

Пример 2
Рассчитать
электропривод механизма штабелирующего
стола слябинга 1150. Кинематическая схема
стола приведена на рис. 5.5. Стол массой
![]() т
уравновешен контргрузами массой
т
уравновешен контргрузами массой![]() 2x30
т, приводится от электродвигателя через
цилиндрическо-червячный редуктор и
реечную передачу.
2x30
т, приводится от электродвигателя через
цилиндрическо-червячный редуктор и
реечную передачу.
По технологическим требованиям цикл работы стола включает следующие операции. В исходном положении (стол занимает крайнее верхнее положение на уровне рольганга) первый сляб сталкивается с рольганга сталкивателем на стол, после чего стол опускается на толщину сляба плюс 10 мм и принимает следующий сляб. После набора стопы из 4-х слябов стол поднимается в исходное положение, тележка заезжает своими рогами в пазы стола, стол опускается, и слябы остаются на тележке. После перемещения тележки стол поднимается в исходное положение.
Расчет ведем для случая приема слябов массой 10 т, толщиной 200 мм.
Таким
образом, во время цикла работы (![]() и определяется временем прокатки 4-х
слябов) стол занимает следующие положения,
и определяется временем прокатки 4-х
слябов) стол занимает следующие положения,![]() м:
м:
0 -0,21 -0,41 -0,61 0 -0,4 0
Здесь принята традиционная система координат для вращающихся элементов (реечной шестерни). При расположении рейки "справа" от реечной шестерни для поступательно движущихся элементов стола положительным будет направление вверх.
Нагрузка
(масса слябов на столе,
![]() кг) при перемещении стола в операциях
цикла соответственно равна:
кг) при перемещении стола в операциях
цикла соответственно равна:
10000 20000 30000 40000 0 0
Скорость
установившегося движения стола при
подъеме и опускании постоянна во всех
операциях (![]() ).
).
Предварительно принимаем коэффициент полезного действия привода
![]()
С
учетом принятой системы координат
статическая нагрузка (усилие) на рейке
![]() ,
,
где
![]() - ускорение свободного падения.
- ускорение свободного падения.
Полное перемещение стола за цикл работы составляет 2.02м.
При скорости перемещения 0.06м/с время работы привода за цикл работы (без учета разгона-торможения)
2.02/0.06=33.67 с.
Приближенное значение относительной продолжительности включения
33.67/115 × 100%=29.3%
Принимаем повторно-кратковременный режим работы привода.
mст
М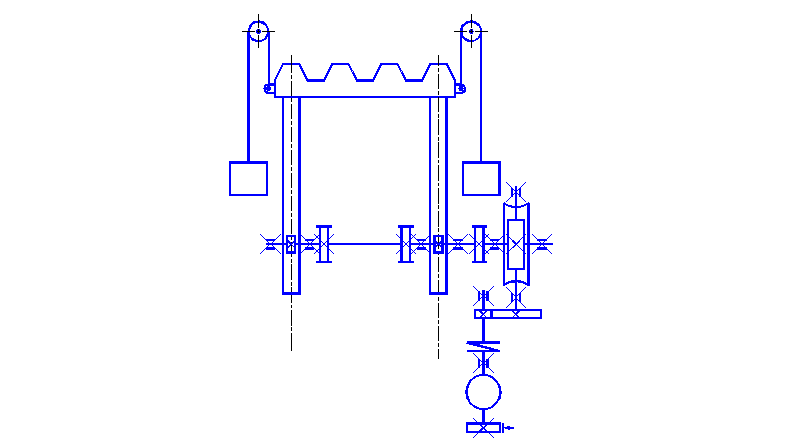
Рисунок 5.5 — Кинематическая схема штабелирующего стола
Ниже приведен исходный текст Pascal-программы PFU_P.pas и результаты предварительного расчета привода штабелирующего стола.
Program PFU_P;
{ МОЗЧМ, Фищенко, 11-07-2003 г
Программа "PFU"
Предварительный расчет привода металлургических машин
Штабелирующий стол }
Uses PRIVOD;
Procedure LOAD;{Определение нагрузок на столе }
{ Привод штабелирующего стола}
Const Ms=64200; Mk=60000;
Begin
For j:=1 To n Do If k2=1 Then Y[i,j]:=Y[1,j];
Mb:=-9.81*(Ms+Y[i,j]-Mk)*w0[i]; {Статическая мощность}
{ Мощность с учетом КПД }
If fi*Mb<0 Then Mc:=Mb/kpd1 Else Mc:=Mb*kpd1;
End;
BEGIN
{InpPrivod;
SubInpPrivod; }
k:=6; k1:=1; k2:=6; n:=1; S:=3;
f[0]:=0; f[1]:=-0.21; f[2]:=-0.41; f[3]:=-0.61;
f[4]:=0; f[5]:=-0.4; f[6]:=0;
w0[1]:=0.06; dt:=0.1;
Y[1,1]:=10000; Y[2,1]:=20000; Y[3,1]:=30000;
Y[4,1]:=40000; Y[5,1]:=0; Y[6,1]:=0;
kpd1:=0.6; tz:=115;
Assign(ff,'con'); { 'con' - консоль, вывод результата на экран;
для вывода результатов в файл вместо 'con' необходимо
ввести полное имя файла вывода (например 'A:\Iv.dat')}
Rewrite(ff);
Assign(fdat,'Ivanov.dat'); { 'Ivanov.dat'-полное имя файла вывода
результатов расчета в каждой операции (для построения графика) }
Rewrite(fdat);
OutPrivod;
For i:=1 To k Do
Begin
fi:=f[i]-f[i-1]; fm:=f[i]-f[i-1];
If k1=1 Then w0[i]:=w0[1];
ty:=Abs(fi/w0[i]); tp:=0; tt:=0;{Cycle}
WriteLn(fdat);
WriteLn(fdat,' Операция ',i);
WriteLn(fdat,' t(c) fi w e Mс');
WriteLn(ff,'║',i:6, ' │',fm:8:3,' │',' ',
' │',ty:8:3,' │',' ',' ║');
t:=dt/2;
While t<=tp+ty+tt Do
Begin
OPERATION;
LOAD;
WriteLn(fdat,t:5:2,f1:8:3,w1:9:3,e1:10:3,Mc:10:1);
It:=Mc;
If Abs(It)>Abs(Imax) Then Imax:=Abs(It);
z:=z+Sqr(It)*dt;
t:=t+dt;
End;
tsr:=tsr+t;
tsa:=tsa+a*(tp+tt)+ty;
End;
WriteLn(ff,fs);
Close(fdat);
If tz=0 Then tz:=tpa+tsr Else tpa:=tz-tsr;
MODE;
pv:=100*tsr/tz;
zz:=3600*k/tz;
WriteLn(ff);
WriteLn(ff,'Эквивалентная мощность -',Ie/1000:7:1,' кВт');
WriteLn(ff,'Максимальная мощность -',Imax/1000:7:1,' кВт');
WriteLn(ff,'Относительная продолжи-');
WriteLn(ff,'тельность включения -',pv:8:2,' %');
WriteLn(ff,'Число включений в час -',zz:6:0);
Close(ff);
END.
РЕЗУЛЬТАТЫ РАСЧЕТА
-
Операция
Перемещ.
(м)
Время (с)
разгона
установ
тормож
- 0.210
3.500
-0.200
3.333
-0.200
3.333
0.610
10.167
-0.400
6.667
0.400
6.667
Эквивалентная мощность - 24.4 кВт
Максимальная мощность - 43.4 кВт
Относительная продолжи-
тельность включения - 29.57 %
Число включений в час - 188
Принимаем предварительно электродвигатель МТ-52-8 мощностью 30 кВт при ПВ=40%, с частотой вращения 725мин-1(75.9рад/с), моментом инерции якоря 1.42 кгм2, кратностью максимального пускового момента – 3.
Выполним расчет на изгиб зубьев реечной передачи (расчет не приводится), в результате которого получим параметры реечной шестерни передачи
![]() .
.
Требуемая (для обеспечения заданной скорости стола) частота вращения реечной шестерни:
![]()
Общее передаточное число цилиндрическо-червячного редуктора
![]()
Принимаем передаточное число цилиндрической передачи редуктора (расчеты на прочность не приводятся)
![]()
Червячная передача
![]()
Действительное передаточное число редуктора
![]()
Действительная скорость перемещения стола
![]()
Процент отклонения действительной скорости от заданной
![]() ,
,
что вполне допустимо.
Определим данные для окончательного расчета электропривода.
Среднепусковой момент электродвигателя
|
|
|
где
![]() - кратность максимального пускового
момента двигателя;
- кратность максимального пускового
момента двигателя;
![]() -
кратность пускового момента при
переключении аппаратуры;
-
кратность пускового момента при
переключении аппаратуры;
|
|
|
Принимаем тормозной момент равным среднепусковому:
|
|
|
Приведенный к валу электродвигателя момент инерции движущихся частей:
|
|
|
где
![]()
![]()
![]() соответственно
момент инерции якоря двигателя, муфты
и тормозного шкива;
соответственно
момент инерции якоря двигателя, муфты
и тормозного шкива;
![]() -
коэффициент, учитывающий вращающиеся
массы редуктора.
-
коэффициент, учитывающий вращающиеся
массы редуктора.
|
|
|
То есть
|
|
![]() -
масса стола;
-
масса стола;
![]() -
масса 2-х контргрузов;
-
масса 2-х контргрузов;
![]() -
масса слябов на столе (см. нагрузку на
столе).
-
масса слябов на столе (см. нагрузку на
столе).
Второе слагаемое формулы – приведенный к валу двигателя момент инерции поступательно движущихся элементов стола – вычисляется в программе расчета.
![]() -
радиус делительной окружности реечной
шестерни;
-
радиус делительной окружности реечной
шестерни;
Коэффициент полезного действия привода.
Цилиндрическая
передача
![]() .
.
В червячной передаче КПД зависит от направления силового потока. При приводном червяке
|
|
|
где
![]() - угол подъема винтовой линии червяка.
- угол подъема винтовой линии червяка.
|
|
|
![]() -
приведенный угол трения. Зависит от
скорости скольжения червяка.
-
приведенный угол трения. Зависит от
скорости скольжения червяка.
|
|
|
При
такой скорости
![]() [10] (с учетом потерь в опорах и на
перемешивание смазки). Тогда
[10] (с учетом потерь в опорах и на
перемешивание смазки). Тогда
![]()
При генераторном режиме работы
|
|
|
Общий КПД привода
![]() (двигательный
режим);
(двигательный
режим);
![]() (генераторный
режим).
(генераторный
режим).
С учетом принятой системы координат статический момент на реечной шестерни
|
|
|
Приведенный
к валу двигателя статический вращающий
момент для двигательного режима работы
(при
![]() )
)
|
|
|
При генераторном режиме работы
|
|
|
Суммарный момент на валу электродвигателя
|
|
|
Примечание: Следует обратить внимание на то, что приведенная выше формула определения суммарного момента имеет (с точки зрения учебной литературы по расчету металлургических машин) необычный вид. На самом деле данная формула абсолютно верна по знакам и представляет собой уравнение моментов (внешних и инерционных), а в учебной литературе обычно приводятся частные случаи этой формулы с предопределенными знаками моментов для конкретных случаев.
Ниже приведен исходный текст Pascal-программы окончательного расчета электропривода штабелирующего стола.
Program PFU;
{ МОЗЧМ, Фищенко, 11-12-2003 г
Программа "PFU"
Расчет привода металлургических машин
Штабелирующий стол }
Uses PRIVOD;
Var r :Real; {Радиус реечной шестерни}
Procedure PEREVOD;{ В подпрограмме задаются коэффициенты приведения
перемещений PRF, скоростей PRW и ускорений PRE к одному
(выбранному) элементу механизма. При заданном среднепусковом
и тормозном моменте выбранным элементом должен быть вал
электродвигателя!!! }
Begin
PRF:=ur/r;{Коэфф.приведения перемещений к валу ЭД}
PRW:=1; {Скорость задана на валу ЭД}
PRE:=1;{Ускорение разгона-торможения вычисляется в программе}
End;
Procedure LOAD;{Определение нагрузок на валу двигателя }
{ Привод штабелирующего стола}
Const Ms=64200; Mk=60000;
Begin
For j:=1 To n Do If k2=1 Then Y[i,j]:=Y[1,j];
Mb:=-9.81*(Ms+Y[i,j]-Mk)*r; {Статический момент на реечной шестерне}
{ Приведение момента Mb к валу двигателя }
If fi*Mb<0 Then Mc:=Mb/ur/kpd1 Else Mc:=Mb*kpd2/ur;
{ Момент инерции, приведенный к валу двигателя }
Ii:=Id+(Ms+Mk+Y[i,j])*Sqr(r/ur);
Md:=Ii*e1-Mc; { Суммарный момент на валу двигателя}
End;
Procedure CYCLE;
{Подпрограмма "CYCLE"
Универсальная подпрограмма (не требует изменения).
Не включена в состав модуля, т.к. вызывает внешнюю подпрограмму "LOAD".
Определение времени разгона, торможения и
установившегося движения в данной операции}
Var Mp,Mt :Real;
Begin
If k1=1 Then wo[i]:=wo[1];
If fi>0 Then
Begin
w:=wo[i];
Mp:=Mp0;
Mt:=-Mt0;
ep:=epo;
et:=-eto
End
Else
Begin
w:=-wo[i];
Mp:=-Mp0;
Mt:=Mt0;
ep:=-epo;
et:=eto
End;
Case k3 of
1: Begin
LOAD;
ep:=(Mp+Mc)/Ii; et:=(Mt+Mc)/Ii;
tp:=w/ep; tt:=-w/et;
End;
2: Begin
tp:=w/ep; tt:=-w/et;
End;
3: Begin
ep:=w/tp; et:=-w/tt;
End;
End;
ty:=fi/w-(tp+tt)/2;
If ty<0 Then TREE;
End;
BEGIN
{InpPrivod;
SubInpPrivod; }
k:=6; k1:=1; k2:=6; n:=1; k3:=1; S:=3;
f[0]:=0; f[1]:=-0.21; f[2]:=-0.41; f[3]:=-0.61;
f[4]:=0; f[5]:=-0.4; f[6]:=0;
w0[1]:=75.9; a:=0.75; b:=0.5; dt:=0.1;
Y[1,1]:=10000; Y[2,1]:=20000; Y[3,1]:=30000;
Y[4,1]:=40000; Y[5,1]:=0; Y[6,1]:=0;
Mp0:=810; Mt0:=810; Id:=2.62; ur:=280;
kpd1:=0.58; kpd2:=0.37; tz:=115; r:=0.22;
CheckInp;
Assign(ff,'con'); { 'con' - консоль, вывод результата на экран;
для вывода результатов в файл вместо 'con' необходимо
ввести полное имя файла вывода (например 'A:\Iv.dat')}
Rewrite(ff);
Assign(fdat,'Ivanov.dat'); { 'Ivanov.dat'-полное имя файла вывода
результатов расчета в каждой операции (для построения графика) }
Rewrite(fdat);
OutPrivod;
PEREVOD;
For i:=0 To k Do
Begin
fo[i]:=f[i]*prf;
wo[i]:=w0[i]*prw;
End;
epo:=ep0*pre; eto:=et0*pre;
For i:=1 To k Do
Begin
fi:=fo[i]-fo[i-1];
fm:=f[i]-f[i-1];
CYCLE;
WriteLn(fdat);
WriteLn(fdat,' Операция ',i);
WriteLn(fdat,' t(c) fi w e Md');
WriteLn(ff,'¦',i:6, ' ¦',fm:8:3,' ¦',tp:7:3,
' ¦',ty:8:3,' ¦',tt:6:3,' ¦');
t:=dt/2;
While t<=tp+ty+tt Do
Begin
OPERATION;
LOAD;
WriteLn(fdat,t:5:2,f1/prf:8:3,w1/prw:9:3,e1/pre:10:3,Md:10:1);
It:=HR(Md);
If Abs(It)>Abs(Imax) Then Imax:=Abs(It);
z:=z+Sqr(It)*dt;
t:=t+dt;
End;
tsr:=tsr+t;
tsa:=tsa+a*(tp+tt)+ty;
End;
WriteLn(ff,fs);
Close(fdat);
If tz=0 Then tz:=tpa+tsr Else tpa:=tz-tsr;
MODE;
pv:=100*tsr/tz;
zz:=3600*k/tz;
WriteLn(ff);
If (is='Y') OR (as='y') Then
Begin
WriteLn(ff,'Эквивалентный ток -',Ie:9:1,' a');
WriteLn(ff,'Максимальный ток -',Imax:9:1,' a');
End Else
Begin
WriteLn(ff,'Эквивалентный момент -',Ie:9:1,' Н*м');
WriteLn(ff,'Максимальный момент -',Imax:9:1,' Н*м');
End;
WriteLn(ff,'Относительная продол-');
WriteLn(ff,'жительность включения -',pv:8:2,' %');
WriteLn(ff,'Число включений в час -',zz:6:0);
Close(ff);
END.
РЕЗУЛЬТАТЫ РАСЧЕТА
-
Операция
Перемещ.
(м)
Время (с)
разгона
установ
тормож
- 0.210
0.241
3.267
0.267
-0.200
0.234
3.098
0.277
-0.200
0.227
3.096
0.289
0.610
0.928
9.691
0.148
-0.400
0.249
6.455
0.256
0.400
0.271
6.453
0.236
Эквивалентный момент - 410.0 Н*м
Максимальный момент - 810.0 Н*м
Относительная продол-
жительность включения - 31.39 %
Число включений в час - 188
Кроме приведенных выше результатов программа выдает данные основных параметров работы привода (файл Ivanov.dat в текущем каталоге для приведенного выше примера). Ниже приводится фрагмент этого файла данных (лишь для 1-ой операции цикла).
Операция 1
t(c) fi w e Md
0.05 -0.000 -15.733 -314.667 -810.0
0.15 -0.003 -47.200 -314.667 -810.0
0.25 -0.008 -75.900 0.000 40.5
0.35 -0.014 -75.900 0.000 40.5
0.45 -0.020 -75.900 0.000 40.5
0.55 -0.026 -75.900 0.000 40.5
0.65 -0.032 -75.900 0.000 40.5
0.75 -0.038 -75.900 0.000 40.5
0.85 -0.043 -75.900 0.000 40.5
0.95 -0.049 -75.900 0.000 40.5
1.05 -0.055 -75.900 0.000 40.5
1.15 -0.061 -75.900 0.000 40.5
1.25 -0.067 -75.900 0.000 40.5
1.35 -0.073 -75.900 0.000 40.5
1.45 -0.079 -75.900 0.000 40.5
1.55 -0.085 -75.900 0.000 40.5
1.65 -0.091 -75.900 0.000 40.5
1.75 -0.097 -75.900 0.000 40.5
1.85 -0.103 -75.900 0.000 40.5
1.95 -0.109 -75.900 0.000 40.5
2.05 -0.115 -75.900 0.000 40.5
2.15 -0.121 -75.900 0.000 40.5
2.25 -0.127 -75.900 0.000 40.5
2.35 -0.133 -75.900 0.000 40.5
2.45 -0.139 -75.900 0.000 40.5
2.55 -0.145 -75.900 0.000 40.5
2.65 -0.151 -75.900 0.000 40.5
2.75 -0.157 -75.900 0.000 40.5
2.85 -0.163 -75.900 0.000 40.5
2.95 -0.169 -75.900 0.000 40.5
3.05 -0.175 -75.900 0.000 40.5
3.15 -0.181 -75.900 0.000 40.5
3.25 -0.187 -75.900 0.000 40.5
3.35 -0.193 -75.900 0.000 40.5
3.45 -0.199 -75.900 0.000 40.5
3.55 -0.204 -64.138 284.701 810.0
3.65 -0.208 -35.668 284.701 810.0
3.75 -0.210 -7.198 284.701 810.0
В данной таблице последовательно приведены:
Время от начала данной операции, с;
Положение выбранного элемента (в данном примере стола, м);
Скорость (в данном случае двигателя, рад/с);
Ускорение (в данном случае ротора двигателя, рад/с2;
Суммарный момент на валу электродвигателя, Нм.
Приведем эквивалентный момент к стандартному значению ПВ:
![]() ;
;
![]() .
.
Следовательно, по условиям нагрева выбранный двигатель подходит.
Время разгона привода в различных операциях цикла составляет от 0,227 до 0,929 с, что вполне обеспечивает требуемую производительность машины.
На сервере ПГТУ имеются программы расчета для данного примера в среде MathCAD (файлы Stol_p.mcd, Privod_St.mcd).