

Алгоритмы метода сопряженных градиентов
|
traincgf |
Алгоритм Флетчера – Ривса CGF |
Синтаксис:
[net,TR,Ac,El] = traincgf(NET,Pd,Tl,Ai,Q,TS,VV)
info = traincgf(code)
Описание:
Функция traincgf обучает нейронную сеть, используя метод сопряженного градиента с обратным распространением ошибки в модификации Флетчера – Ривса.
Функция при своей работе использует следующие параметры:
info = traincgf'pdefaults')'
info =
-
epochs:
100
scale_tol:
20
maxstep:
100
show:
25
alpha:
0.001
minstep:
1.0 e–006
goal:
0
beta:
0.1
bmax:
26
time:
Inf
delta:
0.01
min_grad:
1.0e–006
gama:
0.1
max_fail:
5
low_lim:
0.1
searchFcn:
'srchbac'
up_lim:
0.5
Применение функции:
Функция обучения traincgf используется при создании сетей с помощью методов newff, newcf,newelm, а также при формировании сетей с атрибутами, определяемыми пользователем.
Для того чтобы подготовить сеть к обучению, необходимо:
установить свойство сети net.trainFcnравным'traincgf'. Это автоматически установит значения параметров обучения, соответствующие значениям свойстваnet.trainParamпо умолчанию.
Для того чтобы фактически обучить сеть, необходимо:
инициализировать нейронную сеть;
присвоить, если это необходимо, требуемые значения параметрам обучения;
применить функцию train.
Алгоритм:
Функция traincgf выполняет процедуру обучения, если функции взвешивания, накопления и активации имеют производные. Для вычисления производных критерия качества обучения по переменным веса и смещения используется метод обратного распространения ошибки. В соответствии с алгоритмом метода сопряженных градиентов вектор настраиваемых переменных получает следующие приращения:
X = X + a*dX,
где dX– направление поиска. Параметрaвыбирается так, чтобы минимизировать критерий качества обучения в направлении поиска. Функция одномерного поискаsearchFcnиспользуется для вычисления минимума. Начальное направление поиска задается вектором, противоположным градиенту критерия качества. При успешных итерациях направление поиска определяется на основе нового значения градиента с учетом прежнего направления поиска согласно формуле
dX = –gX + dX_old*Z,
где gX– вектор градиента; параметрZможет быть вычислен отдельными различными способами. Для метода сопряженного градиента в модификации Флетчера – Ривса он рассчитывается согласно формуле [41]
Z = Normnew_sqr/norm_sqr,
где normnew_sqr– квадрат нормы текущего градиента;norm_sqr– квадрат нормы предыдущего градиента.
Обучение прекращается, когда выполнено одно из следующих условий:
значение функции качества стало меньше предельного;
градиент критерия качества стал меньше значения min_grad;
достигнуто предельное число циклов обучения;
превышено максимальное время, отпущенное на обучение;
ошибка контрольного подмножества превысила ошибку обучающего более чем в max_fail раз.
Пример:
Заданы следующие обучающие последовательности входов P и целей T:
P = [0 1 2 3 4 5];
T = [0 0 0 1 1 1];
Поскольку соответствие между входом и целью носит явно выраженный нелинейный характер, то будем использовать нейронную сеть с нелинейными сигмоидальными функциями активации. Выберем двухслойную нейронную сеть с прямой передачей сигнала; в первом слое используем 2 нейрона с функцией активации tansig, а во втором – 1 нейрон с функцией активацииlogsig. Для обучения сети применим функцию traincgf.
Формирование сети:
net = newff([0 5],[2 1],{'tansig','logsig'},'traincgf');
Обучение сети:
net.trainParam.epochs = 50;
net.trainParam.show = 10;
net.trainParam.goal = 0.001;
[net,TR] = train(net,P,T); % Рис.11.51
На рис. 11.51 показано, как изменяется точность в процессе обучения; требуемое значение обеспечивается на 6-м цикле обучения.
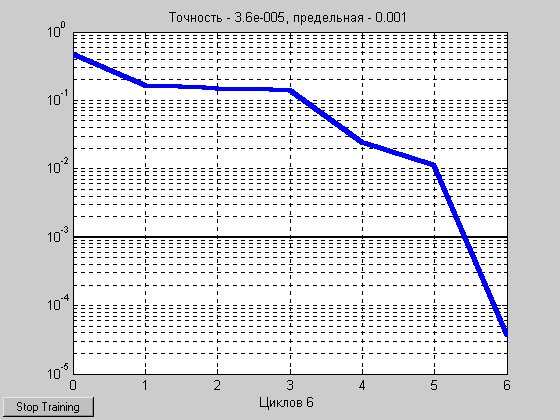 Рис. 11.51
Рис. 11.51
Выполним моделирование сети:
Y = sim(net,P)
Y = 0.0005 0.0005 0.0007 0.9862 0.9964 0.9964
Требуемое соответствие между входом и выходом нейронной сети обеспечивается с заданной среднеквадратичной погрешностью равной 0.001, т. е. с точностью на порядок большей, чем в предшествующих примерах.
Сопутствующие функции: NEWFF, NEWCF, TRAINGDM, TRAINGDA, TRAINGDX, TRAINLM, TRAINCGP, TRAINCGB, TRAINSCG, TRAINCGP, TRAINOSS, TRAINBFG.
|
traincgp |
Алгоритм Полака – Рибейры CGP |
Синтаксис:
[net,TR,Ac,El] = traincgp(NET,Pd,Tl,Ai,Q,TS,VV)
info = traincgp(code)
Описание:
Функция traincgpобучает нейронную сеть, используя метод сопряженного градиента с обратным распространением ошибки в модификации Полака – РибейрыCGP.
Функция при своей работе использует следующие параметры:
info = traincgp'pdefaults')'
info =
-
epochs:
100
scale_tol:
20
maxstep:
100
show:
25
alpha:
0.001
minstep:
1.0 e–006
goal:
0
beta:
0.1
bmax:
26
time:
Inf
delta:
0.01
min_grad:
1.0e–006
gama:
0.1
max_fail:
5
low_lim:
0.1
searchFcn:
'srchbac'
up_lim:
0.5
Применение функции:
Функция обучения traincgpиспользуется при создании сетей с помощью методовnewff, newcf,newelm, а также при формировании сетей с атрибутами, определяемыми пользователем.
Для того чтобы подготовить сеть к обучению, необходимо:
установить свойство сети net.trainFcnравным'traincgp'. Это автоматически установит значения параметров обучения, соответствующие значениям свойстваnet.trainParamпо умолчанию.
Для того чтобы фактически обучить сеть, необходимо:
инициализировать нейронную сеть;
присвоить, если это необходимо, требуемые значения параметрам обучения;
применить функцию train.
Алгоритм:
Функция traincgp выполняет процедуру обучения, если функции взвешивания, накопления и активации имеют производные. Для вычисления производных критерия качества обучения по переменным веса и смещения используется метод обратного распространения ошибки. В соответствии с алгоритмом метода сопряженных градиентов вектор настраиваемых переменных получает следующие приращения:
X = X + a*dX,
где dX– направление поиска. Параметрaвыбирается так, чтобы минимизировать критерий качества обучения в направлении поиска. Функция одномерного поискаsearchFcnиспользуется для вычисления минимума. Начальное направление поиска задается вектором, противоположным градиенту критерия качества. При успешных итерациях направление поиска определяется на основе нового значения градиента с учетом прежнего направления поиска согласно формуле
dX = –gX + dX_old*Z,
где gX– вектор градиента; параметрZможет быть вычислен отдельными различными способами. Для метода сопряженного градиента в модификации Полака – Рибейры он рассчитывается согласно формуле [41]
Z = ((gX – gX_old)’*gX)/norm_sqr,
где gX_old – вектор градиента на предыдущей итерации; norm_sqr – квадрат нормы вектора градиента.
Обучение прекращается, когда выполнено одно из следующих условий:
значение функции качества стало меньше предельного;
градиент критерия качества стал меньше значения min_grad;
достигнуто предельное число циклов обучения;
превышено максимальное время, отпущенное на обучение;
ошибка контрольного подмножества превысила ошибку обучающего более чем в max_fail раз.
Пример:
Заданы следующие обучающие последовательности входов P и целей T:
P = [0 1 2 3 4 5];
T = [0 0 0 1 1 1];
Поскольку соответствие между входом и целью носит явно выраженный нелинейный характер, то будем использовать нейронную сеть с нелинейными сигмоидальными функциями активации. Выберем двухслойную нейронную сеть с прямой передачей сигнала; в первом слое используем 2 нейрона с функцией активации tansig, а во втором – 1 нейрон с функцией активацииlogsig. Для обучения сети применим функциюtraincgp.
Формирование сети:
net = newff([0 5],[2 1],{'tansig','logsig'},'traincgp');
Обучение сети:
net.trainParam.epochs = 50;
net.trainParam.show = 10;
net.trainParam.goal = 0.001;
[net,TR] = train(net,P,T); % Рис.11.52
На рис. 11.52 показано, как изменяется точность в процессе обучения; требуемое значение обеспечивается на 13-м цикле обучения.
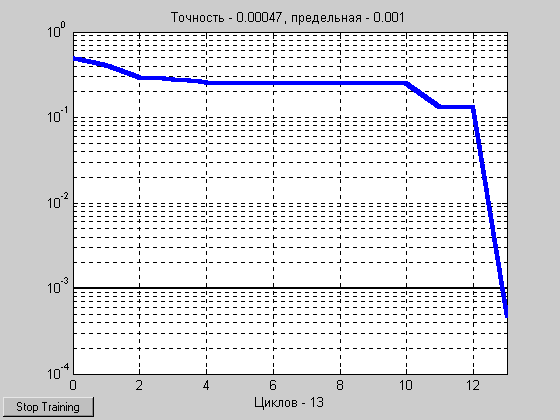 Рис. 11.52
Рис. 11.52
Выполним моделирование сети:
Y = sim(net,P)
Y = 0.0000 0.0000 0.0000 0.9491 0.9883 0.9891
Требуемое соответствие между входом и выходом нейронной сети обеспечивается с заданной среднеквадратичной погрешностью, равной 0.001.
Сопутствующие функции: NEWFF, NEWCF, TRAINGDM, TRAINGDA, TRAINGDX, TRAINLM, TRAINRP, TRAINCGF, TRAINCGB, TRAINSCG, TRAINOSS, TRAINBFG.
|
traincgb |
Алгоритм обучения CGB |
Синтаксис:
[net,TR,Ac,El] = traincgb(NET,Pd,Tl,Ai,Q,TS,VV)
info = traincgb(code)
Описание:
Функция traincgbобучает нейронную сеть, используя метод сопряженного градиентас обратным распространением ошибки и рестартами в модификации Пауэлла – Биеле CGB.
Функция при своей работе использует следующие параметры:
info = traincgb'pdefaults')'
info =
-
epochs:
100
scale_tol:
20
maxstep:
100
show:
25
alpha:
0.001
minstep:
1.0 e–006
goal:
0
beta:
0.1
bmax:
26
time:
Inf
delta:
0.01
min_grad:
1.0e–006
gama:
0.1
max_fail:
5
low_lim:
0.1
searchFcn:
'srchbac'
up_lim:
0.5
Применение функции:
Функция обучения traincgbиспользуется при создании сетей с помощью методовnewff, newcf,newelm, а также при формировании сетей с атрибутами, определяемыми пользователем.
Для того чтобы подготовить сеть к обучению, необходимо:
установить свойство сети net.trainFcnравным'traincgb'. Это автоматически установит значения параметров обучения, соответствующие значениям свойстваnet.trainParamпо умолчанию.
Для того чтобы фактически обучить сеть, необходимо:
инициализировать нейронную сеть;
присвоить, если это необходимо, требуемые значения параметрам обучения;
применить функцию train.
Алгоритм:
Функция traincgb выполняет процедуру обучения, если функции взвешивания, накопления и активации имеют производные. Для вычисления производных критерия качества обучения по переменным веса и смещения используется метод обратного распространения ошибки. В соответствии с алгоритмом метода сопряженных градиентов вектор настраиваемых переменных получает следующие приращения:
X = X + a*dX,
где dX– направление поиска; параметрaвыбирается так, чтобы минимизировать критерий качества обучения в направлении поиска. Функция одномерного поискаsearchFcnиспользуется для вычисления минимума. Начальное направление поиска задается вектором, противоположным градиенту критерия качества. При успешных итерациях направление поиска определяется на основе нового значения градиента с учетом прежнего направления поиска согласно формуле
dX = –gX + dX_old*Z,
где gX– вектор градиента; параметрZможет быть вычислен различными способами. Метод сопряженного градиента в модификации Пауэлла – Биеле реализует стратегию рестартов для выбора правильного направления движения к минимуму [34].
Обучение прекращается, когда выполнено одно из следующих условий:
значение функции качества стало меньше предельного;
градиент критерия качества стал меньше значения min_grad;
достигнуто предельное число циклов обучения;
превышено максимальное время, отпущенное на обучение;
ошибка контрольного подмножества превысила ошибку обучающего более чем в max_fail раз.
Пример:
Заданы следующие обучающие последовательности входов P и целей T:
P = [0 1 2 3 4 5];
T = [0 0 0 1 1 1];
Поскольку соответствие между входом и целью носит явно выраженный нелинейный характер, то будем использовать нейронную сеть с нелинейными сигмоидальными функциями активации. Выберем двухслойную нейронную сеть с прямой передачей сигнала; в первом слое используем 2 нейрона с функцией активации tansig, а во втором – 1 нейрон с функцией активацииlogsig. Для обучения сети применим функциюtraincgb.
Формирование сети:
net = newff([0 5],[2 1],{'tansig','logsig'},'traincgb');
Обучение сети:
net.trainParam.epochs = 50;
net.trainParam.show = 10;
net.trainParam.goal = 0.001;
[net,TR] = train(net,P,T); % Рис.11.53
На рис. 11.53 показано, как изменяется точность в процессе обучения; требуемое значение обеспечивается на 5-м цикле обучения.
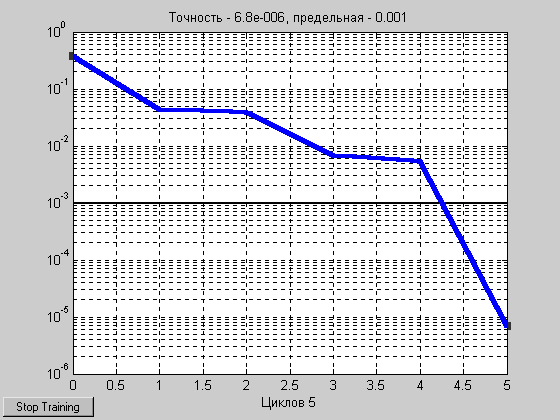 Рис. 11.53
Рис. 11.53
Выполним моделирование сети:
Y = sim(net,P)
Y = 0.0034 0.0034 0.0038 0.9983 0.9999 0.9999
Требуемое соответствие между входом и выходом нейронной сети обеспечивается с заданной среднеквадратичной погрешностью, равной 0.001.
Сопутствующие функции: NEWFF, NEWCF, TRAINGDM, TRAINGDA, TRAINGDX, TRAINLM, TRAINCGP, TRAINCGF, TRAINCGB, TRAINSCG, TRAINOSS, TRAINBFG.
|
trainscg |
Алгоритм обучения SCG |
Синтаксис:
[net,TR,Ac,El] = trainscg(net,Pd,Tl,Ai,Q,TS,VV)
info = trainscg(code)
Описание:
Функция trainscgобучает нейронную сеть, используя комбинацию метода сопряженного градиента с квазиньютоновым подходом в модификации МоллераSCG.
Функция при своей работе использует следующие параметры:
info = trainscg'pdefaults')'
info =
-
epochs:
100
sigma:
5.0e–5
show:
25
lambda:
5.0e–7
goal:
0
time:
Inf
min_grad:
1.0e–006
max_fail:
5
Применение функции:
Функция обучения trainscgиспользуется при создании сетей с помощью методовnewff,newcf,newelm, а также при формировании сетей с атрибутами, определяемыми пользователем.
Для того чтобы подготовить сеть к обучению, необходимо:
установить свойство сети net.trainFcnравным'trainscg'. Это автоматически установит значения параметров обучения, соответствующие значениям свойстваnet.trainParam по умолчанию.
Для того чтобы фактически обучить сеть, необходимо:
инициализировать нейронную сеть;
присвоить, если это необходимо, требуемые значения параметрам обучения;
применить функцию train.
Алгоритм:
Функция trainscgвыполняет процедуру обучения, если функции взвешивания, накопления и активации имеют производные. Для вычисления производных критерия качества обучения по переменным веса и смещения используется метод обратного распространения ошибки.
Этот алгоритм реализует упрощенную по сравнению с функциями traincgp, traincgf,traincgbстратегию метода сопряженных градиентов, предложенную Моллером [29].
Обучение прекращается, когда выполнено одно из следующих условий:
значение функции качества стало меньше предельного;
градиент критерия качества стал меньше значения min_grad;
достигнуто предельное число циклов обучения;
превышено максимальное время, отпущенное на обучение;
ошибка контрольного подмножества превысила ошибку обучающего более чем в max_fail раз.
Пример:
Заданы следующие обучающие последовательности входов P и целей T:
P = [0 1 2 3 4 5];
T = [0 0 0 1 1 1];
Поскольку соответствие между входом и целью носит явно выраженный нелинейный характер, то будем использовать нейронную сеть с нелинейными сигмоидальными функциями активации. Выберем двухслойную нейронную сеть с прямой передачей сигнала; в первом слое используем 2 нейрона с функцией активации tansig, а во втором – 1 нейрон с функцией активацииlogsig. Для обучения сети применим функциюtrainscg.
Формирование сети:
net = newff([0 5],[2 1],{'tansig','logsig'},'trainscg');
Обучение сети:
net.trainParam.epochs = 50;
net.trainParam.show = 10;
net.trainParam.goal = 0.001;
[net,TR] = train(net,P,T); % Рис.11.54
На рис. 11.54 показано, как изменяется точность в процессе обучения; требуемое значение обеспечивается на 14-м цикле обучения.
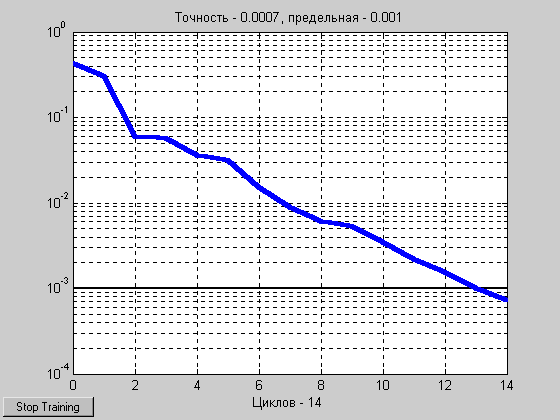 Рис. 11.54
Рис. 11.54
Выполним моделирование сети:
Y = sim(net,P)
Y = 0.0053 0.0061 0.0522 0.9629 0.9899 0.9906
Требуемое соответствие между входом и выходом нейронной сети обеспечивается с заданной среднеквадратичной погрешностью, равной 0.001.
Сопутствующие функции: NEWFF, NEWCF, TRAINGDM, TRAINGDA, TRAINGDX, TRAINLM, TRAINRP, TRAINCGF, TRAINCGB, TRAINBFG, TRAINCGP, TRAINOSS.