

Информация о сети и ее топологии
|
DISP, DISPLAY |
Вывод на экран свойств нейронной сети |
Синтаксис:
disp(net)
display(net)
Описание:
Команда disp(net) выводит на экран свойства нейронной сети с именем net.
Команда display(net) выводит на экран не только свойства нейронной сети, но и ее имя.
Пример:
Создадим персептрон и выведем на экран его свойства:
net = newp([–1 1; 0 2],3); display(net)
net =
Neural Network object:
architecture:
numInputs: 1
numLayers: 1
biasConnect: [1]
inputConnect: [1]
layerConnect: [0]
outputConnect: [1]
targetConnect: [1]
numOutputs: 1 (read–only)
numTargets: 1 (read–only)
numInputDelays: 0 (read–only)
numLayerDelays: 0 (read–only)
subobject structures:
inputs: {11 cell} of inputs
layers: {11 cell} of layers
outputs: {11 cell} containing 1 output
targets: {11 cell} containing 1 target
biases: {11 cell} containing 1 bias
inputWeights: {11 cell} containing 1 input weight
layerWeights: {11 cell} containing no layer weights
functions:
adaptFcn: ‘adaptwb’
initFcn: ‘initlay’
performFcn: ‘mae’
trainFcn: ‘trainwb’
parameters:
adaptParam: .passes
initParam: (none)
performParam: (none)
trainParam: .epochs, .goal, .max_fail, .show,
.time
weight and bias values:
IW: {11 cell} containing 1 input weight matrix
LW: {11 cell} containing no layer weight matrices
b: {11 cell} containing 1 bias vector
other:
userdata: (user stuff)
Справка:
help network/disp
help network/display
Сопутствующие функции: DISP, SIM, INIT, TRAIN, ADAPT.
|
PLOTSOM |
Отображение топологии карты Кохонена |
Синтаксис:
plotsom(pos)
plotsom(W,D,nd)
Описание:
Функция plotsom(pos) отображает топологию карты Кохонена в виде узлов N-мерной сетки, используя массив координат узлов размераNS, помечает узлы красным цветом и соединяет их линиями. Координаты узлов сетки рассчитываются с помощью М-функций gridtop,hextop,randtop. Размерность сетки при использовании функции plotsom не должнапревышать значения 3; если размерность сетки больше, то выводятся только 3 координаты.
Функция plotsom(W, D, nd) строит сетку в пространстве весов, задаваемых матрицейWразмера SN, если заданы матрица расстоянийDразмера SS и евклидово расстояниеndмежду соседними нейронами, по умолчанию равное 1.
Пример:
Рассмотрим способы отображения двумерных и трехмерных карт Кохонена; для этого с помощью М-функции gridtop рассчитаем сетку с прямоугольной топологией:
pos = gridtop(4,3);
plotsom(pos) % Рис.11.74,а
Для отображения двумерной карты Кохонена в пространстве весов зададим случайную матрицу весов W размера 122 и вычислим матрицу расстояний D на выбранной сетке:
W = rand(12,2);
D = dist(pos);
plotsom(W,D) % Рис.11.74,б
|
а |
б |


Рис. 11.74
Выполним аналогичные построения для трехмерной карты Кохонена:
pos = gridtop(4,3,3);
plotsom(pos) % Рис.11.75,а
D = dist(pos);
W = rand(36,3);
plotsom(W, D) % Рис.11.75,б
|
а |
б |

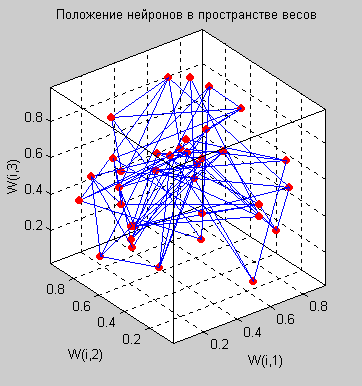
Рис. 11.75
Сопутствующие функции: NEWSOM, LEARNSOM, INITSOM.
|
GRIDTOP |
Расчет сетки с прямоугольной топологией |
Синтаксис:
gridtop(dim1,dim2,...,dimN)
Описание:
Функция pos = gridtop(dim1, dim2, ..., dimN) рассчитывает
положения нейронов
на N-мерной сетке
с прямоугольной топологией, если задано
число нейронов dimI по размерности i,
и возвращает массив координат узлов
pos размера NS, где S
=![]() .
.
Пример:
Рассчитать положения нейронов на четырехмерной сетке с прямоугольной топологией размера 5432 и выполнить попытку построить график.
pos = gridtop(5,4,3,2);
plotsom(pos) % Рис.11.76
Warning – PLOTSOM only shows first three dimensions.
Предупреждение – PLOTSOM выводит только 3 размерности.
 Рис. 11.76
Рис. 11.76
В результате будет построен график только по трем последним размерностям (рис. 11.76).
Сопутствующие функции: HEXTOP, RANDTOP.
|
HEXTOP |
Расчет сетки с гексагональной топологией |
Синтаксис:
pos = hextop(dim1,dim2,...,dimN)
Описание:
Функция pos = hextop(dim1, dim2, ..., dimN) рассчитывает
положения нейронов
на N-мерной сетке
с гексагональной топологией, если задано
число нейронов dimI по размерности i,
и возвращает массив координат узлов
pos размера NS, где S
=![]()
Пример:
Рассчитать положения нейронов на трехмерной сетке с гексагональной топологией размера 543 с 60 нейронами и построить график их расположения
pos = hextop(5,4,3); plotsom(pos) % Рис.11.77
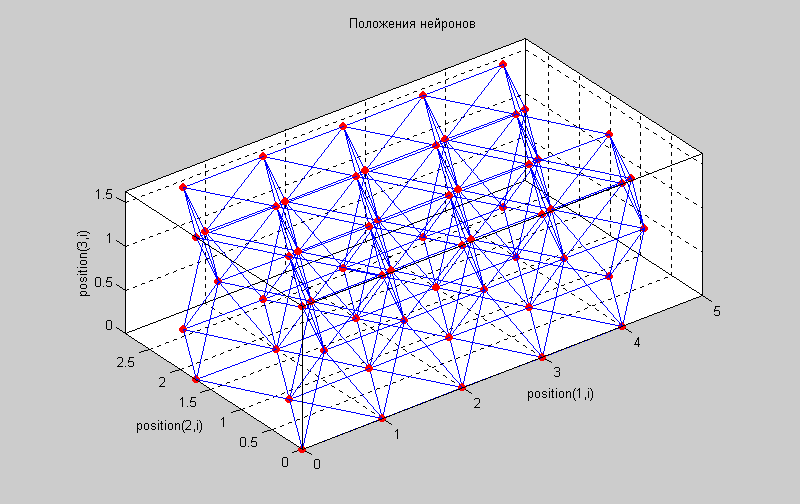 Рис. 11.77
Рис. 11.77
Сопутствующие функции: GRIDTOP, RANDTOP.
|
RANDTOP |
Расчет сетки со случайной топологией |
Синтаксис:
pos = randtop(dim1,dim2,...,dimN)
Описание:
Функция pos = hextop(dim1, dim2, ..., dimN) рассчитывает
положения нейронов
на N-мерной сетке
с гексагональной топологией, если задано
число нейронов dimI по размерности i,
и возвращает массив координат узлов
pos размера NS, где S
=![]()
Пример:
Рассчитать положения нейронов на трехмерной сетке со случайной топологией размера 543 с 60 нейронами и построить график их расположения.
pos = randtop(5,4,3); plotsom(pos) % Рис.11.78
 Рис. 11.78
Рис. 11.78
Сопутствующие функции: GRIDTOP, HEXTOP.
|
NNTOOL |
Вызов графического интерфейса пользователя |
Синтаксис:
nntool
Описание:
Команда nntool открывает окно Network/Data Manager(Управление сетью/данными), которое позволяет управлять вводом и выводом данных, создавать, обучать и моделировать нейронные сети.
Подробно работа с графическим интерфейсом пользователя ППП NeuralNetworkToolboxописана в разд. 1.2.