

6.. Системи відліку . Натуральні координатні осі
Система відліку — це тіло відліку, пов’язана з ним система координат і засіб для вимірювання часу.
Часто застосовуються інерційні системи відліку, які складаються з тіла відліку, що рухається інерційно, декартової системи координат і вимірювальних засобів, що описуються законами класичної механіки.
Просторова система координат X, У, Z, тіло відліку, з яким вона пов’язана, та прилад для вимірювання часу (годинник) утворюютьсистему відліку, відносно якої розглядається рух тіла (рис. 1.1).
 (1.1)
(1.1)
Тілом відліку називають тіло, відносно якого розглядається зміна положення інших тіл у просторі.
Систему відліку можна вибрати довільно. У кінематиці всі системи відліку рівноправні. В задачах динаміки можна використовувати будь-які системи відліку, але найбільш зручніінерціальні системи відліку, оскільки в них характеристики руху мають простіший вигляд.
Тіловідліку, пов'язана з ним система координат і прилад для відлічування часу утворюють систему відліку.
7.. Прискорення точки при натуральному способі задання руху
Визначення швидкості та прискорення точки при натуральному способі завдання руху точки.При натуральному способі завдання руху задається траєкторія точки і закон її руху уздовж траєкторії у видіs = f(t).
У
цьому випадку значення векторів
 і
і визначають
за їх проекціями не на осі нерухомої
системи відліку Охуz,
а
на
осі рухомої
прямокутної системи координат Mnb,щомає
початок у точціМ
і
рухається разом з нею по траєкторії
(рис. 1.5). Ці осі є осями натурального
тригранника, спрямовані
в такий
спосіб:
вісь М
(дотична)
– по дотичній до траєкторії у бік
додатного відліку відстані s;
вісь
Мп(головна
нормаль) – по нормалі до траєкторії,
що
лежить у дотичній площині, в бік угнутості
траєкторії; вісь Mb(бінормаль)
– перпендикулярна до перших двох осей,
утворюючи з
ними праву систему осей. Тут
визначають
за їх проекціями не на осі нерухомої
системи відліку Охуz,
а
на
осі рухомої
прямокутної системи координат Mnb,щомає
початок у точціМ
і
рухається разом з нею по траєкторії
(рис. 1.5). Ці осі є осями натурального
тригранника, спрямовані
в такий
спосіб:
вісь М
(дотична)
– по дотичній до траєкторії у бік
додатного відліку відстані s;
вісь
Мп(головна
нормаль) – по нормалі до траєкторії,
що
лежить у дотичній площині, в бік угнутості
траєкторії; вісь Mb(бінормаль)
– перпендикулярна до перших двох осей,
утворюючи з
ними праву систему осей. Тут
 відповідно орти (одиничні вектори) осей
системи координат
відповідно орти (одиничні вектори) осей
системи координат .
.
Вектор швидкості при натуральному способі завдання рухуточки буде
 (1.17)
(1.17)
де ds– елементарне переміщення точки по дузі траєкторії.
Введемо
одиничний вектор
 ,
спрямований
по дотичній до траєкторії точки
у бік додатного відліку відстані s.
,
спрямований
по дотичній до траєкторії точки
у бік додатного відліку відстані s.
Тоді
 або
або , (1.18)
, (1.18)
де
 , (1.19)
, (1.19)
тобто
 –числове
(алгебраїчне)
значення швидкості в даний момент часу,
яке дорівнює першій похідній
від відстані (криволінійної координати)
s цієї точки
за часом.
–числове
(алгебраїчне)
значення швидкості в даний момент часу,
яке дорівнює першій похідній
від відстані (криволінійної координати)
s цієї точки
за часом.
Величина ,
будучи
проекцією вектора
,
будучи
проекцією вектора
 на
дотичну, буде мати знакплюс
або
мінус: якщо
на
дотичну, буде мати знакплюс
або
мінус: якщо
 >
0, то швидкістьспрямована
у бік додатного відліку відстані s;
якщо
>
0, то швидкістьспрямована
у бік додатного відліку відстані s;
якщо
 <0–
у протилежну сторону.
Отже, знак
<0–
у протилежну сторону.
Отже, знак
 визначає
напрям вектора
визначає
напрям вектора
 відносно
осі
відносно
осі .
На рис. 1.5 вектор
.
На рис. 1.5 вектор зображений
для випадку, коли
зображений
для випадку, коли >
0,
тобто
напрями
вектора
>
0,
тобто
напрями
вектора
 й
осі
збігаються. З (1.18) маємо,
що модуль швидкості
й
осі
збігаються. З (1.18) маємо,
що модуль швидкості
 буде
буде .
.
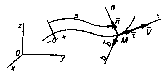
Рис. 1.5
Визначимо прискорення точки за формулою (1.9), продиференціючи за часом вираз (1.18):
 . (1.20)
. (1.20)
Знайдемо
 ,
,
де
 – елементарнийкут
повороту вектора
– елементарнийкут
повороту вектора
 ;
– радіус кривини траєкторії в розглянутій
точці.
;
– радіус кривини траєкторії в розглянутій
точці.
Підставивши цей вираз в (1.20), маємо
 . (1.21)
. (1.21)
Отже,
прискорення точки
дорівнює геометричній сумі двох векторів,
один з яких
 спрямований
по дотичній (дотичне прискорення), а
другий – вектор
спрямований
по дотичній (дотичне прискорення), а
другий – вектор
 спрямований
по головній нормалі (нормальне
прискорення):
спрямований
по головній нормалі (нормальне
прискорення):
 . (1.22)
. (1.22)
Площина, що проходить через дотичну і головну нормаль, єдотичною до розташованого в ній вектора прискорення точки.
Проекції
вектора
 на осі натурального тригранникавизначаються
за формулами:
на осі натурального тригранникавизначаються
за формулами:
 . (1.23)
. (1.23)
Оскільки
складові і
і
 взаємно
перпендикулярні, для модуля вектора
взаємно
перпендикулярні, для модуля вектора одержимо:
одержимо:
 . (1.24)
. (1.24)
На
підставі формул (1.23) маємо:
величина (проекція
вектора
(проекція
вектора
 на напрям)
може бути додатною, від’ємною або
дорівнювати нулю; величинааппо
криволінійній траєкторії завжди додатна,
цим визначається,
що складова
на напрям)
може бути додатною, від’ємною або
дорівнювати нулю; величинааппо
криволінійній траєкторії завжди додатна,
цим визначається,
що складова
 буде
завждиспрямована
у бік угнутості кривої;
величинааb(проекція
прискорення на бінормаль) дорівнює
нулю.
буде
завждиспрямована
у бік угнутості кривої;
величинааb(проекція
прискорення на бінормаль) дорівнює
нулю.
Кут
відхилення
вектора
 від нормаліМпвизначаємо
за формулою
від нормаліМпвизначаємо
за формулою
 , (1.25)
, (1.25)
його
значення може бути в інтервалі
 .
.
Якщо
 <
0, то
<
0і вектор
<
0, то
<
0і вектор
 відхилений від нормаліМ
в
сторону,
протилежну
додатному напряму осі М(рис.
1.6,а);при
відхилений від нормаліМ
в
сторону,
протилежну
додатному напряму осі М(рис.
1.6,а);при
 >
0кут
>0
і вектор
>
0кут
>0
і вектор
 відхиляється від нормалі занапрямом
осі М
(рис.
1.6,в);якщо
відхиляється від нормалі занапрямом
осі М
(рис.
1.6,в);якщо
 =
0, то
=
0і вектор
=
0, то
=
0і вектор
 спрямований
по нормалі Мп(рис.
1.6,б).
спрямований
по нормалі Мп(рис.
1.6,б).
У загальному випадку рухуточки може змінюватися і модуль, і напрям вектора швидкості. Аналіз формул (1.23) приводить до висновку: дотичне прискорення характеризує зміну швидкості за величиною, нормальне прискорення – зміну напряму вектора швидкості.
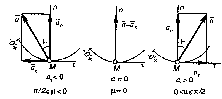
а) б) в)