

3.13 Когерентное накопление радиолокационных сигналов
3.13.1 Оптимальная и квазиоптимальная фильтрация когерентных последовательностей импульсных сигналов
Когерентные последовательности радиоимпульсных сигналов могут быть подвергнуты как оптимальной, так и квазиоптимальной фильтрации.
На основе взаимного соответствия оптимальных фильтров для радиосигнала и его огибающей и структуры оптимального фильтра для последовательности видеоимпульсов получим структурную схему оптимального фильтра для последовательности радиоимпульсов (рис.3.79), на котором радиочастотный оптимальный фильтр для одиночного сигнала сокращенно обозначен РОФОС. На рис.3.79 и рис.3.80 показаны структурные схемы оптимальной и квазиоптимальной фильтрации когерентных последовательностей радиоимпульсных сигналов.
Основная схема осуществления этой схемы состоит в выполнении устройства задержки на время tз = (N – 1)·T с N – 2 отводами, полосой F = 2/ с стабильностью задержки tз < Tо = 1/fо, где fо – несущая частота задерживаемых колебаний (15-20 МГц и более).
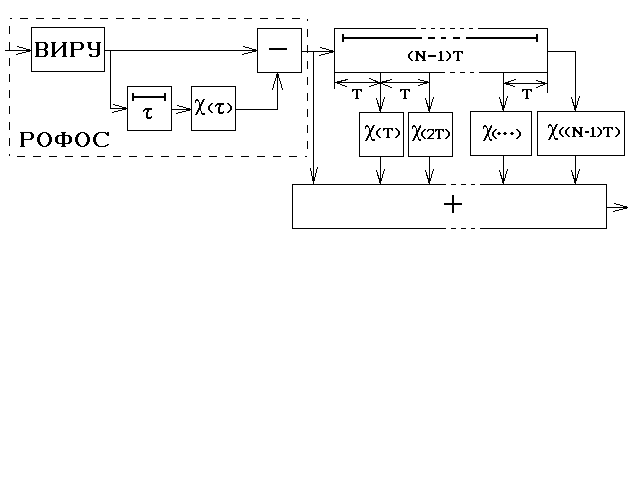
Рис.3.79. Структурная схема оптимальной фильтрации когерентных последовательностей радиоимпульсных сигналов
Если, например, Т = 1мс, N = 20 и = 1 мкс, то tз = 0,019 с, число отводов – 18, полоса – 2 МГц, а нестабильность tз 5 нс. Столь высокие требования к стабильности задержки задерживающего устройства и его элементов объясняются тем, что в рассматриваемом фильтре должно происходить синфазное сложение колебаний, которое могут нарушить температурные нестабильности устройства задержки. Поэтому для нормальной работы фильтра нестабильности должны быть много меньше периода колебания несущей частоты.
В оптимальных фильтрах для последовательности видеоимпульсов требования к стабильности элементов устройства задержки значительно более легкие. Так как сложение импульсов происходит на видеочастоте, то для нормального функционирования фильтра достаточно взаимного временного перекрытия суммируемых импульсов, что выполняется при условии: tз < t1, где t1 – длительность суммируемых импульсов, которая имеет порядок микросекунды. Однако выполнение даже этого условия требует принятия специальных мер по стабилизации времени задержки задерживающего устройства путем термостатирования.
Несколько упрощается реализация устройства когерентной обработки последовательности радиоимпульсов, если заменить идеальный радиочастотный накопитель радиочастотным рециркулятором (рис.3.80), являющимся радиочастотным аналогом рассмотренного ранее рециркулятора, так как в этом случае устройство задержки выполняется на время Т и не имеет дополнительных отводов. Однако осуществление и такого устройства с нестабильностями, много меньшими периода несущего колебания,- весьма сложная и практическая невыполнимая задача.
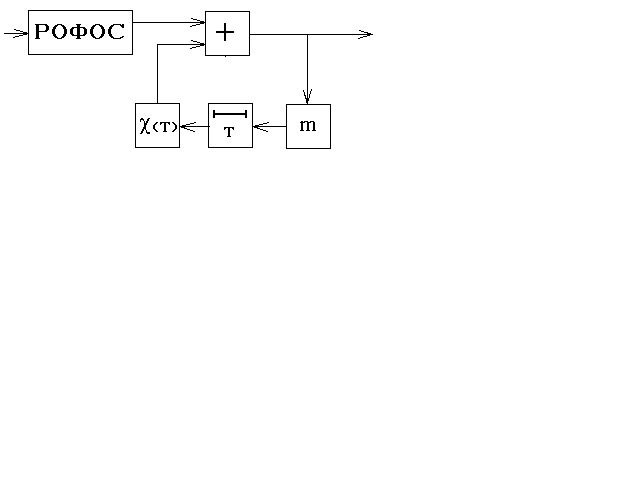
Рис.3.80. Структурная схема квазиоптимальной фильтрации когерентных последовательностей радиоимпульсных сигналов
Таким образом, в этом и заключается главный недостаток оптимальных фильтров для когерентных последовательностей радиоимпульсов и вообще фильтрового метода их оптимальной обработки.
3.13.2 Корреляционно-фильтровая обработка когерентной последовательности радиоимпульсов
Известно, что оптимальное обнаружение сигнала s1 = V1(t) cos (ot + ) на фоне белого шума сводится к вычислению корреляционного интеграла
![]()
т.е. к перемножению принимаемого колебания u1(t) на ожидаемый сигнал и интегрированию полученного произведения.
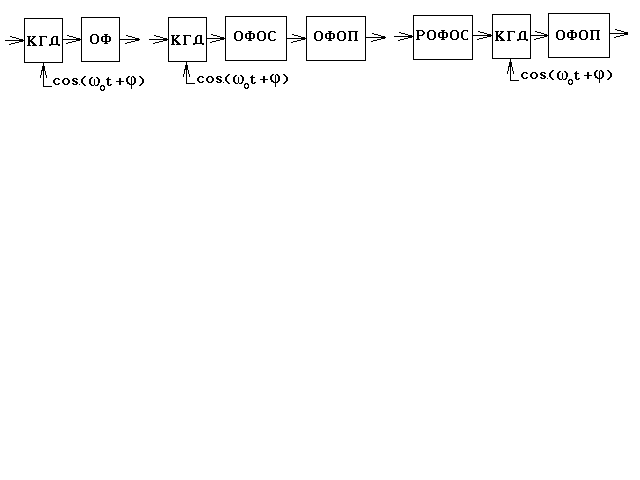
Это вычисление может быть произведено или непосредственно с помощью перемножителя и интегратора (корреляционный метод), или посредством оптимального этому сигналу фильтра (фильтровой метод), или с помощью корреляционно-фильтрового метода. При одном из вариантов его применения умножение принимаемого колебания на несущее cos(ot·) производится когерентном детекторе (КГД), управляемом указанным колебанием и преобразующем принимаемое колебание в видеочастотное. Фильтрация последнего осуществляется с помощью оптимального фильтра (ОФ), построенного для видеочастотной огибающей сигнала V1(t) и работающего на видеочастоте (рис.3.81,а), вследствие чего существенно упрощается его осуществление.
На рис.3.81 показаны различные структурные схемы корреляционно-фильтровой обработки когерентных последовательностей радиоимпульсных сигналов.
а) б) в)

г) д)
Рис.3.81. Структурные схемы корреляционно-фильтровой обработки когерентных последовательностей радиоимпульсных сигналов
Если принимаемый сигнал представляет собой последовательность радиоимпульсов, то ОФ для его видеочастотной огибающей состоит из оптимального фильтра для одиночного видеоимпульсного сигнала ОФОС и оптимального фильтра для огибающей последовательности импульсов ОФОП (идеального накопителя), которые располагаются после КГД (рис.3.81,б). Но при таком построении системы обработки когерентный детектор работает в тяжелых условиях, т.к. на его вход поступают не только слабые сигналы, но и белый шум с его теоретически неограниченной мощностью, а также другие помехи. Чтобы облегчить его работу, оптимальный фильтр для одиночного импульса переносят из видеотракта в радиотракт и, преобразуя его в радиочастотный РОФОС, ставят перед когерентном детектором КГД (рис.3.81,в). Ввиду линейности когерентного детектора и фильтра схемы на рис.3.81,б и рис.3.81,в полностью эквивалентны.
При случайной начальной фазе система оптимальной обработки имеет два квадратурных канала (рис.3.81,г), как и структурная схема оптимального обнаружения такого сигнала. Двухканальной является и структурная схема квазиоптимальной обработки данного сигнала (рис.3.81,д), на котором накопительное устройство сокращенно обозначено НУ.
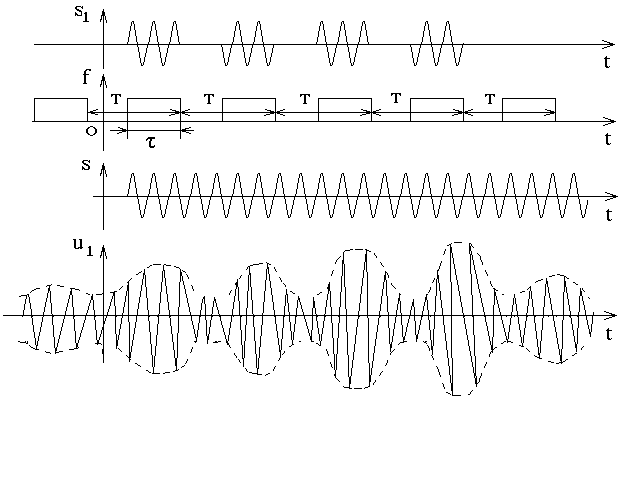
Рассмотрим еще одну возможность корреляционно-фильтрового метода при оптимальной обработке когерентной последовательности радиоимпульсных сигналов. Для этого представим упомянутую последовательность s1(t) в виде произведения радиоимпульса s(t), длительность которого равна длительности NT последовательности, и неограниченной периодической последовательности f(t) видеоимпульсов, длительность и период повторения которых равны соответственно длительности и периоду повторения радиоимпульсов последовательности.
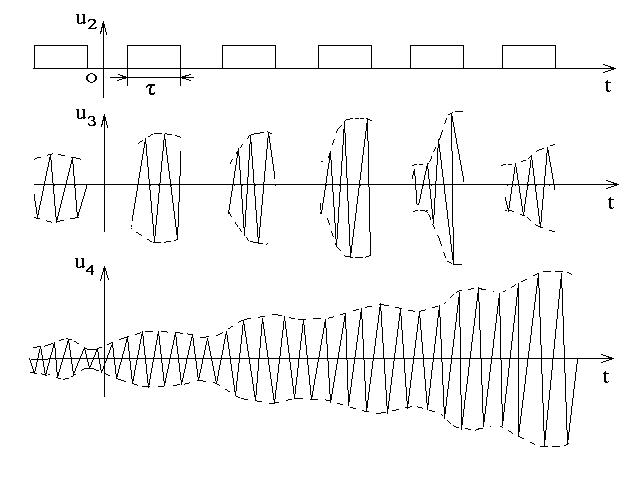
На рис.3.82 показано представление когерентной последовательности радиоимпульсов произведением двух функций (а) и временные диаграммы напряжений (б) в системе, представленной на рис.3.83.
Поэтому вычисление корреляционного интеграла
![]()
можно произвести перемножением принимаемого колебания u1(t) на стробирующую функцию f(t) и фильтрации в оптимальном фильтре для сигнала s(t). Указанное перемножение выполняется во временном селекторе ВС, управляемом селекторными импульсами, которые воспроизводят стробирующую функцию f(t) и вырабатываются генератором селекторных импульсов ГСИ (рис.3.83).
В этой схеме принимаемое колебание стробируется временным селектором, пропускающим те его части, которые совпадают с сигналом, и исключающим все остальные, которые могут состоять лишь из шумов и помех. Образовавшиеся таким образом радиоимпульсы поступают в оптимальный фильтр, растягивающий их до длительности NT, вследствие чего они накладываются друг на друга и когерентно суммируются (рис.3.82,б).
На практике оптимальный фильтр для радиоимпульса s(t) заменяется квазиоптимальным фильтром с полосой пропускания F = 0,4/NT. Главное достоинство рассматриваемой системы обработки заключается в отсутствии устройства задержки на квазипериод повторения радиоимпульсов сигнала, что может значительно упростить ее реализацию.
Однако, как и всякая система с переменными параметрами, она не обладает инвариантностью по отношению к времени прихода сигнала, ибо в ней оптимально обрабатываются лишь импульсные сигналы, совпадающие с селекторными импульсами. Поэтому для обработки импульсных сигналов с заранее неизвестным временем прихода приходится выполнять схему многоканальной, в которой каналы различаются лишь временным положением селекторных импульсов. Это усложняет и удорожает схему, снижает ее надежность.
а)
б)
Рис.3.82. Представление когерентной последовательности радиоимпульсов произведением двух функций (а) и временные диаграммы напряжений (б) в системе

Рис.3.83
Данные схемы требуют точного знания частоты несущего колебания. Последняя обычно известна в системе обработки сигналов, отраженных только от неподвижных объектов.