

3.3.3. Квазиньютоновы алгоритмы Алгоритм bfgs
Альтернативой методу сопряженных градиентов для ускоренного обучения нейронных сетей служит метод Ньютона. Основной шаг этого метода определяется соотношением
![]() (3.28)
(3.28)
где![]() –
вектор настраиваемых параметров;
–
вектор настраиваемых параметров;
![]() –
матрица Гессе вторых частных производных
функционала ошибки по настраиваемым
параметрам;
–
матрица Гессе вторых частных производных
функционала ошибки по настраиваемым
параметрам;![]() –
вектор градиента функционала ошибки.
Процедуры минимизации на основе метода
Ньютона, как правило, сходятся быстрее,
чем те же процедуры на основе метода
сопряженных градиентов.
Однако
вычисление матрицы Гессе – это весьма
сложная и дорогостоящая в вычислительном
отношении процедура. Поэтому разработан
класс алгоритмов, которые основаны на
методе Ньютона, но не требуют вычисления
вторых производных. Это классквазиньютоновых алгоритмов, которые
используют на каждой итерации некоторую
приближенную оценку матрицы Гессе.
–
вектор градиента функционала ошибки.
Процедуры минимизации на основе метода
Ньютона, как правило, сходятся быстрее,
чем те же процедуры на основе метода
сопряженных градиентов.
Однако
вычисление матрицы Гессе – это весьма
сложная и дорогостоящая в вычислительном
отношении процедура. Поэтому разработан
класс алгоритмов, которые основаны на
методе Ньютона, но не требуют вычисления
вторых производных. Это классквазиньютоновых алгоритмов, которые
используют на каждой итерации некоторую
приближенную оценку матрицы Гессе.
Одним из наиболее эффективных алгоритмов такого типа является алгоритм BFGS, предложенный Бройденом, Флетчером, Гольдфарбом и Шанно (Broyden, Fletcher, Goldfarb and Shanno) [9]. Этот алгоритм реализован в виде М-функцииtrainbfg.
Вновь обратимся к сети, показанной на рис.3.7, но будем использовать функцию обучения trainbfg:
net = newff([–1 2; 0 5],[3,1],{'tansig','purelin'},'trainbfg');
Параметры функции trainbfg практически совпадают с параметрами функцииtraincgf, за исключением используемой программы одномерного поиска, которая в данном случае заменена М-функциейsrchbac.
Установим параметры обучающей процедуры по аналогии с предшествующими примерами:
net.trainParam.epochs = 300;
net.trainParam.show = 5;
net.trainParam.goal = 1e–5;
p = [–1 –1 2 2;0 5 0 5];
t = [–1 –1 1 1];
net = train(net,p,t); % Рис.3.16
На рис. 3.16 приведен график изменения ошибки в зависимости от числа выполненныхциклов обучения.
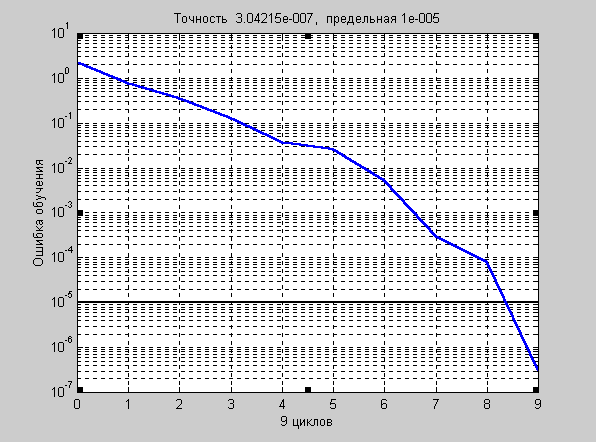 Рис. 3.16
Рис. 3.16
a = sim(net,p)
a = –1.0011 –1.0001 0.9999 1.0003
Алгоритм BFGSтребует большего количества вычислений на каждой итерации и большего объема памяти, чем алгоритмы метода сопряженных градиентов, хотя, как правило, он сходится на меньшем числе итераций. Требуется на каждой итерации хранить оценку матрицы Гессе, размер которой определяется числом настраиваемых параметров сети. Поэтому для обучения нейронных сетей больших размеров лучше использовать алгоритмRpropили какой-либо другой алгоритм метода сопряженных градиентов. Однако для нейронных сетей небольших размеров алгоритм BFGSможет оказаться эффективным.
Алгоритм oss
Алгоритм OSS(OneStepSecant), или одношаговый алгоритм метода секущих плоскостей, описан в работе Баттити (Battiti) [1]. В нем сделана попытка объединить идеи метода сопряженных градиентов и схемы Ньютона. Алгоритм не запоминает матрицу Гессе, полагая ее на каждой итерации равной единичной. Это позволяет определять новое направление поиска не вычисляя обратную матрицу.
Вновь обратимся к сети, показанной на рис.3.7, но будем использовать функцию обучения trainoss:
net = newff([–1 2; 0 5],[3,1],{'tansig','purelin'},'trainoss');
Функция trainoss характеризуется теми же параметрами, заданными по умолчанию, что и функцияtrainbfg.
Установим параметры обучающей процедуры по аналогии с предшествующими примерами:
net.trainParam.epochs = 300;
net.trainParam.show = 5;
net.trainParam.goal = 1e–5;
p = [–1 –1 2 2;0 5 0 5];
t = [–1 –1 1 1];
net=train(net,p,t); % Рис.3.17
На рис. 3.17 приведен график изменения ошибки обучения в зависимости от числа выполненных циклов обучения.
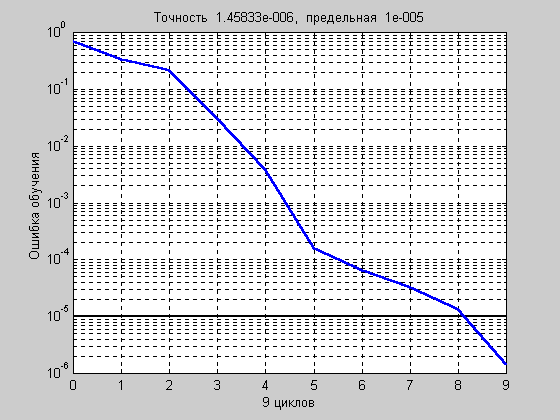 Рис. 3.17
Рис. 3.17
a = sim(net,p)
a = –1.0020 –0.9988 0.9994 1.0002
Этот алгоритм требует меньших объемов памяти и вычислительных ресурсов на цикл по сравнению с алгоритмом BFGS, но больше, чем алгоритмCGF. Таким образом, алгоритмOSSможет рассматриваться как некий компромисс между алгоритмами методов сопряженных градиентов и Ньютона.