

3.11.5 Потери, обусловленные неоптимальностью формы ачх
Если отраженный сигнал представляет собой прямоугольный импульс, решение о наличии цели принимается на индикаторе с амплитудной отметкой или автоматически, а фильтр приемника имеет прямоугольную АЧХ (полосовой фильтр) то из данного соотношения следует:
Lпр2 = (·Пф·и) / 4·Si2(·Пф·и/2),
где
![]() – интегральный синус.
– интегральный синус.
Данная зависимость представлена на рис.3.66 (кривая 2). Анализ этой зависимости показывает, что минимальное значение коэффициента потерь (порядка 0.8 дБ) достигается при Пф опт=1.37/и . Если решение о наличии цели принимается по индикатору с яркостной отметкой (кривая 3), то минимальные потери составляют 2.3 дБ при Пф опт=1.2/и . Увеличение потерь на 1.5 дБ обусловлено тем, что оператор реагирует не на пиковую, а на среднюю яркость отметки.
Кривая 1 рис.3.66 отражает зависимость коэффициента потерь для фильтра с колокольной АЧХ. Минимум потерь (порядка 0.5 дБ) достигается при этом при Пф опт = 0.8/.и.
Из рис.3.66 также следует, что при отклонении полосы пропускания линейной части приемника на 30-40% коэффициент потерь Lпр2 увеличивается не более чем на 0.5 дБ.
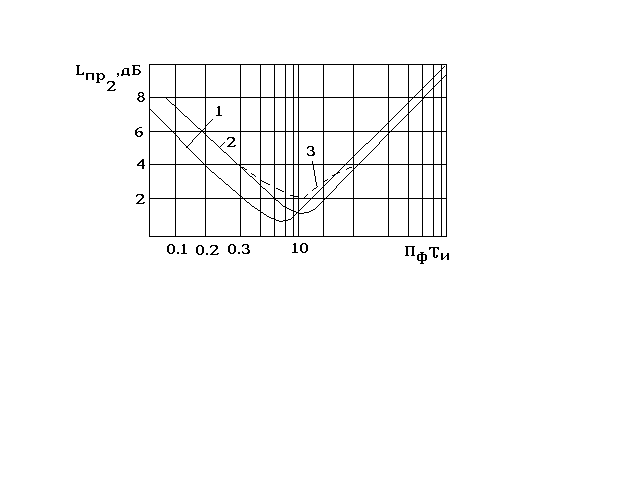
Рис.3.66. Зависимость Lпр2 = f(Пф.и).
Меры, обеспечивающие снижение Lпр2 зависят от ширины полосы пропускания линейной части приемника. Если она меньше оптимальной, то возникающие при этом потери уменьшить нельзя. Если полоса пропускания выбрана больше оптимальной, потери этого рода можно частично компенсировать путем выбора полосы пропускания видеоусилителя из условия:
Пвус = Пф опт/2,
где Пф опт определяется в основном полосой пропускания УПЧ.
3.11.6 Потери, обусловленные расстройкой приемника по частоте
В процессе работы РЛС частоты передатчика и гетеродина неизбежно изменяются под воздействием различных дестабилизирующих факторов. К основным таким факторам относятся:
влияние колебаний температуры, влажности, давления и механических воздействий на параметры резонансных элементов передатчика и гетеродина;
нестабильность источников питания передатчика и гетеродина;
изменение нагрузки передатчика за счет непостоянства связи с антенной при ее сканировании.
В результате относительного изменения частот передатчика и гетеродина разностная частота будет отличаться от номинального значения промежуточной частоты и спектр отраженного сигнала частично или полностью уйдет за пределы полосы пропускания УПЧ.
На рис.3.67 представлены графики, иллюстрирующие зависимость коэффициента потерь Lпр4 от степени относительной расстройки частот передатчика и гетеродина для полосового фильтра (кривая 1) и фильтра с колокольной АЧХ (кривая 2). Из рис.3.67 видно, что при неблагоприятных условиях расстройка приемного тракта по частоте может привести к существенным потерям. Обеспечить нормальный прием сигнала в этих условиях можно путем:
расширения полосы пропускания УПЧ;
стабилизации разностной частоты передатчика и гетеродина.
Первый путь приводит к возрастанию коэффициента потерь Lпр2, поэтому наиболее приемлемый путь второй.
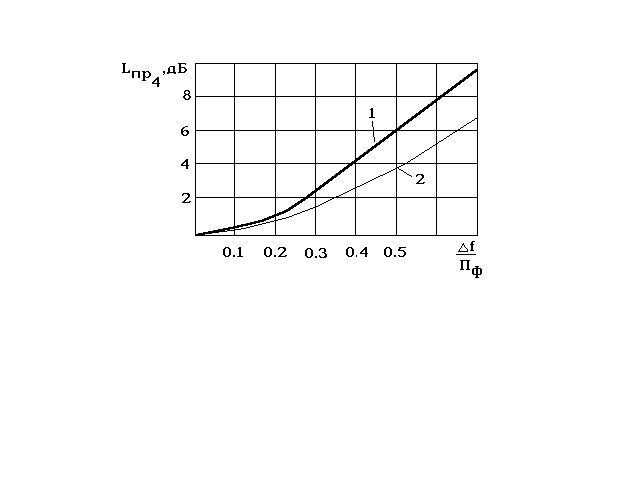
Рис.3.67. Зависимость Lпр4 = f(f/Пф).
Постоянство разностной частоты можно обеспечить за счет: стабилизации частот передатчика и местного гетеродина; автоматического слежения частоты одного генератора за изменением частоты другого.
Первый вариант используется в РЛС с передатчиком, построенным по схеме задающий генератор-усилитель мощности, а второй – В РЛС с мощным автогенератором. Технически задача стабилизации разностной частоты решается с помощью систем АПЧ.