвижным электроконтактом 7. Контакт 7 при перемещении может замыкаться на неподвижные контакты 8 и 9. При повышении уровня воды относительно заданного значения контакт 7 замкнется на контакт 8 и под напряжением окажется обмотка Б исполнительного механизма 4. Регулирующий орган 3 закрывается. При понижении уровня относительно заданного значения контакт 7 замыкается на контакт 9 и под напряжением окажется обмотка А; регулирующий орган 3 открывается. |
|
Рисунок 20 – Принципиальная схема релейной АСР уровня |
Импульсные АСР являются системами периодического дискретного действия, в которых непрерывный сигнал управления через определенные равные промежутки времени принудительно прерывается особым устройством, которое называется импульсным элементом.
В таких АСР импульсный элемент замыкает систему лишь на малые промежутки времени с определенным интервалом между импульсами. Иными словами импульсный элемент преобразует непрерывную входную величину в последовательность модулированных импульсов, т. е. в импульсы, параметры которых изменяются в соответствии с изменением величины на входе импульсного элемента.
Импульсы, модулируемые этим элементом, характеризуются величиной модулируемого параметра импульса (амплитудой, длительностью, периодом повторения, полярностью, сдвигом или частотой). Параметры импульсов определяют только в некоторые дискретные равноотстоящие моменты времени, которые называют моментами съема:
t = nTp (2)
где Tp – интервал регулирования или период следования импульсов;
п – целое положительное число (п = 1, 2, 3...)
|
|
В зависимости от того, какой из модулированных параметров импульсов является переменным, различают четыре типа импульсных элементов:
|
|
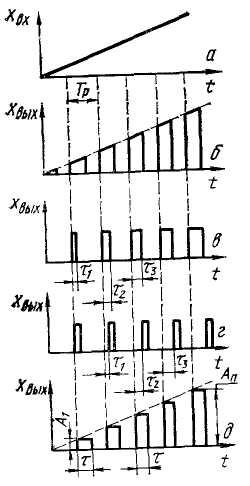
Рисунок 21 – Примеры входных и выходных сигналов импульсных элементов различных типов: а – сигнал на входе; б – сигнал на выходе импульсного элемента с амплитудно-импульсной модуляцией второго рода; в – сигнал на выходе импульсного элемента с широтно-импульсной модуляцией; г – сигнал на выходе импульсного элемента с время-импульсной модуляцией, д – сигнал на выходе импульсного элемента с амплитудно-импульсной модуляцией первого рода |
В импульсных АСР используются механические, электромеханические и электронные импульсные элементы.
|
|
Принципиальная схема импульсной АСР температуры приведена на рис. 22, а. Необходимо поддерживать постоянную температуру объекта, охлаждаемого воздухом. Регулирующим органом являются шторки, угловое положение 4 которых определяет собой количество подаваемого воздуха. Измерительное устройство регулятора состоит из термометра сопротивления 1, включенного в качестве одного из плеч измерительного моста 2. Мост 2 настраивают таким образом, что при заданной температуре, которую надо поддерживать неизменной, ток в диагонали моста отсутствует и стрелка 3 неподвижна. Таким |
|
Рисунок 22 – Принципиальная схема импульсной АСР температуры |
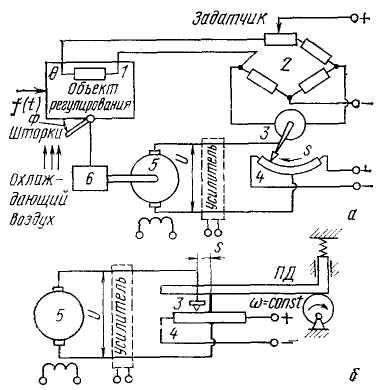
образом, перемещение s стрелки 3 пропорционально отклонению температуры от заданного значения.
Стрелка скользит по потенциометру 4, управляющему через усилитель работой двигателя 5, который через редуктор 6 вращает шторки.
На рис. 22, б изображен вид на стрелку измерительного моста с торца (с носика). Носик стрелки движется вправо и влево свободно, не прикасаясь к обмотке потенциометра поэтому электрическая цепь, связанная с усилителем, разорвана. Над стрелкой помещается падающая дужка ПД, опирающаяся на эксцентрик, свободно вращающийся с постоянной угловой скоростью ω. Под действием равномерно вращающегося эксцентрика падающая дужка периодически прижимает стрелку 3 на короткие промежутки времени к обмотке потенциометра 4. Таким образом, при непрерывном перемещении s стрелки напряжение U, питающее цепь якоря двигателя, будет подаваться с потенциометра в виде коротких импульсов.
Постоянный период чередования импульсов Т задается системе принудительно извне и определяется значением угловой скорости ω вращения эксцентрика независимым от данной АСР приводом. Длительность импульсов τ также постоянна.
Поскольку перемещение s стрелки 3 пропорционально отклонению регулируемой температуры, то таким образом получается импульсная зависимость перемещения регулирующего органа от отклонения регулируемой величины.
Всякое устройство, которое осуществляет преобразование непрерывной величины (в нашем случае s) в дискретную импульсную величину (U), т.е. в последовательность импульсов с постоянным периодом, называют импульсным звеном или импульсным элементом. В рассмотренном примере было показано механическое импульсное звено с электрическим выходом. Вообще в других АСР оно может реализовываться и чисто электрическими или электронными устройствами, особенно в тех случаях, когда требуется малый период Т чередования импульсов.
Основной смысл введения импульсного звена в АСР заключается в освобождении измерительного устройства регулятора от нагрузки на его выходе. В самом деле, если бы в регулирующем устройстве, представленном на рис. 22, отсутствовала бы падающая дужка, то стрелка 3 измерительного моста имела бы значительную механическую нагрузку за счет трения об обмотку потенциометра. Это существенно снизило бы чувствительность измерительной системы, а значит, и всего регулятора к малым отклонениям регулируемой величины. Таким образом, введение импульсного звена позволяет применять в конструкции регулятора обычные стрелочные приборы, без ухудшения точности измерения отклонения регулируемой величины, т. е. улучшает реакцию регулятора на это отклонение с обеспечением в то же время достаточной мощности регулирующего воздействия на объект. Кроме того, при импульсном регулировании уменьшается расход энергии на привод регулирующего органа, а также имеется возможность подключать к одному и тому же прибору несколько последовательно действующих чувствительных элементов и исполнительных механизмов, что обеспечивает компактность сложных АСР. К дискретным АСР относятся также системы с цифровыми вычислительными устройствами, которые выдают результаты вычисления на выходе дискретно, через определенные промежутки времени, необходимые для производства вычислений в виде чисел для отдельных дискретных числовых значений входной величины.
Н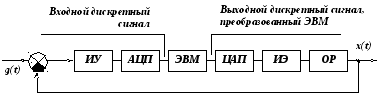 а
рис. 23 приведена функциональная схема
цифровой АСР, в контур которой включена
электронно-вычислительная машина ЭВМ,
которая выполняет операции над входным
дискретным сигналом. Для согласования
непрерывной части системы с ЭВМ или для
перехода от непрерывной формы представления
сигнала к цифровой применяют
аналого-цифровые преобразователи (АЦП).
Для перехода от дискретного сигнала к
непрерывному применяются цифро-аналоговые
преобразователи (ЦАП). Остальные элементы
этой системы – измерительное устройствоИУ,
исполнительный
элемент ИЭ,
объект
регулирования ОР
–
обычного
исполнения и используют непрерывные
сигналы.
а
рис. 23 приведена функциональная схема
цифровой АСР, в контур которой включена
электронно-вычислительная машина ЭВМ,
которая выполняет операции над входным
дискретным сигналом. Для согласования
непрерывной части системы с ЭВМ или для
перехода от непрерывной формы представления
сигнала к цифровой применяют
аналого-цифровые преобразователи (АЦП).
Для перехода от дискретного сигнала к
непрерывному применяются цифро-аналоговые
преобразователи (ЦАП). Остальные элементы
этой системы – измерительное устройствоИУ,
исполнительный
элемент ИЭ,
объект
регулирования ОР
–
обычного
исполнения и используют непрерывные
сигналы.
Рисунок 23 – Функциональная схема цифровой АСР
Темп работы вычислительного устройства подбирают таким образом, чтобы дискретность его действия не влияла на работу системы в целом, т.е. чтобы время операции вычисления (запаздывания) было небольшим, а частота следования управляющих импульсов была достаточно высокой. Учитывая высокий темп работы современных цифровых вычислительных устройств (по сравнению с инерционностью системы), в большинстве случаев можно проводить расчеты таких систем как непрерывных.
Пятый признак – по виду контролируемых изменений своих свойств: не приспосабливающиеся системы и приспосабливающиеся или адаптивные (от лат. adaptio – приспособление, термин заимствован из биологии, где адаптацией называется приспособление организма к изменяющейся среде с целью сохранения его жизнеспособности и жизнедеятельности). Адаптивные АСР предназначаются для работы в непрерывно изменяющихся условиях (изменении качества материалов, величины потерь, динамики объекта регулирования вследствие значительных изменений параметров объекта и т.п.), т. е. в тех случаях, когда описанные выше принципы управления по разомкнутому циклу, замкнутому циклу (с обратной связью) или компенсации возмущений из-за значительных изменений параметров объекта становятся не достаточными, а контуры системы управления с неизменной настройкой – не пригодными. Адаптивные системы в состоянии учитывать эти изменения и приспосабливаться к ним, они автоматически изменяют свои параметры – входные величины, задающие воздействия или даже структуру (поскольку изменять параметры объекта обычно технически трудно), чтобы во всех условиях удовлетворять определенным требованиям.
Адаптивную систему управления, в которой на основе информации о внешних воздействиях, динамических характеристиках объекта или системы, получаемой в процессе работы, осуществляется активное изменение параметров регулятора для обеспечения работы системы, принято называть самонастраивающейся системой (СНС).
Адаптивную систему управления, позволяющую оптимизировать систему и характеризующуюся наличием процесса формирования алгоритма управления, который связан не только с изменением параметров, но и с отысканием структуры регулятора, называют само организующейся системой (СОС).
СОС в своей первоначальной структуре представляет собой набор элементов, связанных между собой случайным образом. В дальнейшем при внешних возмущениях в таких системах образуются устойчивые отрицательные и положительные обратные связи.
СНС обычно включает, как минимум, два контура – основной контур, реализующий один из «обычных» принципов управления (по разомкнутому циклу, замкнутому циклу с обратной связью или компенсации возмущений), и контур адаптации, который называют контуром настройки параметров. Пример функциональной схемы СНС с разомкнутым контуром адаптации представлен на рисунке 24, а. Основной контур, состоящий из объекта регулирования 1 и регулятора 2, представляет собой замкнутую АСР (АСР с обратной связью). В контур адаптации входит устройство, осуществляющее перестройку параметров, на вход которого подается только информация о внешней среде и воздействиях на объект. В рассматриваемом примере это управляющее воздействие со стороны регулятора U(t) и извне g(t), а также возмущающие воздействия f(t). В СНС с замкнутым контуром адаптации (см. рисунок 24, б), кроме этих воздействий (или вместо них), в устройство адаптации вводится информация о результатах регулирующих воздействий, т. е. о выходных координатах или о переменных состояниях объекта x(t).
Для СНС с разомкнутым контуром адаптации характерно более быстрое завершение процесса адаптации, однако их точность меньше точности, достигаемой в системах с замкнутым контуром.
Устройство адаптации оценивает характер изменения параметров и затем вырабатывает воздействие y(t) на перестройку параметров основного контура. Для этого устройству адаптации задается некоторая мера качества Q, которая в общем случае может быть функцией, зависящей от координат и параметров системы х, U, g, f, у, t.
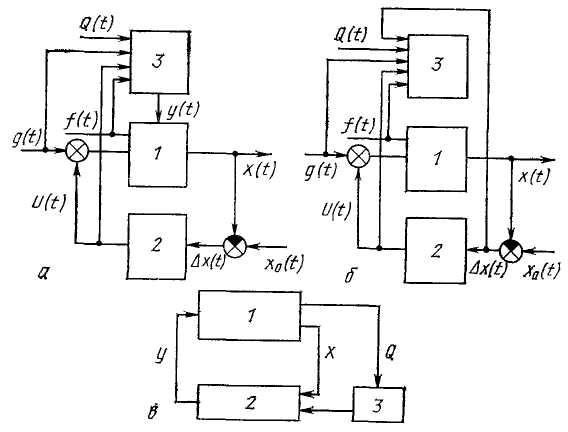
Рисунок 24 – Самонастраивающиеся системы
а, б – принципиальные схемы самонастраивающейся системы; в – принципиальная схема экстремальной системы; 1 – объект регулирования; 2– регулятор стабилизации; 3 – экстремальный регулятор
Обычно качество задается или в виде области, внутри которой должно находиться фактическое значение g, или в виде функции, экстремум которой требуется обеспечить в результате управления. Адаптивные системы, стремящиеся удержать значение Q в заданной области, называют системами со стабилизацией показателя качества. Например, системы, в которых задача адаптации сводится к обеспечению Q, не больше заданного (Q ≤ Qзад). Системы, задача адаптации в которых сводится к обеспечению экстремума показателя качества (например, Q = Qmin), называют системами с оптимизацией показателя качества.
Требования этих двух задач означают минимальные затраты мощности при реализации оптимального закона управления, минимальное время переходных процессов в системе, независимость динамики управления от переменных параметров объекта управления и т. п.
В самонастраивающейся системе анализ состояния системы в конкретный момент времени не позволяет определить, какие именно изменения параметров необходимы для того, чтобы добиться требуемого результата. Для решения задачи необходимо накапливать информацию в процессе работы. Поэтому в таких системах обычно производится автоматический поиск необходимых значений переменных параметров системы. При автоматическом поиске сначала проводят пробное изменение параметров, затем анализируются результаты этого изменения и определяется направление рабочего изменения этих параметров, которое позволит получить требуемые характеристики системы.
Самонастраивающаяся автоматическая система регулирования, в которой регулирующие воздействия вырабатываются с помощью пробных воздействий автоматического регулирующего устройства на объект и анализа результатов пробных воздействий, называется поисковой системой (или АСР с пробными воздействиями).
К СНС с поиском и оптимизацией показателя качества относятся и системы экстремального регулирования.
Экстремальные системы находят и поддерживают такие значения своих регулирующих воздействий на объект регулирования, при которых некоторая регулируемая (выходная) величина системы Q, являющаяся функцией одной или нескольких входных величин, достигает наибольшего или наименьшего значения (экстремума). Эта функция зависит не только от контролируемых величин, но и от неконтролируемых параметров системы и времени t. Поэтому она не является постоянной и заранее известной.
Принципиальная схема системы экстремального регулирования приведена на рис. 24, в, б. Оптимизируемая величина Q является функцией регулируемой величины х; задача экстремальной системы заключается в поддержании Q = Q(x) =max. Если это требование не выполняется, то экстремальный регулятор 3 изменяет регулятору стабилизации 2 заданное значение регулируемой величины хзад объекта регулирования таким образом, чтобы было достигнуто максимальное значение Q.
Так как характер экстремальной зависимости регулируемой величины заранее неизвестен, то экстремальные системы функционируют по принципу «автоматического поиска». Например, на вход объекта регулирования экстремальным регулятором подаются специальные пробные воздействия, анализируется реакция объекта на эти воздействия и в том случае, когда при определенных воздействиях регулируемая величина приближается к экстремуму, в этом направлении на объект подаются рабочие регулирующие воздействия. При переходе регулируемой величины через экстремум происходит реверс регулирующего воздействия, после чего система начинает совершать колебательные движения вокруг экстремума.
Пробное воздействие на переменные параметры может производиться непрерывно, так называемый «непрерывный поиск» (и тогда при достижении экстремума начинается «рыскание»), или периодически, причем при достижении экстремума пробные воздействия прекращаются.
На рис. 25, а приведен пример экстремальной системы регулирования сжигания топлива в термической печи. Система включает три контура регулирования: стабилизации температуры в рабочем пространстве печи (регулятор Pt); регулирования соотношения расходов топлива и воздуха (регулятор Рс); оптимизации (экстремальный регулятор ЭР).
Регулятор Pt стабилизирует температуру в рабочем пространстве путем изменения расхода топлива. Температура контролируется датчиком Дt. сравнивается в регуляторе с заданным значением ТЗ, после чего сигнал рассогласования преобразуется в регуляторе в команду управления, поступающую на исполнительный механизм Пр, который изменяет положение регулирующего органа на трубопроводе топлива к горелке.
Регулятор соотношения поддерживает расход воздуха yв, измеряемый датчиком Др2 в функции расхода топлива yт, измеряемого датчиком Др1.
Характеристики расхода топлива при условии стабилизации температуры в рабочем пространстве имеют вид плавных кривых (рис. 25, б) с единственным экстремумом, положение которого зависит от соотношения расхода воздуха к расходу топлива k = yB/yт (коэффициент k называют коэффициентом избытка воздуха) и вида топлива (кривые 1–3).
|
|
В зависимости от температуры подаваемого воздуха, его потерь по тракту или дополнительных присосов фактический коэффициент избытка воздуха, участвующего в горении, изменяется. Горение может стать неэкономичным, и тогда необходимо изменять заданное соотношение расходов топлива и воздуха. Целью оптимизации процесса сжигания топлива является минимизация расхода топлива при условии стабилизации заданной температуры в рабочем пространстве. Как видно из рис. 25, б, регулируемым параметром контура оптимизации является соотношение между расходами воздуха и топлива. При малых значениях k топливо полностью не сгорает, и поэтому расход его для поддержания заданной температуры возрастает. Если значение k велико, то часть тепла |
|
Рисунок 25 – Экстремальная система регулирования сжигания топлива в термической печи: а – функциональная схема; б – статические характеристики расхода топлива при постоянной температуре в камере сгорания |
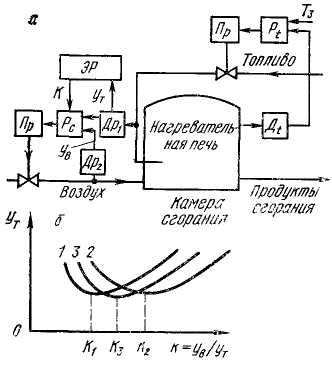
уносится излишне большим потоком воздуха, что также приводит к возрастанию расхода топлива. Оптимальное значение k определяется в экстремальном регуляторе путем пошаговой процедуры поиска экстремума функции yт(k). Для этого параметру k в регуляторе соотношения дается приращение Δk и измеряется датчиком расхода Др1 вызванный этим изменением расход топлива Δy1(Δk). Если это приращение отрицательное, то при следующем шаге расход топлива изменяется в прежнем направлении. В противном случае направление поиска изменяется на противоположное (реверсируется). После выполнения ряда шагов система настраивается на оптимальное значение соотношения топливо – воздух в зависимости от вида топлива и совершает колебательные движения вокруг указанной точки экстремума.
В представленные на рис. 24, а, б СНС более общего вида, предназначенные для поддержания требуемого состояния xo(t) и экстремума показателя Q, рассмотренная выше экстремальная система поиска войдет как составной элемент в контур адаптации, присоединяемый к основному контуру.
Основной трудностью при реализации поисковых СНС является недопустимость подачи на вход значительных пробных воздействий, так как они могут нарушать основной процесс регулирования. Подача же малых пробных воздействий затрудняет выделение получающейся реакции системы на фоне помех и шумов.
В последнее время получают все большее распространение бес поисковые самонастраивающиеся системы (БСНС), в которых поиск заданного или экстремального значения критерия качества выполняется заранее до начала работы системы по динамическому эталону основного контура управления, называемого эталонной моделью.
В общем случае моделью называют условный образ объекта исследования, конструируемый исследователем таким образом, чтобы отобразить существенные для исследования характеристики объекта (свойства, взаимосвязи, параметры) с целью его изучения.
Различают физические и абстрактные модели.
К физическим моделям относятся установки, устройства или приспособления, воспроизводящие в том же или в другом масштабе исследуемый объект при сохранении физического подобия процессов модели процессам объекта исследования (например, макеты приборов, сооружений, механизмов и машин).
В абстрактных моделях описание объектов или явлений выполняется на каком-нибудь языке. В качестве языков моделирования используют, например, естественный язык, язык чертежей и схем, математический язык. Систему математических выражений, описывающих характеристики объекта или явления, называют математической моделью.
|
|
Рассмотрим это на примере. На рис. 26, а представлена схема измерения расхода жидкости (воды) с помощью измерительной диафрагмы 1 и U-образного дифманометра 3 с ртутным заполнением типа ДТ-2. В установившемся режиме перепад давления в месте установки диафрагмы уравновешивается противодавлением столба ртути ΔН. При изменении расхода жидкости и соответственно перепада давления на диафрагме вода в импульсном трубопроводе 2 и ртуть в дифманометре 3 начинают перемещаться таким образом, что в новом установившемся состоянии перепад на диафрагме опять будет уравновешен противодавлением столба ртути. |
|
Рисунок 26 – Примеры составления моделей: а – схема измерения расхода; б – механическая модель измерительной системы; в – электрическая модель измерительной системы |
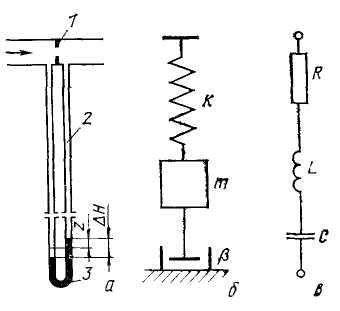
Жидкость перемещается вследствие силы, вызванной наличием перепада давлений на диафрагме. Во время переходного процесса этой силе противодействуют:
а) силы инерции, вызванные ускорением массы жидкости в измерительной системе (силы инерции определяются по второму закону Ньютона);
б) силы трения, определяемые движением жидкости в импульсном трубопроводе (по закону Пуазейля);
в) сила противодавления столба ртути (эта сила пропорциональна перемещению столба ртути z, аналогично тому, как сила пружины пропорциональна сжатию).
При свободном (без воздействия извне) движении массы жидкости или газа в трубопроводе в совокупности с подвижной системой регулятора или прибора возникают только силы инерции mz”, силы трения βz’ и силы упругого противодействия kz. Следовательно, свободное движение всего устройства описывается дифференциальным уравнением
![]() (3)
(3)
где т – коэффициент массы;
Р – коэффициент трения;
k – коэффициент сил упругого противодействия;
z”, z’, z – соответственно ускорение, скорость и перемещение среды в чувствительном элементе регулятора или измерительном приборе.
Таким же уравнением описывается свободное движение массы, подвешенной на пружине и обладающей трением (рис. 26, б).
Таким образом, устройство, показанное на рис. 26, б, можно рассматривать как механическую модель импульсного трубопровода совместно с подключенным к нему измерительным прибором или чувствительным элементом регулятора.
Дифференциальное уравнение электрической системы, состоящей из последовательно включенных сопротивления, индуктивности и емкости, имеет вид:
![]() (4)
(4)
где L – индуктивность;
R – омическое сопротивление;
С – емкость;
i – сила тока;
Сопоставляя выражения (3) и (4), можно применить аналогию соответствия: т и L – коэффициенты массы и индуктивности; β и R – коэффициенты трения и омического сопротивления; k и 1/С – коэффициент сил упругого противодействия и обратная величина электрической емкости; z и i – перемещение среды в приборе и величина электрического тока.
Таким образом, электрическую систему, показанную на рис. 26, в, можно рассматривать как электрическую модель импульсного трубопровода совместно с подключенным к нему измерительным прибором или чувствительным элементом регулятора.
Построение эталонной модели требует предварительного изучения динамических свойств системы. Чем ближе будут свойства модели к свойствам оригинала, тем легче будет выполнить и процесс адаптации.
Осуществление поиска модели объекта регулирования позволяет ускорить темп процесса адаптации, поскольку при работе модели в ускоренном режиме изменение параметров модели позволяет быстро найти условие, при котором величина Q оптимальна, и перенести затем этот результат на реальный объект. Управление вырабатывают далее таким образом, чтобы выходы x(t) реального объекта и выходы xм(t) его модели были достаточно близки друг к другу.
Шестой признак – по виду закономерности изменений сигналов. По этому признаку АСР подразделяются на линейные и нелинейные.
Линейными АСР называются такие системы, динамика всех элементов которых вполне описывается линейными уравнениями (алгебраическими или дифференциальными). Для этого необходимо прежде всего, чтобы зависимости между выходной и входной величинами всех элементов системы были линейными, т. е. имели вид прямой линии (см. рис. 18, а, б).
В линейных АСР процесс, происходящий под влиянием нескольких воздействий, определяется суммой процессов, вызываемых каждым из этих воздействий на систему в отдельности. Положение, при котором совместный эффект нескольких воздействий равен сумме эффектов, вызываемых каждым из воздействий в отдельности, называется принципом суперпозиции, являющимся частным случаем выражения единого физического закона о независимости действия сил. Таким образом, характерной особенностью линейных АСР является принцип суперпозиции. Процессы в линейных АСР с достаточной точностью математически описываются линейными дифференциальными уравнениями.
Нелинейными АСР называются такие системы, в которых хотя бы в одном элементе нарушается линейность зависимости между входной и выходной величинами или же происходит любое другое нарушение линейности уравнений динамики элемента (произведение переменных или их производных, корень, квадрат или более высокая степень переменной, любая другая нелинейная связь переменных и их производных).
Таким образом, к нелинейным системам, в частности, относятся все системы, в элементах которых имеются характеристики любого из видов, представленных на рис. 18, в–и. К нелинейным АСР относятся и все системы релейного действия (см. рис. 19). Нелинейными могут быть импульсные и цифровые АСР, если в них где-либо нарушается линейность уравнений динамики (в цифровых АСР это связано, в частности, с квантованием сигнала по уровню).
К нелинейным АСР не применим принцип суперпозиции.
Седьмой признак – по количеству замкнутых контуров регулирования. Системы, содержащие один замкнутый контур регулирования, называются одноконтурными АСР. Системы с несколькими замкнутыми контурами называются многоконтурными АСР (см. рис. 27). Такие системы, кроме главной обратной связи, содержат параллельные или местные обратные связи.
Многоконтурные АСР с несколькими регулируемыми величинами в свою очередь подразделяются на системы несвязанного и связанного регулирования.
Системами несвязанного регулирования называют многоконтурные АСР, в которых различные регулируемые величины одного и того же управляемого технологического процесса (или соответственно различные регуляторы) не имеют непосредственной связи между собой и могут взаимодействовать друг с другом только через общий для них объект регулирования. Такие системы подразделяются также на зависимые и независимые.
На рис. 27, в показана зависимая многоконтурная система несвязанного регулирования, в которой изменение одной из регулируемых величин х1 управляемого процесса вызывает изменение другой регулируемой величины х2, и наоборот.
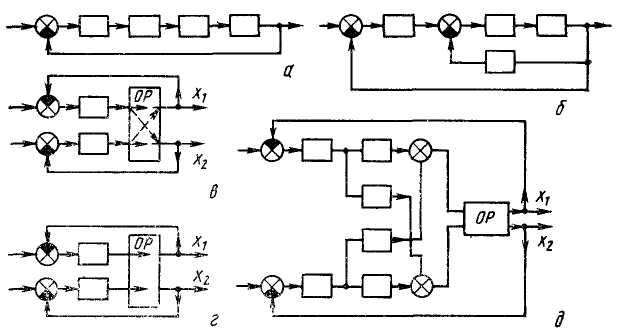
Рисунок 27 – Виды контуров регулирования:
а – одноконтурная АСР; б – двухконтурная АСР; в – зависимая многоконтурная система несвязанного регулирования; г – независимая многоконтурная система несвязанного регулирования; д – многоконтурная система связанного регулирования
Независимые системы несвязанного регулирования отличаются от зависимых тем, что в них изменение одной из регулируемых величин не приводит к изменению других регулируемых величин. Блок-схема такой АСР, где изменение одной регулируемой величины х1 не вызывает изменения другой величины х2, и наоборот, представлена на рис. 27, г.
В независимых многоконтурных АСР процессы регулирования различных регулируемых величин можно рассматривать независимо друг от друга.
Системами связанного регулирования называют многоконтурные АСР, в которых различные регулируемые величины одного и того же управляемого технологического процесса (или соответственно различные регуляторы) имеют связи между собой как через объект регулирования, так и вне объекта. Блок-схема такой АСР представлена на рис. 24, д.
Существует также классификация АСР по другим признакам, например по функциональному назначению (АСР температуры, давления, расхода, уровня, солесодержания и т.п.); по виду энергии, используемой для регулирования (электрические, гидравлические, пневматические, механические и другие АСР); по числу регулируемых величин (одномерные АСР – системы с одной регулируемой величиной, многомерные АСР – системы с несколькими регулируемыми величинами).