

Контрольная работа д5 Применение общего уравнения динамики к изучению движения механической системы с одной степенью свободы
Механическая система, изображенная на рис.1, приводится в движение из состояния покоя. При этом колесо В катится без скольжения по плоскости.
Массы
тел:
 =300
кг,
=300
кг,
 =100
кг,
=100
кг, =10
кг
=10
кг
Заданная нагрузка: М=20 Н∙м и F=500 Н
Радиусы колеса В и шкива D соответственно равны RВ=0,8 м, rВ=0,5 м, RD=0,2м, радиус инерции колеса В ρВ=0,3 м
Углы имеют следующие значения: α=300, β=600
Коэффициент трения качения равен k = 0,05∙RВ; коэффициент трения скольжения тела А равен f = 0,1.
Используя общее уравнение динамики и принцип Даламбера для механической системы, определить ускорение тела А и натяжения в ветвях троса. Шкив D считать однородным сплошным диском; силами сопротивления в подшипниках, массой троса, его растяжением и проскальзыванием по ободу шкива пренебречь.
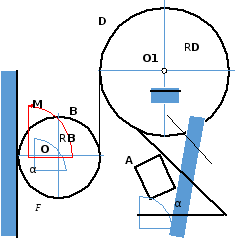
Рис.1
РЕШЕНИЕ:
Для определения ускорения груза А воспользуемся общим уравнением динамики:
 . (1)
. (1)
Где
 - суммарная работа активных сил,
действующих на систему, на любом возможном
перемещении механической системы.
- суммарная работа активных сил,
действующих на систему, на любом возможном
перемещении механической системы.
 -
суммарная работа сил инерции, действующих
на систему, на любом возможном перемещении
механической системы.
-
суммарная работа сил инерции, действующих
на систему, на любом возможном перемещении
механической системы.
Связи, наложенные на рассматриваемую механическую систему, можно считать идеальными, если силы трения скольжения и момент трения качения отнести к активным силам.
Тогда активными силами, действующими на систему, будут (рис.2):
силы
тяжести
 ,
, ,
, ,
реакции
,
реакции ,
, ,
, ,
сила трения скольжения
,
сила трения скольжения ,
действующая на груз А, сила трения
,
действующая на груз А, сила трения ,
действующая на колесо В и момент
,
действующая на колесо В и момент сил сопротивления качению блока В, а
так же приложенные к колесу В сила
сил сопротивления качению блока В, а
так же приложенные к колесу В сила и момент пары сил М.
и момент пары сил М.
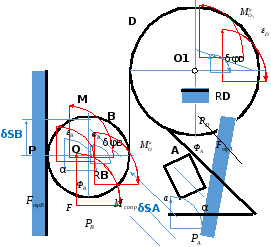
Рис. 2
Применим
к рассматриваемой системе принцип
Даламбера. Определим главные векторы
и главные моменты сил инерции тел
системы, которые затем условно присоединим
к этим телам противоположно их ускорениям.
Модуль
главного вектора
 поступательно движущегося тела А:
поступательно движущегося тела А:
 (2)
(2)
Модуль
главного момента сил инерции
 шкива D, вращающегося с угловым ускорением
шкива D, вращающегося с угловым ускорением :
:

Так
как шкив D считаем однородным цилиндром,
то его момент инерции относительно оси,
проходящей через точку О1:
 ,
то есть
,
то есть
 (3)
(3)
Модуль
главного вектора
 и модуль главного момента сил инерции
и модуль главного момента сил инерции колеса В вычисляем по формулам:
колеса В вычисляем по формулам:
 (4)
(4)

Момент
инерции колеса В относительно оси,
проходящей через точку О:
 .
Тогда
.
Тогда
 (5)
(5)
При
решении предыдущей задачи были получены
следующие кинематические соотношения
( - скорость центра масс колеса В):
- скорость центра масс колеса В):


 (6)
(6)
Дифференцируя обе части соотношений (6) по времени, получаем:


 (7)
(7)
Тогда формулы (3) – (5) с учетом соотношений (7) можно записать:
 (8)
(8)
 (9)
(9)
 (10)
(10)
Данная
механическая система имеет одну степень
свободы и ее положение в любой момент
времени однозначно определяется одной
обобщенной координатой. Выберем в
качестве обобщенной координаты
перемещение груза А. Сообщим системе
возможное перемещение
 .
.
Запишем
общее уравнение динамики для этой
системы:

 (11)
(11)
Учитываем,
что сила трения скольжения определяется
выражением:
 (12)
(12)
и момент сопротивления качению:
 (13)
(13)
Силы тяжести тел системы:
 (14)
(14)
Соотношения (6) можно записать в виде:



Или


 (15)
(15)
Заменяя в соотношениях (15) знак дифференциала d на знак вариации δ, получаем:


 (16)
(16)
Подставим в уравнение (11) соотношения (2), (8)-(10), (12)-(14), (16):

Или

Так
как
 ,
то
,
то


Откуда получаем:
Подставляя исходные данные, получим:
Рассмотрим
отдельно груз А. Действие троса заменим
его реакцией
 (рис.3)
(рис.3)
Направим ось х вдоль поверхности, по которой движется груз А.
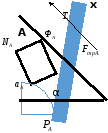
Рис.3
Так как согласно принципу Даламбера все действующие на систему внешние силы вместе с силами инерции образуют уравновешенную плоскую систему сил, то


Откуда

Подставляя числовые данные, найдем силу натяжения троса:

Аналогичным
образом рассмотрим равновесие шкива D
(рис.4).
Действие тросов заменим их реакциями
 и
и .
.
Тогда уравнение моментов сил относительно точки О1 можно записать в виде:


Откуда

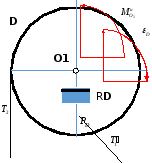
Рис.4
По
закону равенству действия и противодействия
 и учитывая соотношение (9), получим:
и учитывая соотношение (9), получим:
Подставляя числовые данные, найдем силу натяжения левой ветви троса:
Ответ:
 ;
; ;
;