

5.2 Настроювання регулятора струму якоря
Для реалізації регулятора струму якоря використовується комірка РТ – 1АИ, зображена на рисунку 4.2
Передавальна функція регулятора струму якоря має вигляд:
![]()
Регулятор струму якоря реалізується безпосередньо на операційному посилювачі ОУАИ. Сталу часу ТЯ отримаємо за допомогою резисторів R39 = 70 кОм та R40 = 3 кОм
![]() ,
,
де С16=1 мкФ.
Сталу
часу інтегрування
![]() отримаємо, встановив
отримаємо, встановив![]() =42,7
кОм та
використовуючи
у
якості
входного опору
R35=62
кОм:
=42,7
кОм та
використовуючи
у
якості
входного опору
R35=62
кОм:
![]()
Входом
ОУАИ є канал В8, виходом – В10. Напруга
завдання
![]() подається на В6, а сигнал зворотного
зв’язку за струмом якоря – на А6. Вихід
з ОУА2 є канал В26. Цей вихід з’єднан
з регулятором струму якоря. У якості
давачів струму використовується комірка
ДТ – 3АИ, що наведена на рисунку 4.1.
подається на В6, а сигнал зворотного
зв’язку за струмом якоря – на А6. Вихід
з ОУА2 є канал В26. Цей вихід з’єднан
з регулятором струму якоря. У якості
давачів струму використовується комірка
ДТ – 3АИ, що наведена на рисунку 4.1.
5.3 Реалізація регулятора швидкості
У реалізації РШ використовуємо ячейку РШ−1АИ, зображену на рисунку 4.5
Передавальна функція регулятора швидкості має вигляд:

Тоді
![]()
![]() ;
;
![]() ;
;![]()
Операційні
підсилювачі А3 та А4 створюють схему
жорсткого обмеження вихідної напруги
регулятора. Рівні обмеження налогоджуться
R29
та R34.
Напруга
![]() подається
на вхід В7, а сигнал зворотного зв’язку
подається
на вхід В7, а сигнал зворотного зв’язку![]() –
на В8. Виходом регулятора швидкості та
завдання на струм є канал В18. Для
забезпечення обмеження напруги на
виводи В26, В5 подан нуль, на В22 подано
+15 В, на А17 подано – 15 В.
–
на В8. Виходом регулятора швидкості та
завдання на струм є канал В18. Для
забезпечення обмеження напруги на
виводи В26, В5 подан нуль, на В22 подано
+15 В, на А17 подано – 15 В.
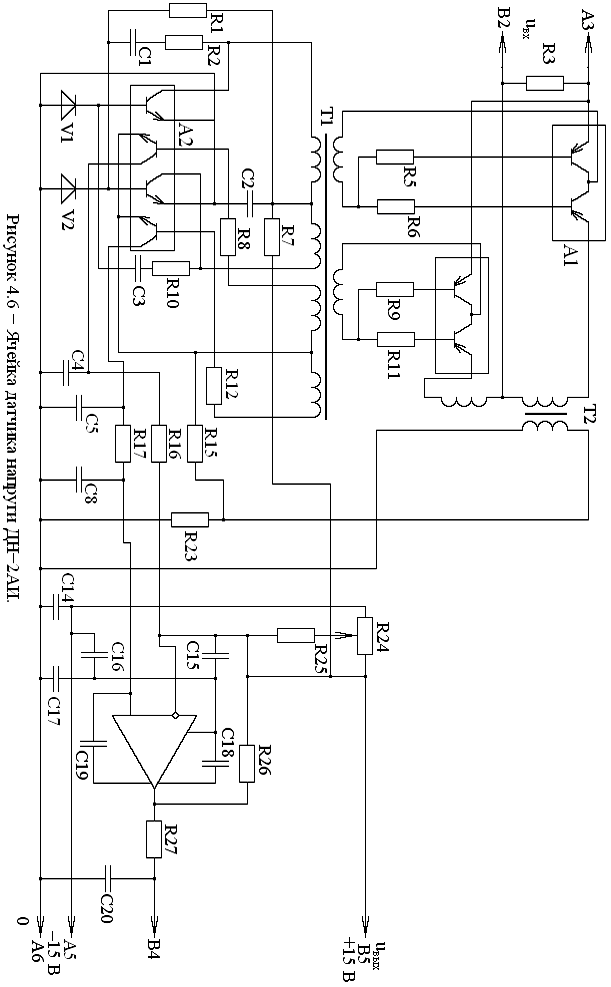
У якості давача швидкості використовується комірка ДН – 2АИ, що наведена на рисунку 4.6.
5.4 Реалізація задатчика інтенсивності
Для формування плавної зміни сигналу завдання швидкості при розгоні та гальмуванні привода використовуємо задатчик інтенсивності. У системі керування використовуємо ячейку ЗИ−2АИ, зображену на рисунку 4.4. Він складається з інтегратора на ОУА2, суматора на А1 в режимі обмеження і схеми регулюємого двополярного обмеження на ОУА3. Вихідна напруга суматора А1 поступає на вхід інтегратора А2 крізь резистор R18.
Постійна інтегрування:
![]()
Струм якоря при розгоні:
![]()
Струм якоря:
![]()
![]()
З цих роздумів можливо визначити параметри комірки, прийнявши С7=100 мкФ:
![]()
Входом ЗІ є канал В8, а вихідом – канал А7.
Вихідний сигнал РС – 1АИ поступає на вхід х комірки МД – 3АИ, а на вхід у поступає сигнал пропорційний швидкості ЗІ.
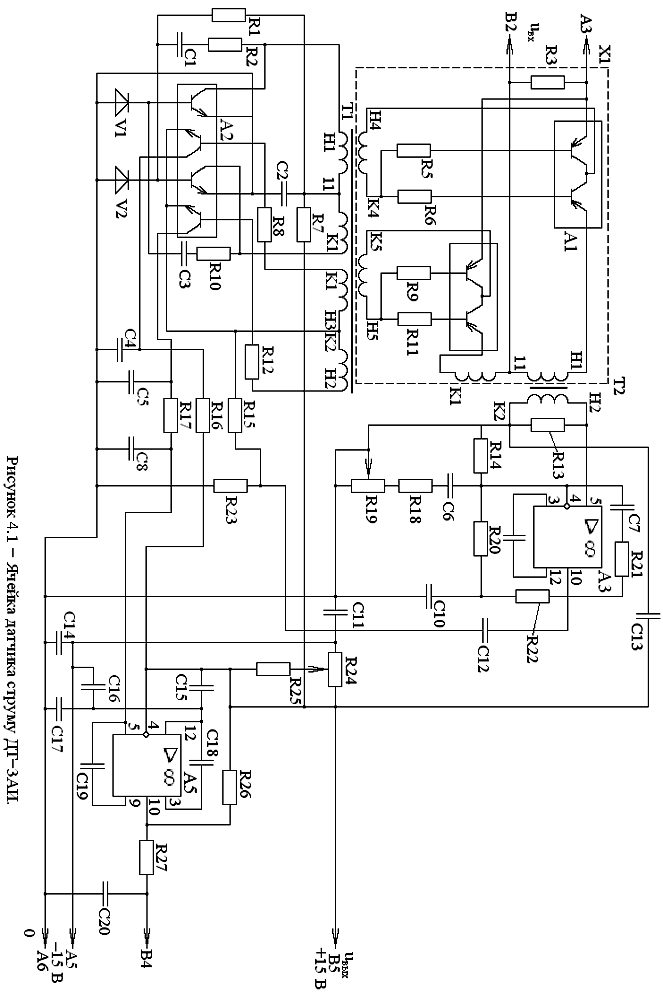


Рисунок 4.4– ЯчейкаЗИ−2АИ.

6. Моделювання системи керування.

ДодатокА. Перелік зауважень нормоконтролера до курсового проекту
Студенту Паніотову Олександр групи Ф – 03б(ЕАПУ)
|
Призначення документа |
Документ |
Умовні позначення |
Зміст зауваження |
|
|
|
|
|
Список використаної літератури
1.”Методические указания к выполнению курсового проекта по дисциплине “CУЭП””,Донецьк, ДОнНТУ, 2002р.
2.”Комплектные тиристорные электроприводы”,Перельмутер,М., 1988р.
3.”Справочные данные по электроприводу” М., 1965р.
4.”Cинтез вентильных приводов постоянного тока”, Коцегуб, Донецьк, 1997р.