

3.12.2 Оптимальный фильтр для последовательности видеоимпульсов
Известно, что принимаемый сигнал в импульсных РЛС представляет собой последовательность радиоимпульсов. Если считать эту последовательность когерентной и подать ее на когерентный (фазовый или синхронный) детектор, то на его выходе образуется последовательность видеоимпульсов. Построим для нее оптимальный фильтр, считая огибающую последовательности прямоугольной.
Итак, сигнал представляет собой прямоугольную последовательность N прямоугольных видеоимпульсов (ВИ) (рис.3.69). В качестве оптимального фильтра для нее подберем линейную систему, импульсная характеристика (т.е. отклик на единичный импульс) которой воспроизводит в некотором амплитудном масштабе форму этого симметричного сигнала.
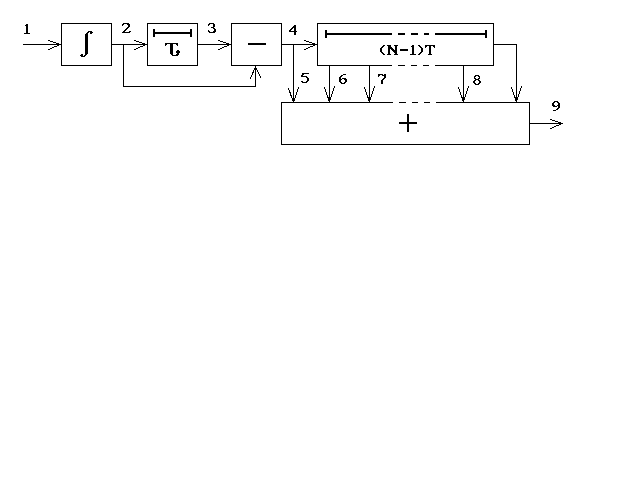
Рис.3.68. Структурная схема оптимального фильтра (ОФ) для последовательности видеоимпульсных сигналов
На рис.3.68 показана структурная схема оптимального фильтра (ОФ) для последовательности видеоимпульсных сигналов. Она состоит из фильтра, оптимальному единичному видеоимпульсу (интегрирующего, задерживающего на длительность импульса и вычитающего устройств) и системы из одного задерживающего на время (N – 1)T устройства с N – 2 равномерно расположенными отводами и суммирующего устройства.
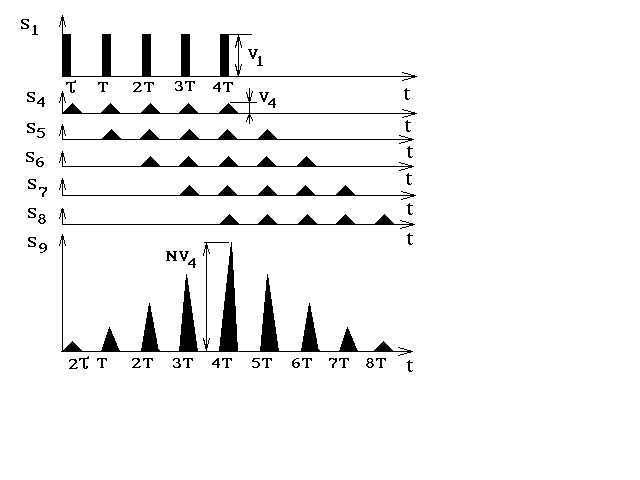
Рис.3.69. Временные диаграммы напряжений в ОФ при действии на вход последовательности N импульсов (N=5)
При действии на вход сигнала в виде последовательности прямоугольных видеоимпульсов (рис.3.69) каждый из импульсов преобразуется оптимальным ему фильтром в треугольный импульс длительности 2 и амплитуды V4 = V1.
Последовательность таких импульсов задерживается соответственно на время Т, 2Т, 3Т и, наконец, (N-1)T. Эти задержанные последовательности складываются в сумматоре с исходной и между собой, образуя треугольную (т.е. с треугольной огибающей) последовательность 2N-1 треугольных импульсов S9.
Пиковое значение выходного сигнала равно амплитуде равно амплитуде центрального импульса V9= NV4, которая в N раз превосходит пиковое значение (амплитуду) импульса на выходе оптимального фильтра для одиночного импульса.
Шумы же будут складываться в сумматоре по иному закону. Для его определения рассчитаем по формуле
![]()
автокорреляционную функцию (АКФ) шума на выходе сумматора. Так как ОФ для прямоугольного видеоимпульса (см.рис.3.70) имеет импульсную характеристику h4(t) = 1(t) – 1(t – ), то легко рассчитать АКФ выходного шума (рис.3.70):
R4(t) = (No/2) (-t) при t,
R4(t) = 0 при t .
Следовательно, два мгновенных значения шума, разделенных интервалом времени, равным длительности импульса или превышающим ее полностью некоррелированы.
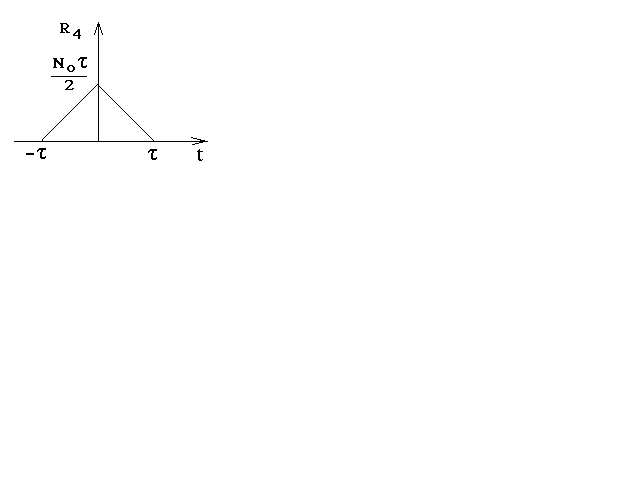
Рис.3.70. АКФ шума на выходе ОФ для прямоугольного импульса
Шум на выходе сумматора представляет собой сумму N шумовых колебаний, поступивших на его вход с ОФ для импульса в рассматриваемый момент времени и с задержками, кратными периоду повторения: 1
![]()
Поскольку Т >> , то все слагаемые выходного шума, будучи случайными, некоррелированы. Поэтому они суммируются по мощности (дисперсии):
92 = N·42.
Таким образом, в оптимальном фильтре для огибающей последовательности сигнал увеличивается в N раз по напряжению, т.е. в N2 раз по мощности, а шум – N раз по мощности. Арифметическое суммирование сигнала и алгебраическое суммирование шума объясняется регулярностью (не случайностью) первого и некоррелированностью второго. Следовательно, отношение сигнал-шум по мощности возрастает в N раз:
q92 = V92/92 = (N·V4)2/(N·42) = N·q42
Устройство, в котором суммирование в ОФ для огибающей последовательности колебаний, сдвинутых на время, кратное периоду повторения сигналов, иначе называют идеальным накопителем.