

3.9.2 Основные технические параметры приемного устройства и их влияние на боевые возможности рлс
Параметры тракта приема и фильтрации сигналов определяются параметрами основных его составляющих: приемного устройства и аппаратуры защиты от помех. Рассмотрим влияние технических параметров приемного устройства на тактические характеристики РЛС.
Под техническими параметрами будем понимать, прежде всего, электрические параметры, основными из которых являются:
предельная и пороговая чувствительности приемника или коэффициент шума;
динамический диапазон по входу и выходу;
диапазон рабочих частот;
полоса пропускания и частотная избирательность.
Чувствительность приемного устройства. Под чувствительностью приемного устройства понимают способность приемника выполнять свои функции при приеме слабого сигнала на фоне помех.
Чувствительность современных радиолокационных приемников ограничивается в основном уровнем их собственных шумов и составляет 10-12...10-15 Вт. На практике для характеристики радиолокационных приемников различают: предельную, пороговую и реальную чувствительности.
Предельной чувствительностью приемника называют минимальную мощность или напряжение сигнала, наводимого в антенне, при которых отношение сигнал/шум на выходе линейной части приемника, т.е. на выходе высокочастотного тракта (ВЧТ), равно единице.
Данный параметр характеризует, мощность сигнала на входе приемника, равную эквивалентной мощности шумов приемника, пересчитанных на его вход, с учетом мощности шумов антенны, атмосферы, космоса, Земли:
Pпред = k·Tо·Пш·(Кш − 1 + tА), (3.28)
где k = 1,38.10-23 Дж, К – постоянная Больцмана, Tо– температура антенны в градусах по шкале Кельвина, Пш - шумовая полоса пропускания приемника (обычно равна полосе пропускания УПЧ, т.е. полосе пропускания приемника), Кш – коэффициент шума приемника, tА = ТА/То – относительная температура антенны. Предельная чувствительность приемника применяется для сравнения шумовых свойств ВЧТ.
Под пороговой чувствительностью понимается минимальный сигнал, наводимый в антенне, при котором приемное устройство работает с заданными вероятностями правильного обнаружения и ложной тревоги. Таким образом, пороговая чувствительность определяется на выходе системы обработки (например, детектора) и используется для сравнения приемных устройств с одинаковой системой обработки.
Рассмотрим более подробно понятие коэффициента шума приемника Кш, служащего для оценки шумовых свойств ВЧТ приемника.
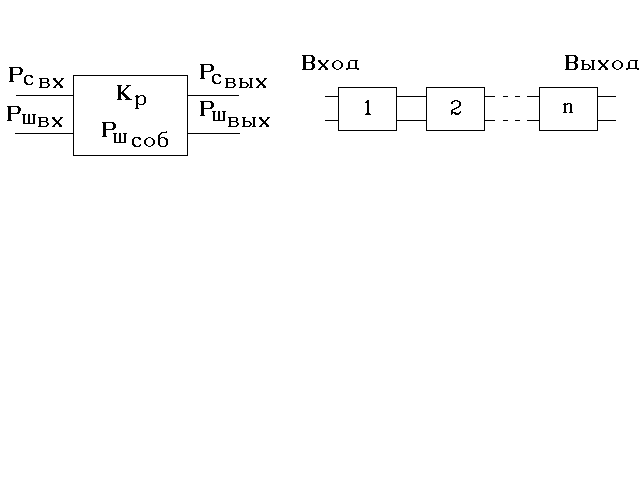
Коэффицент шума приемника это число, показывающее во сколько раз отношение сигнал-шум на выходе приемника меньше, чем отношение сигнал-шум на его входе (рис.3.53,а), т.е.
![]()
где РШвых = РШвхКр + РШсоб – мощность шума на выходе приемника, Кр = РСвых/РСвх – коэффициент усиления входного сигнала по мощности. Тогда
![]() (3.30)
(3.30)
Из формулы (3.30) следует два важных вывода: коэффициент шума приемного устройства всегда больше единицы; влияние собственных шумов на Кш тем меньше, чем больше коэффициент усиления по мощности Кр.
Представив приемник в виде каскадного соединения четырехполюсников (рис.3.53,б) можно получить выражение для коэффициента шума каскадно включенных четырехполюсников
![]() (3.31)
(3.31)
Из выражения (3.31) следует, что наибольший вклад в общий Кш вносит 1-й каскад приемника, т.е. фидер. Однако фидер «не шумит», а гасит сигнал, поэтому Кш1 = КшФ = 1/КрФ. Следовательно, для обеспечения малого Кш необходимо использовать малошумящий УВЧ Кш2 с высоким коэффициентом усиления Кр2. Тогда шумовыми свойствами последующих каскадов можно пренебречь.
Коэффициент шума определяет предельную чувствительность приемника при оптимальной полосе, поэтому получение возможно меньшего Кш всегда выгодно. Однако использование параметрических и молекулярных охлаждаемых усилителей, имеющих Кш < 1,5, не всегда возможно, поэтому в РЛС используют УВЧ на неохлаждаемых усилителях с практически достижимым коэффициентом шума 3...5. Влияние чувствительности приемника на дальность обнаружения РЛС хорошо известно из уравнения радиолокации.
а) б)
Рис.3.53. Определение коэффициента шума приемника.
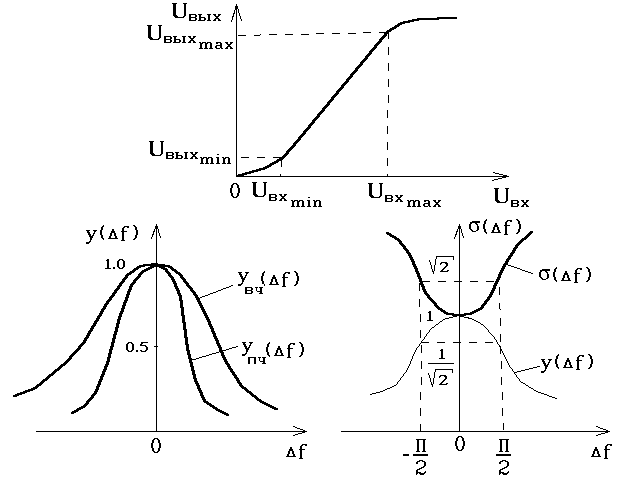
Динамический диапазон приемника РЛС. Под динамическим диапазоном приемника понимают диапазон возможных значений входного сигнала, при котором обеспечивается линейное усиление сигнала (приемник работает с допустимой величиной нелинейных искажений). Минимальный уровень входного сигнала ограничивается уровнем внутренних шумов приемника, т.е. предельной чувствительностью. Максимальный уровень ограничен допустимыми нелинейными искажениями в каскадах приемника. Динамический диапазон (ДД) приемника определяется по амплитудной характеристике (АХ) приемника (рис.3.54,а) по формуле
ДД, дБ = 20·lg UВХmax/UВХmin = 10·lg PВХmax/PВХmin. (3.32)
б) в)
Рис.3.54. Нормированные АЧХ трактов высокой (преселектора) и промежуточных частот приемника.
Относительное изменение уровней помех и полезных сигналов на входе приемника в обычных условиях может составлять 80-100 дБ. Еще сложнее дело обстоит при работе в условиях сложной помеховой обстановки, когда диапазон изменения входных воздействий может составлять 140-160 дБ. Для увеличения ДД применяют ряд мер, основными из которых являются: выбор схем УВЧ с линейной характеристикой в широком диапазоне входных сигналов; применение схем АРУ различных типов; применение усилителей с логарифмическими амплитудными характеристиками и т.д.
Наибольшее распространение получили схемы АРУ с обратной связью. Для придания цепям АРУ пороговых свойств, т.е. их включения только при определенной амплитуде сигнала, цепи АРУ запирают принудительным смещением и отпирают только после того, как напряжение сигнала превысит напряжение запирания. Подобные системы АРУ называют задержанными.
В обзорных РЛС уровень внешних помех может сильно изменяться в зависимости от направления антенны, длины волны и т.д. Для выравнивания уровня выходных шумов в приемниках используют АРУ по шумам или ШАРУ. Быстродействие системы ШАРУ согласуют с темпом обзора так, чтобы система успевала отработать изменение уровня шумового фона.
Характерной особенностью схем ШАРУ является то, что с их помощью стабилизируется не уровень входного полезного сигнала, а интенсивность шумового фона. Для исключения влияния отраженных полезных сигналов на работу системы ШАРУ используется временное стробирование шумов и регулирование осуществляется по шумовым сигналам, принимаемым на временных интервалах, соответствующих максимальным задержкам полезных сигналов. ШАРУ целесообразно использовать в тех случаях, когда на РЛС воздействуют непрерывные помеховые сигналы, близкие к стационарным. Применение систем ШАРУ в этих условиях обеспечивает стабилизацию уровня ложной тревоги при обнаружении полезных сигналов. Это, в свою очередь, обеспечивает стационарность потока ложных целей и тем самым исключает перегрузки вычислительных средств, с помощью которых осуществляется траекторная обработка информации.
В обзорных РЛС для уменьшения маскирующего действия отражений от Земли и местных предметов применяют временную АРУ (ВАРУ). Суть ее заключается в том, что по мере увеличения дальности до участка подстилающей поверхности усиление приемника плавно (по заранее составленной программе) увеличивается, доходя до максимального значения на дальности, где отражения от Земли и местных предметов не наблюдаются.
Необходимость автоматической обработки сигналов в условиях изменяющегося во времени помехового фона требует обеспечения стабильности уровня ложной тревоги в каждом элементе разрешения пространства. Нестабильность вероятностей ложных тревог приводит к перегрузке вычислительных средств вторичной обработки, неустойчивому сопровождению целей и появление ложных траекторий.
Использование систем временного автоматического регулирования (ВАРУ) позволяет регулировать лишь средние значения пассивных помех в зависимости от дальности до цели. Система ШАРУ инерционна и фиксирует уровень помехового фона лишь в среднем. Усилители с нелинейными амплитудными характеристиками исключают значительные выбросы сигналов, в определенной степени способствуют стабилизации уровня ложных тревог, однако полностью не решают эту задачу, поскольку их главное назначение состоит в расширении динамического диапазона при минимальных амплитудно-фазовых искажениях полезных сигналов. Фиксирование уровня ложных тревог в РЛС решается с помощью схем автоматического регулирования порога обнаружителя.
Диапазон рабочих частот приемника – это область частот, в пределах которой обеспечивается его функционирование с заданными параметрами. Перестройка рабочих частот осуществляется обычно изменением емкости или индуктивности колебательных систем ВЦ, УВЧ и гетеродина.
Полоса пропускания и частотная избирательность. Избирательностью приемника называют способность его выделять сигнал и ослаблять воздействие мешающих сигналов и помех. На практике используют пространственную, амплитудную, временную, частотную избирательность. Наибольшее распространение получила частотная избирательность, она основана на различии в частоте сигнала и помехи.
Характеризуется частотная избирательность нормированной АЧХ трактов высокой (преселектора) и промежуточных частот и приемника в целом (рис.3.54, б):
y(f) = K(f)/Kо.
Основная избирательность супергетеродинного приемника определяется трактом промежуточной частоты, т.е. УПЧ (последнего УПЧ при многократном ПЧ). Количественно избирательность приемника оценивается величиной ослабления при заданной частотной расстройке f:
(f) = 1/y(f) = Kо/K(f). (3.33)
Избирательность приемника обратно пропорциональна его нормированной АЧХ. Зависимость (f) (рис.3.54,в) называют характеристикой избирательности, а конкретное значение при фиксированной расстройке (f = const) - избирательностью приемника. Ширина характеристики избирательности, отсчитанная по уровню (f) = 0,707, определяет полосу пропускания приемника (П).
Рассмотрим пример. Пусть на входе радиолокационного приемника поступает радиоимпульс прямоугольной формы длительностью и с известным АЧС. Эффективность функционирования приемника в целом будем характеризовать отношением сигнал/шум на выходе его линейной части.
Для выполнения поставленной задачи форма и ширина АЧХ преселектора должны удовлетворять двум основным условиям: обеспечивать приблизительно равномерное усиление в диапазоне возможных частот прихода сигнала и его предварительную частотную избирательность. Для борьбы с наиболее опасной частотой - частотой зеркального канала – следует применять преселекторы с высокой избирательностью, повышать промежуточную частоту и переходить к многократному преобразованию частоты (разумно сочетать достоинства большой и малой промежуточных частот). Следует учитывать, что при каждом преобразовании частоты возникают свои побочные каналы приема.
Максимально возможное отношение сигнал/шум может быть обеспечено, если АЧХ УПЧ с точностью до константы повторяет АЧС сигнала. В силу сложности технической реализации устройств с требуемыми АЧХ на практике используют УПЧ с АЧХ близкими к прямоугольным. Полоса пропускания такого УПЧ, должна составлять П = 1.37/и (эта формула впервые получена профессором Сифоровым В.И.) . При этом обеспечиваются минимальные потери в отношении сигнал/шум (0.8 дБ) и наилучшая избирательность.
АЧХ ВУС должна быть равномерной в полосе частот от нуля до Fмакс для обеспечения неискаженного усиления видеоимпульса на выходе детектора (чтобы не «потерять» импульсную структуру сигнала).
Влияние технического состояния элементов приемного устройства на боевые возможности РЛС.
Основное влияние приемное устройство оказывает на дальность обнаружения воздушных объектов, эффективность работы аппаратуры защиты от помех, ошибки измерения координат и ухудшение разрешающей способности РЛС.
Выход из строя приемного устройства приводит к небоеготовности РЛС. Неисправность блоков УВЧ, преобразователей частоты, УПЧ, детекторов, системы АПЧ приемника приводит к выходу из строя РЛС. Нарушение нормальной работы схем когерентного канала снижает возможности РЛС по защите от пассивных помех.
Изменение параметров основных элементов приемного тракта приводит к изменению отдельных показателей боевых возможностей РЛС. Так, ухудшение чувствительности приемного устройства сказывается на снижении дальности обнаружения целей. Влияние изменения величины коэффициента шума (чувствительности) приемника на дальность обнаружения оценивается по основной формуле радиолокации. Ухудшение (увеличение) коэффициента шума вызывает сжатие зоны обнаружения.
В качестве примера в табл.3.2 приведена зависимость дальности обнаружения ПРВ-16 от коэффициента шума приемника.
Таблица 3.2
|
Коэффициент шума |
7 |
8 |
9 |
9,5 |
10 |
11 |
12 |
13 |
14 |
|
Дальность обнаружения в % |
100 |
97 |
94 |
92 |
91 |
89 |
87 |
85 |
84 |
Ухудшение точности работы системы АПЧ, ее неверная настройка приводит к тому, что некоторые составляющие основной частоты частотного спектра сигнала оказываются за пределами полосы пропускания УПЧ. Это вызывает уменьшение амплитуды, увеличение длительности и искажению формы сигнала, а следовательно, и снижение дальности обнаружения объектов, ухудшение разрешающей способности и точности измерения координат.
Стабильность работы тракта когерентного гетеродина влияет на эффективность работы систем защиты от пассивных помех и показатели помехозащищенности РЛС. В свою очередь, стабильность работы когерентного канала и других элементов приемника во многом зависит от постоянства величин и частоты источников питания, наличия экранирования схем, обеспечения виброустойчивости и другое. Выход из строя пеленгационного канала или его отдельных элементов исключит возможность определения и выдачи пеленга на ПАП, снизит возможности РЛС по работе в условиях АШП.
Выход из строя аппаратуры защиты от пассивных помех, а также некачественная ее настройка, снижает помехозащищенность РЛС. Так, нарушение нормальной работы системы СДЦ приводит к некачественной компенсации пассивных помех. Следует учитывать, что включение СДЦ ухудшает соотношение сигнал/шум и чувствительность приемного тракта в целом, что приводит к частичному снижению дальности обнаружения целей. При плохой настройке аппаратуры защиты от НИП помехи не будут скомпенсированы, т.е. они будут создавать на экране индикатора засветы в виде полос или перемещающихся отметок и тем самым будут затруднять работу оператора, а эхо-сигналы целей могут также частично подавляться. Это приводит к резкому ухудшению наблюдаемости отметок от целей и условий работы оператора, снижению возможностей систем защиты от НИП и помехозащищенности РЛС.
Индикаторное устройство, его параметры и режимы работы оказывают влияние на дальность обнаружения целей, точностные характеристики и разрешающие способности РЛС. Выход из строя индикаторного устройства исключит возможность измерения координат воздушных объектов. Высокая точность измерения координат обеспечивается только тщательной калибровкой напряжений устройств развертки, необходимым качеством фокусировки луча ЭЛТ, правильным подбором масштаба отображения воздушной обстановки.
Таким образом, рассмотренные основные технические параметры приемных устройств оказывают большое влияние на боевые возможности РЛС. Следует иметь ввиду, что принципиальная необходимость и специфика условий согласования приемных каналов РЛС обнаружения поразному сказывается на структуре приемных устройств в случае простых и сложных, импульсных и непрерывных зондирующих сигналов.
Ухудшение любого из перечисленных параметров приводит к увеличению потерь энергии полезного сигнала (снижения отношения сигнал-шум) в том или ином элементе тракта. Поэтому, выбирая структуру построения тракта приема и выделения сигналов из помех и параметры его элементов, стремятся обеспечить минимизацию потерь в тракте при приемлемых конструктивных, технологических и экономических показателях.