

Постановка задачи
Допустим, что на вход фильтра подается входной сигнал вида r(t) = sin(10*sin(t)*t), заданный массивом значений R с тактом квантования 0.025 с на интервале 5 с:
time = 0:0.025:5;
R = sin(sin(time).*time*10);
plot(time,R)
axis([0 5 –1 1]);
График этого сигнала показан на рис. 9.12.
 Рис. 9.12
Рис. 9.12
Рассматривается линейный стационарный фильтр, описываемый следующим рекуррентным соотношением:
![]() (9.2)
(9.2)
Это фильтр второго порядка, функционирование которого в системе MATLAB описывается следующей М-функцией:
Y = filter([1 0.5 –1.5],1,R);
plot(time,T)
axis([0 5 –2 2]);
График сигнала выхода этого фильтра показан на рис. 9.13.
 Рис. 9.13
Рис. 9.13
Задача нейронной сети – сформировать такую линейную модель, которая в процессе обучения определяет параметры фильтра, а затем использует их для моделирования при произвольных значениях входа.
Определим следующую обучающую последовательность: в качестве целевого выхода T примем массив Y, а входную последовательность P зададим на основе текущего и двух предшествующих значений входа R:
T = Y;
Q = size(R,2);
P = zeros(3,Q);
P(1,1:Q) = R(1,1:Q);
P(2,2:Q) = R(1,1:(Q–1));
P(3,3:Q) = R(1,1:(Q–2));
Синтез сети
Нейронная сеть должна иметь только 1 нейрон, потому что динамическая система имеет только 1 выход. Нейрон должен иметь 3 входа, чтобы получить текущий и 2 запаздывающих значения входного сигнала. М-функция newlind позволяет выполнить синтез такой нейронной сети:
net = newlind(P,T);
net.IW{1}, net.b
ans = 1.0000 0.5000 –1.5000
ans = –7.4394e–017
Нетрудно убедиться, что сеть точно определяет параметры фильтра.
Проверка сети
Для проверки функционирования сети подадим входную последовательность Р и сравним с целевой последовательностью T(рис. 9.14):
a = sim(net,P);
plot(time,T, 'Color', [0 0.8 0.8], 'LineWidth',3),hold on
plot(time,a, 'k'), grid on
axis([0 5 –2 2]); % Рис.9.14
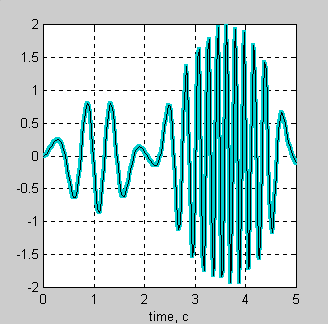 Рис. 9.14
Рис. 9.14
Сеть выполняет поставленную задачу. Погрешность моделирования показана на рис. 9.15 и находится в пределах точности компьютера при вычислениях с плавающей точкой:
e = T–a; plot(time, e)
 Рис. 9.15
Рис. 9.15
Построенная линейная нейронная сеть может быть использована для идентификации и моделирования динамических систем, причем для линейных систем погрешности близки к 0.
Для нелинейных систем такой подход при достаточно малых амплитудах входного сигнала обеспечивает линеаризацию с минимальной среднеквадратичной ошибкой. Если нелинейная система переместится в другую рабочую точку, то изменятся и параметры нейронной сети. Для того чтобы получить линеаризованную модель за короткое время, частота замеров должна быть достаточно высокой, а на вход нелинейной системы необходимо подать пробный сигнал в виде случайного процесса небольшой амплитуды. Это ускорит адаптацию сети, поскольку большее количество измерений, характеризующих динамику системы, будет представлено на коротком интервале времени. Учет в случае нелинейных систем большего числа запаздывающих входов позволяет минимизировать ошибку при моделировании нелинейной системы. Если система характеризуется существенной нелинейностью, то более подходящими будут сети с обучением методом обратного распространения ошибки или радиальные базисные сети.
Читатель может обратиться к демонстрационному примеру applin3, где рассмотрена подобная задача.